1.本发明涉及物流技术领域,尤其涉及一种多向箱式物流中转站及其传送方法。
背景技术:
2.自动化物流系统主要应用在银行、医院、饭店、行政中心等行业,以在医院中应用为例,将装有药品的或医疗器械的箱体,通过传送通道的方式运送到各个护士站或药房中,然后供医生护士取用,但护士站与药房空间有限,不能堆放大量药品的或医疗器械,而进货的位置与护士站与药房过远,容易出现医生护士需要用药时,药品的或医疗器械还没有到达护士站或药房。
3.因此需要中转站对药品的或医疗器械的箱体进行占存,但因为传统的中转站,只有单条传送通道只能实现单向传送,而中转站在实际使用过程中,同样以医院为例,护士站或药房有多余或错误的药品无法回收入中转站中。
技术实现要素:
4.针对现有技术中所存在的不足,本发明提供了一种多向箱式物流中转站及其传送方法,其解决了现有技术中存在的现有的中转站无法对出货的货物进行回存的技术问题。
5.根据本发明的实施例记载的一种多向箱式物流中转站,包括中转架、均布在所述中转架上的放置架装置、设置在所述中转架中部的垂直升降装置与设置在所述中转架底部的传送装置,所述传送装置包括抬起机构、伸缩机构与设置在所述抬起机构和伸缩机构下侧的固定传送机构,所述抬起机构和伸缩机构都与中转架活动连接,所述固定传送机构与中转架固定,所述伸缩机构与固定传送机构远离抬起机构一端都设有门装置。
6.进一步的,所述抬起机构包括传送辊结构与设置在所述传送辊结构下侧的摆臂机构,所述摆臂机构两侧安装在中转架上,所述摆臂机构与传送辊结构铰接。
7.进一步的,所述摆臂机构包括摆臂气缸、主动摆臂轴、被动摆臂轴与固定轴,所述固定轴两端固定在中转架上,所述主动摆臂轴与被动摆臂轴两端都活动安装在中转架上,且所述主动摆臂轴与被动摆臂轴分别设置在固定轴的两侧,所述摆臂气缸两端分别与固定轴和主动摆臂轴铰接,所述主动摆臂轴与被动摆臂轴都与传送辊结构铰接,所述主动摆臂轴、被动摆臂轴与固定轴的铰接处都设有摆臂板用于铰接。
8.进一步的,所述伸缩机构包括传送辊结构与设置在所述传送辊结构两侧的固定杆,所述中转架位于伸缩机构两侧位置设有伸缩轨道,所述固定杆上设有伸缩滑块,所述伸缩滑块安装在伸缩轨道上,所述传送辊结构下侧位置的中转架上设有伸缩电机,所述传送辊结构下侧固定有与伸缩轨道平行的齿条,所述伸缩电机采用齿轮连接齿条。
9.进一步的,所述传送辊结构与固定传送机构都包括两块固定板与均布在两块所述固定板之间的辊轴,相邻的所述辊轴一端采用传送带连接,任意一根所述辊轴的另一端连接有传送电机。
10.进一步的,所述中转架外包裹有外壳,所述外壳在抬起机构和伸缩机构与固定传
送机构两端留有进出货口,所述门装置设在一侧的进出货口内侧的中转架上。
11.进一步的,所述门装置包括门板与驱动门板的同步带机构,所述门板连接在同步带机构的同步带上,所述同步带机构的主动轮与被动轮活动连接在中转架上,所述主动轮位置的中转架上设有门电机,所述门板顶部与底部位置的中转架上设置有门轨道,所述门板的顶部与底部都设有门滑块,所述门滑块安装在门轨道上。
12.进一步的,所述抬起机构和伸缩机构位于垂直升降装置正下方位置两侧设有导向板,所述抬起机构和伸缩机构位于门装置与垂直升降装置之间位置设有光电开关,所述导向板与光电开关都固定在中转架上,所述伸缩机构与抬起机构相互远离一端都设有感应器;
13.伸缩机构上设有限位机构,所述限位机构包括两个限位器与感应片,所述感应片固定在伸缩机构上,两个所述限位器固定在中转架上,且两个所述限位器之间的距离为伸缩机构的移动行程,所述感应片会穿过对应限位器的感应位置。
14.进一步的,所述放置架装置、垂直升降装置、固定传送机构、抬起机构、伸缩机构、门装置、光电开关、感应器与限位器连接有控制系统。
15.根据本发明的实施例记载的一种多向箱式物流中转站的传送方法,包括:
16.进货暂存:
17.箱式物品进入所述抬起机构,所述控制系统控制抬起机构抬起;
