1.本发明涉及一种抛光装置,具体涉及适用于玻璃材质的高精度光学抛光及修整面型的一种机器人气囊抛光装置。
背景技术:
2.普通行星运动磨头和平转动磨头只能对光学玻璃表面进行抛光,不能进行面型修整,抛光效果达不到抛光的要求。
技术实现要素:
3.本发明的目的是提供一种机器人气囊抛光装置,既能用作面接触抛光,又能近似点接触进行面型修整;相较于传统行星运动磨头,拥有更高的转速,能够更快的进行抛光;本发明采用六轴机器人代替传统机床,位移更加灵活,可以加工难度更大的非球面工件。
4.为了达到上述目的,本发明有如下技术方案:
5.本发明的一种机器人气囊抛光装置,包括橡胶磨头,基座,磨头压块,中空旋转平台,伺服电机,平台安装板,六轴机器人安装板,连接板,气管,空压机,高速旋转接头,防水板,六轴机器人,聚氨酯抛光片,所述聚氨酯抛光片粘贴在橡胶磨头上,磨头压块和基座通过螺纹连接固定,磨头压块和基座将橡胶磨头夹紧在中间,中空旋转平台安装在平台安装板上,平台安装板一端与基座连接,平台安装板另一端与伺服电机连接,平台安装板和机器人安装板通过连接板连接,机器人安装板安装在六轴机器人上,所述防水板安装在平台安装板和机器人安装板上,高速旋转接头安装在基座顶部,空压机与气管连接,气管插入高速旋转接头,能给橡胶磨头供气。
6.其中,所述聚氨酯抛光片为平面圆形薄片,在圆周上,每隔90度切有开口,使得聚氨酯抛光片能贴紧橡胶磨头的曲面。
7.其中,所述气管是通过高速旋转接头与基座连接,能实现气管不动,基座旋转带动橡胶磨头旋转。
8.由于采取了以上技术方案,本发明的的优点在于:
9.1、本发明因为采用空压机的恒压气源,能使得橡胶磨头鼓起,通过控制压缩距离,既可以用作面接触抛光,又可以近似点接触进行面型修整。
10.2、相较于传统行星运动磨头,拥有更高的转速,能够更快的进行抛光。
11.3、采用六轴机器人代替传统机床,位移更加灵活,可以加工难度更大的非球面工件。
附图说明
12.图1为本发明的整体结构示意图;
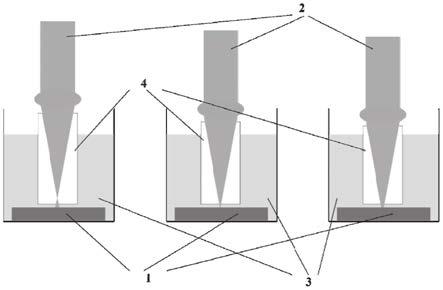
13.图2为本发明的气囊抛光装置的放大示意图;
14.图3为图2的剖视图的放大示意图;
15.图4为本发明的气囊抛光装置的立体的放大示意图。
16.图中,1.橡胶磨头;2.基座;3.磨头压块;4.中空旋转平台;5.伺服电机;6.平台安装板;7.机器人安装板;8.连接板;9.气管;10.高速旋转接头;11.防水板;12.六轴机器人;13.聚氨酯抛光片。
具体实施方式
17.以下实施例用于说明本发明,但不用来限制本发明的范围。
18.本发明的一种机器人气囊抛光装置,包括橡胶磨头,基座,磨头压块,中空旋转平台,伺服电机,平台安装板,六轴机器人安装板,连接板,气管,空压机,高速旋转接头,防水板,六轴机器人,聚氨酯抛光片,所述聚氨酯抛光片粘贴在橡胶磨头上,磨头压块和基座通过螺纹连接固定,磨头压块和基座将橡胶磨头夹紧在中间,中空旋转平台安装在平台安装板上,平台安装板一端与基座连接,平台安装板另一端与伺服电机连接,平台安装板和机器人安装板通过连接板连接,机器人安装板安装在六轴机器人上,所述防水板安装在平台安装板和机器人安装板上,高速旋转接头安装在基座顶部,空压机与气管连接,气管插入高速旋转接头,能给橡胶磨头供气。
