1.本发明涉及船舶喷涂设备,尤其涉及一种用于船舶分段涂装的移动式索并联喷涂装备。
背景技术:
2.目前,国内的大多数船厂仍然采用传统的人工喷涂方式对分段式船体进行喷涂。由于船体较为庞大,多数采用搭脚手架式、机械设备托举式、机械设备吊装式将涂装工人送至高处进行人工涂装。此种方式不仅较为危险,容易产生安全事故,而且船体涂装涂料内含有大量的有毒物质,对工人的健康造成很大的威胁。
3.现有技术中,自动化喷涂设备大多为多轴串联式机械手臂尾部加装喷枪进行自动化喷涂,由于分段式船体结构较为复杂,喷头需要达到各种不同的喷涂位置、喷涂姿势,为了实现无人化自动喷涂,需要对喷涂装置整体吊装,施加x向、y向、z向等移动自由度,但是同样会出现三个问题:一是,全部采用串联方式连接,实现多轴联动,会累积误差,到达末端时精度较低。二是,若只增加x向、y向、z向移动机构,当待喷涂件结构过于复杂、死角过多时,由于装置的整体无法进行角度调节,很可能造成细节处理不到位,喷涂不均匀,致使返喷率较高。三是,串联组成的机构都是由刚度很大的部件组成,多轴联动时运动惯量大,当机构达到九轴甚至以上时,会出现末端惯性较大,使最终喷涂精度较低。
技术实现要素:
4.发明目的:针对现有技术存在的问题,本发明的目的是提供一种用于船舶分段涂装的移动式索并联喷涂装备,能够实现大行程、多角度的联动控制,满足大型分段船舶构件的喷涂需求,并且能够保证狭小复杂区域的喷涂质量与效率。
5.技术方案:一种用于船舶分段涂装的移动式索并联喷涂装备,包括:
6.支撑行架,沿y向布置,包括一个或多个y向轨道;
7.空中y向移动机构,架置在支撑行架上,与支撑行架的y向轨道滑动连接,实现y向运动;所述空中y向移动机构包括至少一个x向轨道;
8.空中x向移动机构,安装在空中y向移动机构上,与其x向轨道滑动连接,实现x向运动;
9.z向调整机构,通过吊装平台安装在空中x向移动机构的下方,所述吊装平台上设有升降机构;
10.喷涂机械手臂,安装在z向调整机构的升降机构上;
11.地轨y向移动液压升降平台,设置在z向调整机构一侧,且和z向调整机构柔性连接;具体的,地轨y向移动液压升降平台包括液压升降台、地轨y向传动机构、地轨、第一并联索组;所述地轨沿y向布置,液压升降台安装在地轨上,能够在地轨y向传动机构的驱动下沿地轨运动;所述液压升降台上设有地轨卷扬机,第一并联索组一端绕在地轨卷扬机上,另一端和z向调整机构连接,第一并联索组在地轨卷扬机的控制下进行收放,实现对z向调整机
构的角度微调。
12.进一步的,所述空中y向移动机构包括承载平台、x向轨道、y向伺服电机、y向导向轮机构、y向齿轮、y向齿条;
13.所述空中x向移动机构安装在承载平台上;y向齿条安装在y向轨道内侧,y向齿轮和y向伺服电机的输出轴连接,进行啮合传动;所述y向导向轮机构和支撑行架的y向轨道适配,用于空中y方向运动的承载和导向。
14.进一步的,所述空中x向移动机构包括x向伺服电机、承载小车、x向导向轮机构、x向齿轮、x向齿条;所示吊装平台安装在承载小车底部;
15.x向齿条安装在x向轨道内侧,x向齿轮和x向伺服电机的输出轴连接,进行啮合传动;所述x向导向轮机构安装在和承载小车一侧,与空中y向移动机构的x向轨道适配,用于空中x方向运动的承载和导向。
16.进一步的,所述升降机构包括第二并联索组、z向卷扬机、机械手安装平台;所述喷涂机械手臂安装在机械手安装平台底部;所述z向卷扬机安装在吊装平台上,吊装平台上安装有多个定滑轮,各定滑轮对应安装有一个可转动吊环;所述机械手臂安装平台上安装有多个动滑轮;
17.第二并联索组一端固定在吊装平台的可转动吊环上,另一端穿过机械手臂安装平台的动滑轮后回到吊装平台的定滑轮,通过定滑轮回到z向卷扬机;第二并联索组由z向卷扬机控制进行收放,实现机械手臂安装平台的z向移动以及角度调整。
