1.本发明涉及高空作业设备技术领域,具体涉及一种设有安全防护系统的智能高空作业平台。
背景技术:
2.随着我国城市建设的快速发展与大规模需求,大型建筑越来越多。在对这些大型建筑施工时,往往需要借助高空作业平台来完成工作。高空作业平台是一种先进的高空作业机械,其具有灵活的移动性以及更广阔的活动空间,因此能够大大提高空中施工人员的工作效率,并降低劳动强度。工作人员在高空作业平台工作时,可能会因为各种意味导致安全隐患,比如意外滑倒,很可能会导致人体跌至工作台外,现有的高空作业平台的作业台结构简单,往往是工作台的周围设置一些围栏,安全性差,不能在工作人员发生意外情况时及时进行防护,难以避免高空作业时发生的安全事故。
技术实现要素:
3.本发明的目的是针对现有技术的不足,提供一种设有安全防护系统的智能高空作业平台,具体方案如下:一种设有安全防护系统的智能高空作业平台,包括车体,所述车体的四个角设有液压支腿,车体上设有转台,所述转台由驱动机构驱动其转动,转台上设有支撑座,所述支撑座上铰接设有第一板架,支撑座上还设有控制所述第一板架倾斜角度的第一液压杆,第一板架的自由端铰接设有第二板架,第一板架上设有控制所述第二板架倾斜角度的第二液压杆,第二板架的端部固设有工作台;所述工作台包括底壳,所述底壳内设有踏板,所述踏板座设在压力传感器上,底壳内还设有安全绳,所述安全绳绕设在设置在底壳内的收放装置内,安全绳的自由端设有锁定装置,底壳上部通过多根栏杆连接有围板,所述围板上沿周向设有多个雷达探测器,底壳下部设有多个用来与第二板架固定安装在一起的安装脚;所述底壳内还设有倾角传感器;所述工作台的外部设有多个安全气囊;所述液压支腿、驱动机构、第一液压杆、第二液压杆、压力传感器、雷达探测器、锁定装置、倾角传感器以及安全气囊均与设置在底壳内的控制器电性连接。
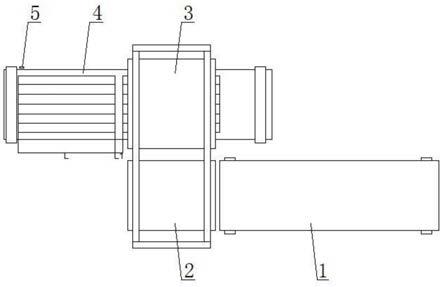
4.基于上述,所述车体包括前段、后段,前段设有收纳槽,后段设有滑动安装在所述收纳槽内的渡板;前段的底部通过转动架转动设有丝杠,所述丝杠由设置在前段底部的驱动电机驱动其转动,后段的底部设有固定板,所述丝杠与所述固定板螺接。
5.基于上述,所述第二板架的端部还设有与所述控制器电性连接的红外报警器。
6.基于上述,所述工作台的外围设有缓冲气囊。
7.本发明相对现有技术具有突出的实质性特点和显著的进步,具体地说,本发明具有以下优点:1、本发明中,通过对工作台从使用时的承载能力、障碍物的规避、对工作人员的安
全防护、工作台的平稳性以及发生意外时的安全防护等方面进行综合考虑设计,能够确保作业人员在高空作业时的人身安全。
8.2、本发明中,通过在工作台的外围设置缓冲气囊,此结构设计使得工作台在一些不得不与某些物体接触的情况下起到缓冲保护作用。
9.3、本发明中,通过在第二板架的端部设置与控制器电性连接的红外报警器,此结构设计便于对工作台下方是否有人进行实时监测,避免因高空坠物出现伤人事件。
10.4、本发明中,车体包括前段、后段,前段设有收纳槽,后段设有滑动安装在所述收纳槽内的渡板;前段的底部通过转动架转动设有丝杠,所述丝杠由设置在前段底部的驱动电机驱动其转动,后段的底部设有固定板,所述丝杠与所述固定板螺接,此结构设计使得车体可以根据实际使用需要对车体尺寸进行灵活调节,有效提升高空作业平台的适用性。
附图说明
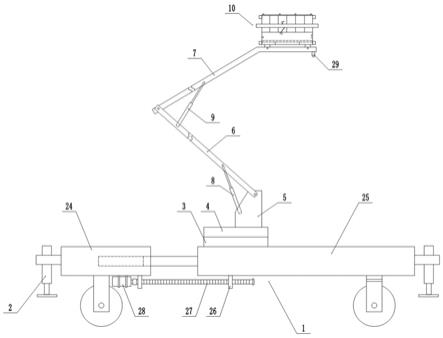
11.图1是本发明的整体结构示意图。
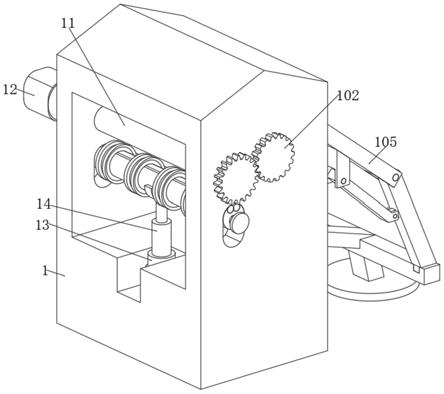
12.图2是本发明中工作台的结构示意图。
13.图3是本发明中工作台的俯视图。
14.图中:1.车体;2.液压支腿;3.驱动机构;4.转台;5.支撑座;6.第一板架;7.第二板架;8.第一液压杆;9.第二液压杆;10.工作台;11.底壳;12.安装脚;13.踏板;14.压力传感器;15.栏杆;16.围板;17.缓冲气囊;18.倾角传感器;19.安全气囊;20.安全绳;21.锁定装置;22.收放装置;23.雷达探测器;24.前段;25.后段;26.固定板;27.丝杠;28.驱动电机;29.红外报警器;30.控制器。
具体实施方式