18.所述控制系统控制放置架装置与垂直升降装置工作,将所述箱式物品放置到放置架装置上;
19.暂存出货:
20.所述控制系统控制伸缩机构往抬起机构侧移动,然后所述控制系统控制放置架装置与垂直升降装置工作,将所述箱式物品放置到伸缩机构上;
21.所述控制系统控制伸缩机构往远离抬起机构一侧移动,然后所述控制系统控制伸缩机构将箱式物品传送离开中转站;
22.物品回存:
23.箱式物品进入所述伸缩机构,所述控制系统控制所述伸缩机构将箱式物品往垂直升降装置侧传送,然后所述控制系统控制伸缩机构往抬起机构侧移动,使得所述箱式物品位于垂直升降机构正下方;
24.所述控制系统控制放置架装置与垂直升降装置工作,将所述箱式物品放置到放置架装置上;
25.直接出货与收货:
26.所述控制系统控制固定传送机构向一侧传送箱式物品,使得所述箱式货物直接穿过中转站实现出货与收货。
27.本发明的技术原理为:通过伸缩机构与抬起机构配合,满足了中转站正常的箱式物品的进货暂存与暂存出货的功能,同时还实现了箱式物品回存,还通过固定传送机构实现对箱式物品的直接出货和直接回收功能。
28.相比于现有技术,本发明具有如下有益效果:通过伸缩机构与抬起机构配合,其解决了现有技术中存在的现有的中转站无法对出货的货物进行回存的技术问题。
附图说明
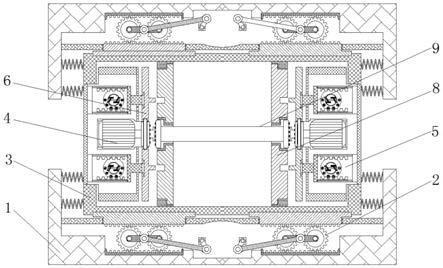
29.图1为本发明实施例的中转站结构示意图。
30.图2为本发明实施例的门装置结构示意图。
31.图3为本发明实施例的抬起机构结构示意图。
32.图4为本发明实施例的伸缩机构结构示意图。
33.图5为本发明实施例的传送辊结构的结构示意图。
34.图6为本发明实施例的抬起机构与伸缩机构的俯视图。
35.图7为图4的a部的局部放大图。
36.图8为图4的b部的局部放大图。
37.图9为本发明实施例的控制系统示意图。
38.上述附图中:100、中转架;101、带座轴承;102、门轨道;103、伸缩轨道;104、导向板;105、光电开关;106、感应器;110、放置架装置;120、垂直升降装置;130、传送装置;131、固定传送机构;140、外壳;141、进出货口;
39.200、抬起机构;201、摆臂板;210、摆臂机构;211、摆臂气缸;212、主动摆臂轴;213、被动摆臂轴;214、固定轴;
40.300、伸缩机构;310、固定杆;311、伸缩滑块;320、伸缩电机;321、齿轮;330、齿条;340、限位机构;341、限位器;342、感应片;
41.400、箱式物品;
42.500、门装置;510、门板;511、门滑块;520、同步带机构;521、主动轮;522、被动轮;523、门电机;
43.600、传送辊结构;610、固定板;620、辊轴;621、传送带;622、传送电机。
具体实施方式
44.下面结合附图及实施例对本发明中的技术方案进一步说明。
45.如图1所示的多向箱式物流中转站,包括中转架100、均布在所述中转架100上的放置架装置110、设置在中转架100中部的垂直升降装置120与设置在中转架100底部的传送装置130,通过传送装置130送入箱式物品400,垂直升降装置120用于抓取箱式物品400进行移动,放置架装置110用于放置箱式物品400,其中传送装置130包括抬起机构200、伸缩机构300与设置在抬起机构200和伸缩机构300下侧的固定传送机构131,抬起机构200和伸缩机构300都与中转架100活动连接,固定传送机构131与中转架100螺钉固定,伸缩机构300与固定传送机构131远离抬起机构200一端都设有门装置500,用于在不用中转站时闭合门装置500,防止灰尘进入。
46.如图1所示,中转架100外包裹有外壳140,外壳140在抬起机构200和伸缩机构300与固定传送机构131两端留有进出货口141,门装置500设置在一侧的进出货口141内侧的中转架100上。
