1.本实用新型属于农业机械技术领域,具体涉及一种育苗穴盘自动堆叠装置。
背景技术:
2.育苗穴盘堆叠是钵苗移栽生产流水线上的最后一步,将空穴盘堆叠成垛,便于后续的回收反复使用。目前国内在穴盘堆叠的设计上缺少简单高效的设备。因此对于机械移栽后的穴盘回收的处理方法也成为了一个重要的问题,目前工厂还是主要依靠人工来将穴盘一一堆叠起来,工人劳动强度大,取放的动作频率也较高,但效率较低。
3.目前也有一些堆叠机构的使用,主要分为三种,一种堆叠机构主要由穴盘输送机构、提升机构、卡止机构组成,通过提升机构将穴盘顶上去,再由卡止机构让穴盘落在该机构上。如申请号201621075071.9的“一种全自动钵苗移栽机叠盘机构”和申请号为201721697756.1的“钵盘叠盘机构”都是通过底部的气缸升降,再利用托举机构将穴盘顶起,再用卡止装置锁定;另一类堆叠机构如申请号为201410596049.8的“一种育苗播种流水线育苗盘自动分盘和叠盘装置”,通过机械臂的往复运动实现穴盘的堆叠动作;第三类堆叠机构如申请号为201910873844.x的“一种输送链式育苗穴盘堆叠装置与方法”,在输送带两侧布置输送链并装有l板,驱动机构带动链条来提升堆叠穴盘。
4.但上述堆叠机构都存在一些缺点:第一类机构的输送机构都要求是镂空的,从穴盘的底部将其提升,对于封闭型输送带就不能满足要求;第二类机械臂的位移量比较大,工作的效率不会很高,难以满足高速回收的要求;第三类采用链式堆叠,只能一次堆叠比较有限的数量,且容易出现偏差,结构上也较为复杂。
技术实现要素:
5.本实用新型的目的在于针对现有技术的不足,提供一种育苗穴盘自动堆叠装置,该装置结构简单、紧凑,一个双行程气缸单自由度就能完成对穴盘的收集堆叠,穴盘提升机构类似于杠杆,减小原动构件的输入推力的要求,整体的位移量小,能够大大提高穴盘堆叠效率以及后续的穴盘的重复利用。
6.本实用新型包括输送机构、穴盘提升机构和穴盘收集机构;所述的穴盘提升机构位于输送机构的输出端,穴盘收集机构位于穴盘提升机构正上方。所述的穴盘提升机构包括铝型材框架、双向气缸、连杆、l型杆和光杆;双向气缸的缸体固定在铝型材框架底部;双向气缸两端的推杆与两根连杆的一端分别铰接,两根连杆的另一端与两根l型杆的一端分别铰接;每根l型杆的两个臂连接位置与一根光杆构成转动副;两根光杆分设在铝型材框架两端,且均与铝型材框架固定;光杆的轴线沿输送机构的传输方向布置;每根l型杆的另一端与一块可回转翻板通过铰接轴铰接,且在可回转翻板下方设有一体成型的限位板;所述的铰接轴上套置有扭簧;扭簧一端与可回转翻板固定,另一端与限位板固定。双向气缸位于输送机构的输送带底部,l型杆连接有可回转翻板的一端位于输送带顶部。所述的穴盘收集机构包括收集架和可移动立板;收集架的两侧分别与一块可移动立板构成滑动副。
7.优选地,所述光杆的两端均固定有支撑座,支撑座与铝型材框架固定。
8.优选地,所述的输送机构包括机架、主动轴、从动轴、输送带、同步轮、同步带和步进电机;所述从动轴的两端通过轴承支承在两个轴承座一上;轴承座一与机架固定;所述的主动轴两端通过轴承支承在两个轴承座二上,轴承座二固定在机架上;主动轴与从动轴通过输送带连接;步进电机的底座固定在电机板上,电机板固定在机架上;一个同步轮固定在步进电机的输出轴上,另一个同步轮固定在主动轴一端,两个同步轮通过同步带连接;机架上位于输送带的输出端位置固定有光电传感器,该光电传感器的信号输出端与控制器连接;所述的步进电机由控制器控制;穴盘提升机构的双向气缸经换向阀与气泵连接,换向阀由控制器控制。
