1.本实用新型涉及制鞋设备技术领域,具体涉及一种制鞋全自动双工位打磨设备。
背景技术:
2.自从改革开发政策实施以来,中国制鞋行业产销需求与投资前瞻制鞋工业作为最早开发开放的产业有了突飞猛进的发展,人们对鞋的穿用要求越来越高,我国的鞋类分为皮鞋、布鞋、胶鞋、塑料鞋,称为四鞋。而四种鞋从原料、辅料、加工装配工艺、款式、功能都在渗透,互相借鉴,取长补短,又互相竞争和冲击。因此促使鞋的造型款式、结构用料、功能等方面都在日新月异的变化。而制鞋行业是典型的劳动密集型行业。目前国内制鞋行业里都使用的传统做法。
3.现有的鞋业制造工厂,其鞋面腰部或者其他部位的打磨作业还是采用人工操作,把鞋子放在大底上,用笔在鞋子上面画出大底边沿线,另一个工人按前面的标记打磨或上胶水,但显然,这种方法的生产效率较为低下。同时,现有的鞋面打磨机器,其加压机构的压力值一般为固定值,客户不能根据不同鞋子,因为其制造时所采用的材质不同,所以需要的打磨程度不同,来改变加压机构的压力值,最终得不到最为理想的产品。
技术实现要素:
4.本实用新型的目的在于针对现有技术的缺陷和不足,提供一种设计合理的制鞋全自动双工位打磨设备,可随时调整打磨头机构的压力值,使接触面可柔性而均匀打磨,打磨后除尘收纳,自动通过吸尘管道输出到除尘收纳柜内;能够自动完成测试鞋子的鞋型、码数及外观;双工位治具放料,可左右两边上料同时节省时间,生产效率高;能够代替人工作业,减少人工的劳动力,稳定;实用性高。
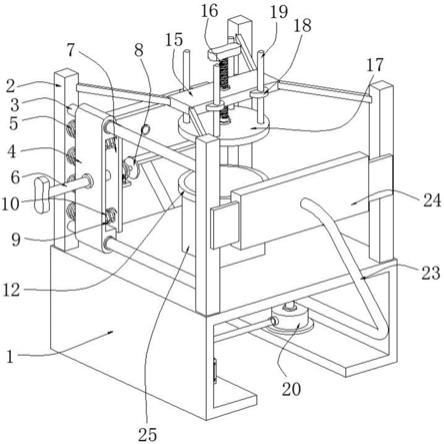
5.为达到上述目的,本实用新型采用了下列技术方案:它包含下机柜及电控箱、触屏操作界面、上机保护罩、除灰收纳箱、六轴智能机器人、移动模组机构、通用性制鞋夹持机构和除尘机视觉检测机构;下机柜及电控箱内设有移动模组机构,移动模组机构上活动连接有通用性制鞋夹持机构,位于移动模组机构后侧的下机柜及电控箱的台面上固定有六轴智能机器人,六轴智能机器人的输出端上连接有除尘机视觉检测机构;所述的上机保护罩罩设在移动模组机构、通用性制鞋夹持机构、六轴智能机器人以及除尘机视觉检测机构的外部,上机保护罩的前侧面开设有产品上料口;位于产品上料口上部份上机保护罩上固定有触屏操作界面3;下机柜及电控箱的后侧固定有除灰收纳箱5;
6.所述的移动模组机构由伺服电机、减速机、传动模组和拖链构成;下机柜及电控箱内并列设有两个传动模组,每个传动模组的顶端均与减速机连接,减速机与伺服电机的输出端连接,传动模组中的滑块上连接有通用性制鞋夹持机构,且拖链的一端与滑块固定,拖链的另一端固定在传动模组的侧边。
7.进一步地,所述的通用性制鞋夹持机构由模组连接座、气缸固定板、夹持薄型气缸、联动杆、钣金延伸座、prid代码识别器安装罩、楦头、识别有无产品传感器、传感器座、传
感器延伸座、气缸l型快接头、连接侧板、楦头夹持器、 prid代码识别器和prid代码识别器安装座构成;模组连接座固定在传动模组中的滑块上,模组连接座上固定有气缸固定板,气缸固定板上固定有夹持薄型气缸,夹持薄型气缸的输出端上对称铰接有联动杆,联动杆的另一端与楦头夹持器铰接,楦头夹持器的下边缘铰接在相对设置的两个连接侧板的底部;两个连接侧板均固定在气缸固定板上,其中一个连接侧板的外侧上部固定有钣金延伸座,钣金延伸座上固定有prid代码识别器安装罩,位于prid代码识别器安装罩内的钣金延伸座上固定有prid代码识别器安装座,prid代码识别器安装座上固定有prid代码识别器;另一个连接侧板的外侧壁上由下至上分别固定有气缸l型快接头和传感器延伸座,传感器延伸座上固定有传感器座,传感器座上固定有识别有无产品传感器;上述楦头架设在两个连接侧板的顶端,且与楦头夹持器的上边缘活动卡设。