15.下面通过具体实施方式,对本发明的技术方案做进一步的详细描述。
实施例
16.如图1
‑
3所示,本发明提供一种设有安全防护系统的智能高空作业平台,包括车体1,所述车体1的四个角设有液压支腿2,车体1上设有转台4,所述转台4由驱动机构3驱动其转动,转台4上设有支撑座5,所述支撑座5上铰接设有第一板架6,支撑座5上还设有控制所述第一板架6倾斜角度的第一液压杆8,第一板架6的自由端铰接设有第二板架7,第一板架6上设有控制所述第二板架7倾斜角度的第二液压杆9,第二板架7的端部固设有工作台10。
17.所述工作台10包括底壳11,所述底壳11内设有踏板13,所述踏板13座设在压力传感器14上,底壳11内还设有安全绳20,所述安全绳20绕设在设置在底壳11内的收放装置22内,安全绳20的自由端设有锁定装置21,底壳11上部通过多根栏杆15连接有围板16,所述围板16上沿周向设有多个雷达探测器23,底壳11下部设有多个用来与第二板架7固定安装在一起的安装脚12。
18.考虑到作业人员在工作台10上作业过程中,工作台10可能会出现倾斜现象,若不能及时发现,则可能会出现意外情况,所以为便于对工作台10的水平程度进行实时监测,在底壳11内还设有倾角传感器18。
19.考虑到车体1侧翻以及工作台10发生坠落的风险,为确保设备及人员安全,在工作
台10的外部设有多个安全气囊19。
20.为便于对整个高空作业平台10进行操控,上述液压支腿2、驱动机构3、第一液压杆8、第二液压杆9、压力传感器14、雷达探测器23、锁定装置21、倾角传感器18以及安全气囊19均与设置在底壳11内的控制器30电性连接。
21.考虑到实际使用场地对车体1尺寸会有要求,为提高高空作业平台的适用性,需要对车体1尺寸进行调节,故而所述车体1包括前段24、后段25,前段24设有收纳槽,后段25设有滑动安装在所述收纳槽内的渡板。前段24的底部通过转动架转动设有丝杠27,所述丝杠27由设置在前段24底部的驱动电机28驱动其转动,后段25的底部设有固定板26,所述丝杠27与所述固定板26螺接。
22.考虑到高空作业平台10在工作的过程中,存在高空坠物的可能性,为避免高空坠物伤人事件的发生,在第二板架7的端部还设有与控制器30电性连接的红外报警器29。
23.考虑到高空作业平台在使用的过程中,工作台10不可避免的会与一些物体接触,为对工作台10起到一个缓冲保护作用,在工作台10的外围设有缓冲气囊17。
24.本发明具体工作原理:首先,根据实际使用场地调整车体1尺寸,然后作业人员进入工作台10,并将安全绳20固定在自己身上,通过锁定装置21进行锁定,接着作业人员通过控制器30使得液压支腿2支撑在地面对车体1进行固定,然后控制工作台10达到相应的工作位置进行工作。
25.当红外报警器29发出警报时,控制器30关闭所有运行机构;当雷达探测器23发出警报时,作业人员根据实际情况对工作台10的所处位置进行调整。
26.当水平仪监测到工作台10处于不平衡状态时,控制器30发出提示,作业人员根据实际情况调整液压支腿2或调整第一液压杆8、第二液压杆9以使工作台10处于水平位置。
27.当工作台10发生严重侧倾时,即水平仪所测工作平台的倾斜角度超过30
°
时,为确保设备及作业人员的人身安全,控制器30打开安全气囊19,收放装置22将安全绳20收紧至对作业人员安全的长度。
28.当工作台10发生坠落时,即压力传感器14监测到工作台10处于失重状态时,控制器30打开安全气囊19,收放装置22将安全绳20收紧至对作业人员安全的长度。
29.需要说明的是,本发明中所提到的工作台10并不局限于本实施例中所提到的场景,其可以适用于任何类似的高空作业设备当中。
30.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制;尽管参照较佳实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者对部分技术特征进行等同替换;而不脱离本发明技术方案的精神,其均应涵盖在本发明请求保护的技术方案范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。