9.更优选地,所述的机架设有四个支脚。
10.更优选地,所述的轴承座一固定在连接板上,连接板开设的调节槽与机架开设的通孔通过螺栓和螺母连接。
11.更优选地,所述机架的两侧均固定有挡板。
12.优选地,所述的穴盘收集机构还包括固定在收集架顶部的光电传感器;穴盘收集机构的光电传感器信号输出端与控制器连接。
13.本实用新型具有的有益效果:
14.本实用新型的穴盘提升机构以双向气缸为原动件(也可以是其它双向直线运动部件,如液压缸、直线电机、滚珠丝杠等),只要一个双向气缸单自由度就能完成对穴盘的收集堆叠,l型杆采用杠杆原理减小原动构件的输入推力,能更加轻松地将多个穴盘提起;l型杆末端可回转翻板触碰穴盘时可外翻,并可由扭簧回复力复位;可见,本实用新型结构简单、紧凑,但堆叠效率却很高。
附图说明
15.图1为本实用新型的整体结构立体图;
16.图2为本实用新型中输送机构的结构立体图;
17.图3为本实用新型中穴盘提升机构的结构立体图;
18.图4为本实用新型中穴盘提升机构的结构侧视图;
19.图5为穴盘的结构立体图;
20.图6为本实用新型中可回转翻板与穴盘边沿底部接触时的状态示意图;
21.图7为本实用新型中穴盘提升机构抬升穴盘后输送机构输送来下一个穴盘的状态示意图;
22.图8为本实用新型中可回转翻板与穴盘边沿顶部接触时的状态示意图;
23.图9为本实用新型中穴盘提升机构的复位状态示意图。
具体实施方式
24.下面通过具体实施方式结合附图对本实用新型作进一步详细说明。
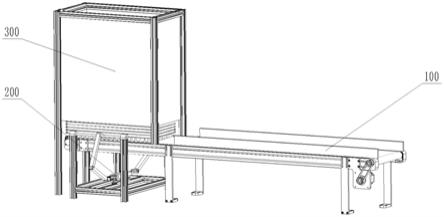
25.如图1所示,一种育苗穴盘自动堆叠装置,包括输送机构100、穴盘提升机构200和穴盘收集机构300;穴盘提升机构200位于输送机构100的输出端;穴盘收集机构300位于穴盘提升机构200正上方。
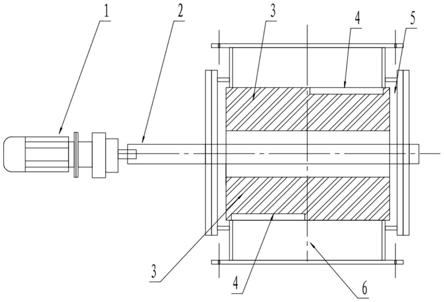
26.如图1、图3和图4所示,穴盘提升机构200包括铝型材框架201、双向气缸202(两端均设有推杆,且两端的推杆移动方向相反的气缸)、连杆204、l型杆205和光杆207;双向气缸202的缸体固定在铝型材框架201底部;双向气缸202两端的推杆203与两根连杆204的一端分别铰接,两根连杆204的另一端与两根l型杆205的一端分别铰接;每根l型杆205的两个臂连接位置与一根光杆207构成转动副;两根光杆207分设在铝型材框架201两端,且均与铝型材框架201固定;光杆207的轴线沿输送机构100的传输方向布置;每根l型杆205的另一端与一块可回转翻板208通过铰接轴铰接,且在可回转翻板208下方设有一体成型的限位板;铰接轴上套置有扭簧;扭簧一端与可回转翻板208固定,另一端与限位板固定。双向气缸202位于输送机构100的输送带107底部,l型杆205连接有可回转翻板208的一端位于输送带107顶部。
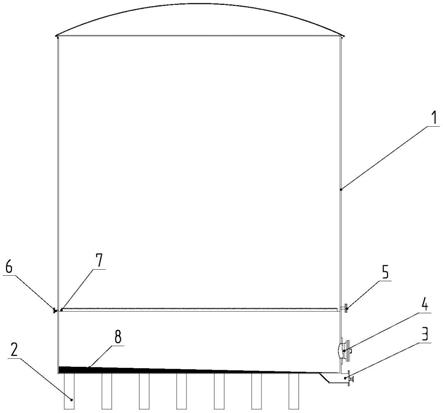
27.如图1、图6、图7、图8和图9所示,穴盘收集机构300包括收集架和可移动立板301;收集架的两侧分别与一块可移动立板301构成滑动副;穴盘108由穴盘收集机构300送入收集架的空间内,且不会发生比较大的位移;收集架收集满穴盘108后,人工拉开两块可移动立板301,将穴盘108取出。