8.进一步地,所述的除尘机视觉检测机构由机器人连接固定板、电机侧方保护板、电机上固定板、电机、电机中心转轴、电机下固定板、检测薄型气缸、除尘管固定座、缸连接件、除尘管道、除尘保护罩、视觉相机保护罩、相机主体、视觉相机镜头、打磨头和吸尘器构成;机器人连接固定板固定在六轴智能机器人的输出端上,机器人连接固定板的下表面两侧均固定有电机侧方保护板,两个电机侧方保护板之间设有电机上固定板,电机上固定板的底部固定有电机,电机的底部固定有电机下固定板,电机下固定板的一侧利用缸连接件与检测薄型气缸的输出端铰接,检测薄型气缸固定在机器人连接固定板的底部,电机的两侧利用电机中心转轴旋接在两侧的电机侧方保护板上,电机的输出端连接有电机连接件,电机连接件上连接有打磨头;位于打磨头的一侧设有除尘保护罩,除尘保护罩贯通连接有除尘管道,除尘管道利用除尘管固定座固定在视觉相机保护罩内,且除尘管道另一端与吸尘器连接,吸尘器固定在下机柜及电控箱的侧壁上;上述视觉相机保护罩内固定有相机主体,相机主体上连接有视觉相机镜头。
9.采用上述结构后,本实用新型的有益效果是:本实用新型提供了一种制鞋全自动双工位打磨设备,可随时调整打磨头机构的压力值,使接触面可柔性而均匀打磨,打磨后除尘收纳,自动通过吸尘管道输出到除尘收纳柜内;能够自动完成测试鞋子的鞋型、码数及外观;双工位治具放料,可左右两边上料同时节省时间,生产效率高;能够代替人工作业,减少人工的劳动力,稳定;实用性高。
10.附图说明:
11.图1是本实用新型的结构示意图。
12.图2是本实用新型中上机保护罩内部结构示意图。
13.图3是本实用新型中六轴智能机器人与除尘机视觉检测机构的连接示意图。
14.图4是本实用新型中移动模组机构的结构示意图。
15.图5是本实用新型中通用性制鞋夹持机构的内部结构示意图。
16.图6是本实用新型中除尘机视觉检测机构的结构示意图。
17.图7是本实用新型中除尘机视觉检测机构的内部结构示意图。
18.图8是本实用新型中吸尘器的位置示意图。
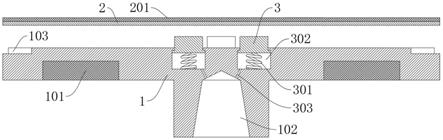
19.图9是本实用新型中prid代码识别器、prid代码识别器安装座的安装位置示意图。
20.附图标记说明:
21.下机柜及电控箱1、产品上料口2、触屏操作界面3、上机保护罩4、除灰收纳箱5、六
轴智能机器人6、移动模组机构7、伺服电机7
‑
1、减速机7
‑
2、传动模组7
‑
3、拖链7
‑
4、通用性制鞋夹持机构8、模组连接座8
‑
1、气缸固定板8
‑
2、夹持薄型气缸8
‑
3、联动杆8
‑
4、钣金延伸座8
‑
5、prid代码识别器安装罩8
‑
6、楦头8
‑
7、识别有无产品传感器8
‑
8、传感器座8
‑
9、传感器延伸座8
‑
10、气缸l型快接头8
‑
11、连接侧板8
‑
12、楦头夹持器8
‑
13、 prid代码识别器8
‑
14、prid代码识别器安装座8
‑
15、除尘机视觉检测机构9、机器人连接固定板9
‑
1、电机侧方保护板9
‑
2、电机上固定板9
‑
3、电机9
‑
4、电机中心转轴9
‑
5、电机下固定板9
‑
6、电机连接件9
‑
7、检测薄型气缸9
‑
8、除尘管固定座9
‑
9、缸连接件9
‑
10、除尘管道9
‑
11、除尘保护罩9
‑
12、视觉相机保护罩9