18.可选的,所述喷涂机械手臂以螺栓连接方式安装在机械手臂安装平台下端,喷涂装置安装在喷涂机械手臂末端,通过机械手臂的运动进行喷涂工作。
19.进一步的,所述地轨y向传动机构包括地轨y向传动电机、地轨y向齿轮、地轨y向齿条;其中,地轨y向齿条安装在地轨的轨道内,地轨y向齿轮和地轨y向传动电机的输出轴连接,进行啮合传动。
20.有益效果:
21.与现有技术相比,本发明具有如下显著优点:
22.(1)本发明可实现大行程、多角度的联动控制,运动喷涂范围广,可以对分段船舶等大型待喷涂工件进行喷涂;并能够保证狭小复杂区域的喷涂质量与效率。
23.(2)本发明相较于纯串联式喷涂机器人,联动时具有更小的末端累计误差,并且可调节角度更广。
24.(3)本发明通过地轨y向卷扬机驱动并联索组,与整体机构联动,用来稳固被吊机械手臂安装平台,使整个系统更加的稳定。
25.(4)本发明z向采用索并联式驱动,进行联动时,具有优秀的避震性能。
26.(5)本发明索驱动方式运用动滑轮省力原理,可使得空中卷扬机的选型更加广泛,可选用更加轻小的卷扬机。
27.(6)本发明索驱动方式运用动滑轮废距离原理,增大卷扬机容许误差范围,提高被吊机械手臂安装平台z向移动与角度调整的精度。
28.(7)本发明均为模块化装配,便于安装、修理、装配。
29.(8)可实现无人化喷涂,无害人体健康。
附图说明
30.图1是本发明的总体结构;
31.图2(a)
‑
(b)是空中y向移动机构;
32.图3是空中x向移动机构;
33.图4是采用所并联驱动的z向调整机构;
34.图5是动滑轮式拉锁方式;
35.图6是地轨y向移动液压升降平台。
具体实施方式
36.下面结合实施例和附图对本发明的技术方案作进一步详细说明。
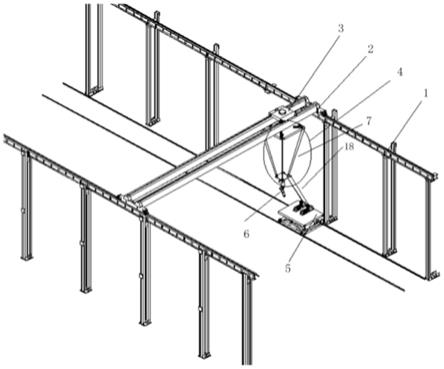
37.一种用于船舶分段涂装的移动式索并联喷涂装备,包括支撑行架1,空中y向移动机构2,空中x向移动机构3,z向调整机构4,地轨y向移动液压升降平台5,喷涂机械手臂6。
38.如图1所示,一对平行的支撑行架1沿y向延伸布置,每侧支撑行架1包括一个y向轨道13。空中y向移动机构2横向架置在两个支撑行架1之间,其两端和支撑行架1的y向轨道13滑动连接,通过齿轮齿条传动,实现喷涂机械手臂6在y方向的运动。空中x向移动机构3安装在空中y向移动机构2上,同样通过齿轮齿条传动,实现喷涂机械手臂6在x方向的运动。z向调整机构4安装在空中x向移动机构3底部,包括升降机构,喷涂机械手臂6安装在其末端,用于实现喷涂机械手臂6在z方向的运动。地轨y向移动液压升降平台5设置在z向调整机构4一侧,和z向调整机构4柔性连接。
39.如图2(a)、2(b)所示,空中y向移动机构2包括承载平台8、x向轨道9、y向伺服电机10,y向导向轮机构16、齿轮齿条机构(y向齿轮11、y向齿条12)。
40.承载平台8主要功能是将空中x方向移动机构3及其零件安装在上面,从而实现空中x向移动机构3在x方向的运动。
41.y向齿轮11、y向齿条12、y向伺服电机10与y向轨道13一起组成驱动结构。y向齿条12安装在轨道内侧,结构紧凑,y向齿轮11安装在y向伺服电机10上,啮合传动实现整体空中y向移动。
42.y向导向轮机构16和y向轨道13适配安装,用于承载空中y方向的运动导向。
43.如图3所示,空中x向移动机构3包括x向伺服电机14、承载小车15、x向导向轮机构22、齿轮齿条机构(x向齿轮、x向齿条)、吊装平台17。
44.吊装平台17通过连接件安装在承载小车15底部,用于承载z向调整机构4,带动z向调整机构一起移动。齿轮齿条机构、x向伺服电机14与x向轨道9一起组成驱动结构。x向齿条安装在x向轨道内侧,结构紧凑,x向齿轮安装在x向伺服电机14上,啮合传动实现整体空中x向移动。
45.x向导向轮机构22安装在承载小车15上,与x向轨道9适配,用于承载空中x方向的运动导向。