28.作为一个优选实施例,如图3所示,光杆207两端均固定有支撑座206,支撑座206与铝型材框架201固定。
29.作为一个优选实施例,如图2所示,输送机构100包括机架101、主动轴113、从动轴105、输送带107、同步轮111、同步带112和步进电机115;从动轴105两端通过轴承支承在两个轴承座一104上;轴承座一104与机架101固定;主动轴113两端通过轴承支承在两个轴承座二114上,轴承座二114固定在机架101上;主动轴113与从动轴105通过输送带107连接;步进电机115的底座固定在电机板110上,电机板110固定在机架101上;一个同步轮111固定在步进电机115的输出轴上,另一个同步轮111固定在主动轴113一端,两个同步轮111通过同步带112连接;机架101上位于输送带107的输出端位置固定有光电传感器106,检测穴盘108是否到位;该光电传感器106的信号输出端与控制器连接;步进电机115由控制器控制;穴盘提升机构200的双向气缸202经换向阀与气泵连接,换向阀由控制器控制。
30.作为一个更优选实施例,机架101设有四个支脚102。
31.作为一个更优选实施例,轴承座一104固定在连接板103上,连接板103开设的调节槽与机架101开设的通孔通过螺栓和螺母连接,通过连接板103的调节槽调节螺栓连接板103在机架101上的位置,能实现输送带107的张紧调整。
32.作为一个更优选实施例,机架101的两侧均固定有挡板109,防止穴盘108(如图5所示)在输送过程中偏移。
33.作为一个优选实施例,穴盘收集机构300还包括固定在收集架顶部的光电传感器106;穴盘收集机构300的光电传感器106信号输出端与控制器连接;当光电传感器106检测到穴盘108收集达到极限后,控制器控制报警器报警(优选地,报警三声后自动停止)。
34.各实施例均具备的情况下,该育苗穴盘自动堆叠装置的工作原理如下:
35.1、输送机构100输送穴盘108;当输送机构100的光电传感器106检测到穴盘108到位后,步进电机115停转,此时穴盘108的边沿位于可回转翻板208上方;然后,双向气缸202的推杆203缩回,并经连杆204带动l型杆205连接有可回转翻板208的一端上摆,从而带动可回转翻板208上升,可回转翻板208与穴盘108接触时(如图6所示)推动穴盘108上升;双向气
缸202的推杆203完全缩回时,步进电机115启动,等到输送机构100的光电传感器106检测到下一个穴盘108到位后,步进电机115停转,如图7所示;接着,双向气缸202的推杆203伸出,并经连杆204带动l型杆205连接有可回转翻板208的一端下摆,可回转翻板208带动其上的穴盘108下降并插入传送带上的穴盘108中,可回转翻板208下降至与传送带上穴盘108接触时向外侧翻转,如图8所示。双向气缸202的推杆203继续伸出时,可回转翻板208上的穴盘108完全插入传送带上的穴盘108中,可回转翻板208继续下降到低于传送带上的穴盘108边沿后,在扭簧的回复力作用下向内翻转复位,如图9所示。
36.2、重复步骤1,直到穴盘收集机构300的光电传感器106检测到穴盘108后,步进电机115和双向气缸202均停止运动,且双向气缸202复位到推杆203完全推出状态,报警器报警;然后,拉开两块可移动立板301,将堆叠厚的穴盘108取出。
37.以上内容是结合具体的实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。