47.如图2所示,门装置500包括门板510与驱动门板510的同步带机构520,门板510固定在同步带机构520的同步带上,且左右两块门板510分别要固定在同步带机构520的同步带的上下两侧,使得门板510会跟随同步带机构520移动,进行打开与关闭进出货口141,同步带机构520的主动轮521与被动轮522采用带座轴承101固定在中转架100上,主动轮521位
置的中转架100上螺栓固定有门电机523,采用门电机523驱动同步带机构520,门板510顶部与底部位置的中转架100上螺钉固定有门轨道102,门板510的顶部与底部都螺钉固定有门滑块511,门滑块511安装在门轨道102上,使得门滑块511能沿门轨道102移动。
48.如图3所示,抬起机构200包括传送辊结构600与设置在传送辊结构600下侧的摆臂机构210,摆臂机构210两侧安装在中转架100上,摆臂机构210与传送辊结构600铰接。
49.具体的摆臂机构210包括摆臂气缸211、主动摆臂轴212、被动摆臂轴213与固定轴214;其中固定轴214两端螺钉固定在中转架100上,主动摆臂轴212与被动摆臂轴213两端都采用带座轴承101安装在中转架100上,且主动摆臂轴212与被动摆臂轴213分别设置在固定轴214的两侧,摆臂气缸211两端分别与固定轴214和主动摆臂轴212销轴铰接,主动摆臂轴212与被动摆臂轴213都与传送辊结构600销轴铰接,主动摆臂轴212、被动摆臂轴213与固定轴214的铰接处都焊接固定有摆臂板201用于铰接。
50.抬起机构200升起时,摆臂气缸211伸出时,会推动主动摆臂轴212逆时针运动,进而推动抬起机构200的传送辊结构600向上运动,同时被动摆臂轴213被带动做逆时针转动。
51.如图3
‑
4所示,伸缩机构300包括传送辊结构600与设置在传送辊结构600两侧的固定杆310,中转架100位于伸缩机构300两侧位置螺钉固定有伸缩轨道103,固定杆310上螺钉固定有伸缩滑块311,伸缩滑块311安装在伸缩轨道103上,使得伸缩滑块311能沿伸缩轨道103移动,传送辊结构600下侧位置的中转架100上螺栓固定有伸缩电机320,传送辊结构600下侧螺钉固定有与伸缩轨道103平行的齿条330,伸缩电机320采用齿轮321连接齿条330,进而能驱动伸缩机构300的传送辊结构600进行移动。
52.如图5所示,传送辊结构600与固定传送机构131都包括两块固定板610与均布在两块固定板610之间的辊轴620,相邻的辊轴620一端采用传送带621连接,任意一根辊轴620的另一端连接有传送电机622。
53.具体的伸缩机构300的传送电机622螺栓固定在固定杆310上,抬起机构200的传送电机622螺栓固定在固定板610上,固定传送机构131的传送电机622螺栓固定在中转架100上。
54.如图6所示,抬起机构200和伸缩机构300位于垂直升降装置120正下方位置两侧设有导向板104,导向板104螺钉固定在中转架100上,导向板104用于调整箱式物品400的位置,方便垂直升降装置120抓取。
55.如图6所示,抬起机构200和伸缩机构300位于门装置500与垂直升降装置120之间位置设有光电开关105,光电开关105胶固定在中转架100上,伸缩机构300与抬起机构200相互远离一端都设有感应器106,用于感应箱式物品400。
56.如图7
‑
8所示,伸缩机构300上设有限位机构340,限位机构340包括两个限位器341与感应片342,感应片342螺钉固定在伸缩机构300的固定杆310上,两个限位器341胶固定在中转架100上,且两个限位器341之间的距离为伸缩机构300的移动行程,感应片342会穿过对应限位器341的感应位置。
57.如图9所示,放置架装置110、垂直升降装置120、固定传送机构131、抬起机构200、伸缩机构300、门装置500、光电开关105、感应器106与限位器341连接有控制系统,控制系统控制放置架装置110、垂直升降装置120、固定传送机构131与门装置500工作,控制系统通过光电开关105、感应器106和限位器341控制抬起机构200与伸缩机构300工作,具体的光电开