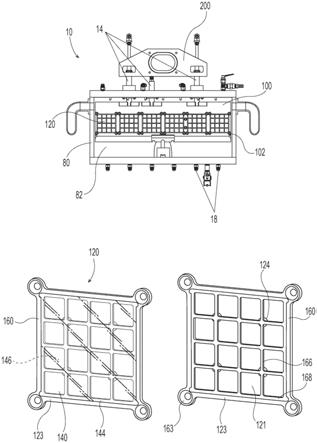
46.z向调整机构4的功能是实现被吊机械手臂安装平台的z向移动,以及该平台的角度调整。本实施例中,z向调整机构为索并联驱动式结构,包括机械手臂安装平台24、索四组(即第二并联索组7)。z向卷扬机安装在吊装平台17上,通过四组索的收放实现被吊机械手臂安装平台的z向移动,以及该平台的角度调整。
47.如图4所示,本实施例的吊装平台17为方形平台,吊装平台17上包括四组z向卷扬机19、四个定滑轮20、四个可转动吊环21。方形平台水平安装在空中x向移动机构3的承载小车15底部。四组z向卷扬机19安装在方形平台上;四个定滑轮20安装在方形平台的四个角上,四个可转动吊环21与定滑轮20一一对应,安装在方形平台下方的四角处。
48.机械手臂安装平台24为方形被吊平台,位于吊装平台17正下方,方形被吊平台的四个角上安装有四组动滑轮25,方形被吊平台通过第二并联索组7与吊装平台17连接。具体的,四组索一端分别固定在吊装平台的四个可转动吊环21上,另一端穿过被吊机械手臂安装平台的动滑轮25后回到吊装上平台的定滑轮20,通过定滑轮20回到四组z向卷扬机19,连接方式见图5。四组索分别由吊装平台的四组z向卷扬机控制收放,通过同步收放或者独立收放的方式,实现被吊机械手臂安装平台的z向移动,以及平台角度调整。例如,可通过控制四组z向卷扬机19以相同速度收放索组,实现被吊机械手臂安装平台整体在z向的移动,从而调整喷涂机械手臂6的高度;各z向卷扬机19也可以独立工作,当其中一个或者几个z向卷扬机19单独进行收放时,其下端的被吊机械手臂安装平台发生倾斜,即实现了角度的调整。
49.上述四组动滑轮的方式吊装,以动滑轮省一半力的原理,可使得空中z向卷扬机的选型更加广泛,可选用更加轻小的卷扬机。同时,由于动滑轮省力废二倍距离的原理,会增大卷扬机容许误差范围,提高被吊机械手臂安装平台z向移动与角度调整的精度。
50.需要说明的是,z向调整机构4中动滑轮组、定滑轮组、卷扬机组、索组的数量及位置可根据吊装平台、被吊机械手臂安装平台的尺寸、形状,以及角度调整的精度需求等因素作出适应性改变。
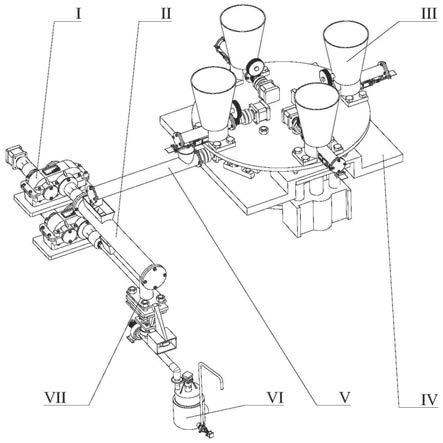
51.喷涂机械手臂6的作用是安装喷涂装置,实现各种复杂姿势的喷涂工作。可选的,喷涂机械手臂以螺栓连接方式安装在被吊机械手臂安装平台下端,喷涂装置安装在喷涂机械手臂末端,通过机械手臂的运动来进行喷涂工作。
52.地轨y向移动式液压升降平台5设置在z向调整机构4一侧,其通过第一并联索组18和机械手臂安装平台24柔性连接。如图6所示,本实施例中,地轨y向移动式液压升降平台5包括地轨30、地轨y向齿轮齿条机构(地轨y向齿轮28、地轨y向齿条29)、地轨y向传动电机27、液压升降台26、地轨y向卷扬机2组。
53.地轨30安装于车间地面上,液压升降台26放置在地轨30上,地轨y向传动电机27位于液压升降台26后端,地轨y向齿条29安装在地轨30的轨道内,地轨y向齿轮28安装在地轨y向传动电机27上,进行啮合传动。两组地轨卷扬机23安装在液压升降台26上面板,随液压升降台实现y向以及z向的移动。
54.在机械手臂安装平台24完成xyz向运动后,通过地轨y向卷扬机调整第一并联索组18和机械手臂安装平台24的张紧状态,对机械手臂安装平台进行稳固;当进行机械手臂安装平台24的角度调整时,控制液压升降台26沿y向运动,第一并联索组18拖动机械手臂安装平台24,实现机械手臂安装平台的角度调整;此方案通过联动来稳固被吊机械手臂安装平台,以及实现角度的微调,通过托举地轨两组卷扬机至一定高度,可有效避免索与被喷涂船体之间的干涉。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。