19.所述聚氨酯抛光片为平面圆形薄片,在圆周上,每隔90度切有开口,使得聚氨酯抛光片能贴紧橡胶磨头的曲面;所述聚氨酯抛光片的圆周上设有倒角,所述橡胶磨头底部圆周上也设有倒角。
20.所述气管是通过高速旋转接头与基座连接,能实现气管不动,基座旋转带动橡胶磨头旋转。
21.本发明工作过程:
22.1).伺服电机通过中空旋转平台带动基座旋转,基座带动橡胶磨头旋转;
23.2).空压机给气管通气,使得橡胶磨头鼓起;
24.3).六轴机器人能带动整个气囊抛光装置在空间的多个方向上移动;
25.工作时,伺服电机、气管相对于机器人安装安装板静止,通过伺服电机带动中空旋转平台,再带动基座及橡胶磨头高速旋转;通过给橡胶磨头供气,保障橡胶磨头有恒定压力;
26.气管通过高速旋转接头与基座连接,才能实现气管不动,基座旋转。
27.伺服电机:富士,gyb401d5
‑
rg2,但不限于该产品;
28.六轴机器人:kuka kr 70r2100,但不限于该产品;
29.空压机采用juba的空压机,型号:jb550wx2,但不限于该产品;
30.显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无法对所有的实施方式予以穷举。凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
技术特征:
1.一种机器人气囊抛光装置,其特征在于:包括橡胶磨头,基座,磨头压块,中空旋转平台,伺服电机,平台安装板,六轴机器人安装板,连接板,气管,空压机,高速旋转接头,防水板,六轴机器人,聚氨酯抛光片,所述聚氨酯抛光片粘贴在橡胶磨头上,磨头压块和基座通过螺纹连接固定,磨头压块和基座将橡胶磨头夹紧在中间,中空旋转平台安装在平台安装板上,平台安装板一端与基座连接,平台安装板另一端与伺服电机连接,平台安装板和机器人安装板通过连接板连接,机器人安装板安装在六轴机器人上,所述防水板安装在平台安装板和机器人安装板上,高速旋转接头安装在基座顶部,空压机与气管连接,气管插入高速旋转接头,能给橡胶磨头供气。2.按照权利要求1所述的一种机器人气囊抛光装置,其特征在于:所述聚氨酯抛光片为平面圆形薄片,在圆周上,每隔90度切有开口,使得聚氨酯抛光片能贴紧橡胶磨头的曲面。3.按照权利要求1所述的一种机器人气囊抛光装置,其特征在于:所述气管是通过高速旋转接头与基座连接,能实现气管不动,基座旋转带动橡胶磨头旋转。
技术总结
本发明涉及一种机器人气囊抛光装置,聚氨酯抛光片粘贴在橡胶磨头上,磨头压块和基座通过螺纹连接固定,磨头压块和基座将橡胶磨头夹紧在中间,中空旋转平台安装在平台安装板上,平台安装板一端与基座连接,平台安装板另一端与伺服电机连接,平台安装板和机器人安装板通过连接板连接,机器人安装板安装在六轴机器人上,防水板安装在平台安装板和机器人安装板上,空压机与气管连接,气管插入高速旋转接头;本发明既能用作面接触抛光,又能近似点接触进行面型修整;相较于传统行星运动磨头,拥有更高的转速,能够更快的进行抛光;本发明采用六轴机器人代替传统机床,位移更加灵活,可以加工难度更大的非球面工件。工难度更大的非球面工件。工难度更大的非球面工件。
技术研发人员:李冰 陈威 郑曙光
受保护的技术使用者:武汉大衍精密光电技术有限公司
技术研发日:2021.07.30
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。