关105与伸缩机构300上的感应器106用于感应箱式物品400在伸缩机构300上的位置,而光电开关105与抬起机构200上的感应器106用于感应箱式物品400在抬起机构200上的位置,而限位器341用于限制伸缩机构300的移动距离;控制系统为自动化物流系统常用的控制系统,使得中转站融入整个自动化物流系统中。
58.多向箱式物流中转站的传送方法,包括:
59.进货暂存:
60.箱式物品400进入抬起机构200,控制系统控制抬起机构200抬起,控制系统控制放置架装置110与垂直升降装置120工作,将箱式物品400放置到放置架装置110上。
61.具体的抬起机构200没有抬起时:
62.箱式物品400进入抬起机构200,控制系统通过抬起机构200处的感应器106感应到箱式物品400,然后控制抬起机构200将箱式物品400传送到垂直升降装置120正下方,当光电开关105感应到箱式物品400抬起机构200停止传送,然后控制系统控制抬起机构200上升到与伸缩机构300平齐位置停止。
63.控制系统控制放置架装置110与垂直升降装置120工作,将箱式物品400放置到放置架装置110上,然后抬起机构200复位。
64.抬起机构200已经抬起时:
65.与上述步骤相同,只是控制系统无需控制抬起机构200上升到与伸缩机构300平齐位置停止。
66.进而实现了中转站占存两条货道传送而来的箱式物品400。
67.暂存出货:
68.控制系统控制伸缩机构300往抬起机构200侧移动,然后控制系统控制放置架装置110与垂直升降装置120工作,将箱式物品400放置到伸缩机构300上;控制系统控制伸缩机构300往远离抬起机构200一侧移动,然后控制系统控制伸缩机构200将箱式物品400传送离开中转站。
69.具体的进行前抬起机构200必须处于没有抬起状态,控制系统控制伸缩机构300往抬起机构200侧移动,直到感应片342进入限位器341的感应位置伸缩机构300停止移动,然后控制系统控制放置架装置110与垂直升降装置120工作,将箱式物品400放置到伸缩机构300上;然后控制系统控制伸缩机构300往远离抬起机构200一侧移动,直到感应片342进入限位器341的感应位置伸缩机构300停止移动,然后控制系统控制伸缩机构300将箱式物品400传送离开中转站。
70.物品回存:
71.箱式物品400进入伸缩机构300,控制系统控制伸缩机构300将箱式物品400往垂直升降装置120侧传送,然后控制系统控制伸缩机构300往抬起机构200侧移动,使得箱式物品400位于垂直升降机构120正下方;控制系统控制放置架装置110与垂直升降装置120工作,将箱式物品400放置到放置架装置110上。
72.具体的进行前抬起机构200必须处于没有抬起状态,箱式物品400进入伸缩机构300,控制系统通过伸缩机构300处的感应器106感应到箱式物品400,然后控制伸缩机构300将箱式物品400往垂直升降装置120侧传送,直到光电开关105感应到箱式物品400伸缩机构300停止传送,然后控制系统控制伸缩机构300往抬起机构200侧移动,直到感应片342进入
限位器341的感应位置伸缩机构300停止移动。
73.控制系统控制放置架装置110与垂直升降装置120工作,将箱式物品400放置到放置架装置110上,最后控制系统控制伸缩机构300往远离抬起机构200一侧移动,直到感应片342进入限位器341的感应位置伸缩机构300停止移动。
74.直接出货与收货:
75.控制系统控制固定传送机构131向一侧传送箱式物品400,使得箱式货物直接穿过中转站实现出货与收货。
76.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。