‑
13、相机主体9
‑
14、视觉相机镜头9
‑
15、打磨头9
‑
16、吸尘器9
‑
17。
22.具体实施方式:
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.如图1
‑
图9所示,本具体实施方式采用如下技术方案:它包含下机柜及电控箱1、触屏操作界面3、上机保护罩4、除灰收纳箱5、六轴智能机器人6、移动模组机构7、通用性制鞋夹持机构8和除尘机视觉检测机构9;下机柜及电控箱1内设有移动模组机构7,移动模组机构7上活动连接有通用性制鞋夹持机构8,位于移动模组机构7后侧的下机柜及电控箱1的台面上固定有六轴智能机器人6,六轴智能机器人6的输出端上连接有除尘机视觉检测机构9;所述的上机保护罩4罩设在移动模组机构7、通用性制鞋夹持机构8、六轴智能机器人6以及除尘机视觉检测机构9的外部,上机保护罩4的前侧面开设有产品上料口2;位于产品上料口2上部份上机保护罩4上固定有触屏操作界面3;下机柜及电控箱1的后侧固定有除灰收纳箱5;
25.所述的移动模组机构7由伺服电机7
‑
1、减速机7
‑
2、传动模组7
‑
3和拖链7
‑
4构成;下机柜及电控箱1内并列设有两个传动模组7
‑
3,每个传动模组7
‑
3的顶端均与减速机7
‑
2连接,减速机7
‑
2与伺服电机7
‑
1的输出端连接,传动模组7
‑
3中的滑块上连接有通用性制鞋夹持机构8,且拖链7
‑
4的一端与滑块固定,拖链7
‑
4的另一端固定在传动模组7
‑
3的侧边;
26.所述的通用性制鞋夹持机构8由模组连接座8
‑
1、气缸固定板8
‑
2、夹持薄型气缸8
‑
3、联动杆8
‑
4、钣金延伸座8
‑
5、prid代码识别器安装罩8
‑
6、楦头8
‑
7、识别有无产品传感器8
‑
8、传感器座8
‑
9、传感器延伸座8
‑
10、气缸l型快接头8
‑
11、连接侧板8
‑
12、楦头夹持器8
‑
13、 prid代码识别器8
‑
14和prid代码识别器安装座8
‑
15构成;模组连接座8
‑
1固定在传动模组7
‑
3中的滑块上,模组连接座8
‑
1上固定有气缸固定板8
‑
2,气缸固定板8
‑
2上固定有夹持薄型气缸8
‑
3,夹持薄型气缸8
‑
3的输出端上对称铰接有联动杆8
‑
4,联动杆8
‑
4的另一端与楦头夹持器8
‑
13铰接,楦头夹持器8
‑
13的下边缘铰接在相对设置的两个连接侧板8
‑
12的底部;两个连接侧板8
‑
12均固定在气缸固定板8
‑
2上,其中一个连接侧板8
‑
12的外侧上部固定有钣金延伸座8
‑
5,钣金延伸座8
‑
5上固定有prid代码识别器安装罩8
‑
6,位于prid代码识别器安装罩8
‑
6内的钣金延伸座8
‑
5上固定有prid代码识别器安装座8
‑
15,prid代码识别器安装座8
‑
15上固定有prid代码识别器8
‑
14;另一个连接侧板8
‑
12的外侧壁上由下至上分别固定有气缸l型快接头8
‑
11和传感器延伸座8
‑
10,传感器延伸座8
‑
10上固定有传感器座8
‑
9,传感器座8
‑
9上固定有识别有无产品传感器8
‑
8;上述楦头8
‑
7架设在两个连接侧板8
‑
12
的顶端,且与楦头夹持器8
‑
13的上边缘活动卡设;
27.所述的除尘机视觉检测机构9由机器人连接固定板9
‑
1、电机侧方保护板9
‑
2、电机上固定板9
‑
3、电机9
‑
4、电机中心转轴9
‑
5、电机连接件9
‑
7、检测薄型气缸9
‑
8、除尘管固定座9
‑
9、缸连接件9
‑
10、除尘管道9
‑
11、除尘保护罩9
‑
12、视觉相机保护罩9
‑
13、相机主体9
‑
14、视觉相机镜头9
‑
15、打磨头9
‑
16和吸尘器9
‑
17构成;机器人连接固定板9
‑
1固定在六轴智能机器人6的输出端上,机器人连接固定板9
‑
1的下表面两侧均固定有电机侧方保护板9
‑
2,两个电机侧方保护板9
‑
2之间设有电机上固定板9
‑
3,电机上固定板9
‑
3的底部固定有电机9
‑
4,电机9
‑
4的底部固定有电机下固定板9
‑
6,电机下固定板9
‑
6的一侧利用缸连接件9
‑
10与检测薄型气缸9
‑
8的输出端铰接,检测薄型气缸9
‑
8固定在机器人连接固定板9
‑
1的底部,电机9
‑
4的两侧利用电机中心转轴9
‑
5旋接在两侧的电机侧方保护板9
‑
2上,电机9
‑
4的输出端连接有电机连接件9
‑
7,电机连接件9
‑
7上连接有打磨头9
‑
16;位于打磨头9
‑
16的一侧设有除尘保护罩9
‑
12,除尘保护罩9
‑
12贯通连接有除尘管道9
‑
11,除尘管道9
‑
11利用除尘管固定座9
‑
9固定在视觉相机保护罩9
‑
13内,且除尘管道9
‑
11另一端与吸尘器9
‑
17连接,吸尘器9
‑
17固定在下机柜及电控箱1的侧壁上;上述视觉相机保护罩9
‑
13内固定有相机主体9
‑
14,相机主体9
‑
14上连接有视觉相机镜头9
‑
15。
28.本具体实施方式的工作原理:人工将产品装置在通用性制鞋夹持机构8,通用性制鞋夹持机构8中的识别有无产品传感器8
‑
8识别是否有产品,当识别到有产品时,通用性制鞋夹持机构8中的rfid代码识别器8
‑
14进行代码识别检测,检测鞋码数、型号是否与系统中对应的型号相同,测试完成后,左侧的移动模组机构7启动,利用伺服电机7
‑
1驱动传动模组7
‑
3,从而带动通用性制鞋夹持机构8移动,将通用性制鞋夹持机构8传动到打磨工作区等待鞋子外观检测和定位检测,通过六轴智能机器人6移动除尘机视觉检测机构9,从而带动除尘机视觉检测机构9中的视觉相机(相机主体9
‑
14、视觉相机镜头9
‑
15)识别对位并进行检测,检测完毕后再启动除尘机视觉检测机构9中的电机9
‑
4,进行打磨鞋子边缘,从鞋子的侧边开始围绕鞋子周边绕行打磨;利用检测薄型气缸9
‑
8控制电机9
‑
4的旋转,从而调节打磨头9
‑
16的打磨角度;打磨同时除尘机视觉检测机构9中的吸尘器将去除的残物和粉尘通过吸尘抽走到除灰收纳箱5内,以免造成机器的正常运作,工序完成后左侧的移动模组机构7带动治具退回原点等待取料,将完成后的产品取走即可;同步右侧的移动模组机构7同时进行生产。
29.采用上述结构后,本具体实施方式的有益效果如下:
30.1、根据手工打磨作业方式设计而实现现有的打磨方式,可随时调整打磨头机构的压力值,使接触面可柔性而均匀打磨;
31.2、设备有除尘装置,同时打磨后除尘收纳,自动通过吸尘管道输出到除尘收纳柜内;
32.3、有ccd视觉相机自动检测鞋子是否放在可打磨位置识别并作出判断;能够自动完成测试鞋子的鞋型、码数及外观;
33.4、双工位治具放料,可左右两边上料同时节省时间,生产效率高;能够代替人工作业,减少人工的劳动力,稳定;实用性高。
34.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进
行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。