用于下肢骨折断骨前后畸形的复位系统
1.本分案申请的原申请号为:202010159773.x,申请日为:2020年03月10日,发明名称为:一种下肢骨折复位系统。
技术领域
2.本发明涉及骨折治疗技术领域,尤其涉及用于下肢骨折断骨前后畸形的复位系统。
背景技术:
3.骨折是骨外科的常见病症,在对骨折部位进行永久固定前,需要对骨折部位进行复位,恢复下肢长度,并进行前后成角畸形、侧向成角畸形、旋转畸形的纠正。
4.传统的长骨骨折复位方法是在直视环境下,医生凭借经验和技巧切开复位,但是切开复位方法容易破坏骨折周围的血运和软组织,术中时间长,出血多、易感染。
5.在专利us9524581,us5728095和ep2767252提出的骨折复位方法可具化为如下流程:首先,拍摄含有完整外固定支架的骨折部位的x射线正位片和侧位片;其次,在x射线影像上手工测量骨折断端间的位姿参数、骨块与外固定支架间的安装参数,并读取外固定支架各个支链的长度;进而,将数据输入至计算机系统,使用一定的算法求解各支链驱动关节的调节方案,形成电子处方;最后,依据电子处方调节外固定支架六条支链的长度,实现骨折断端的复位。
6.该复位方法存在如下不足:1)无法标准化x射线影像的拍摄角度、拍摄距离和患者肢体摆放等因素,评估结果存在误差,复位效果不理想;2)手工测量x射线影像时,存在多种主、客观误差;3)x射线正位片和侧位片不能反映骨折断端绕轴线的旋转畸形,还需凭借医生的经验进行操作,否则复位不完全,恢复后肢体活动受阻。
技术实现要素:
7.本发明所要解决的技术问题是提供一种利用健侧影像做参照,逆向评估骨折畸形,以提高评估及复位的准确性,保证术后肢体具有良好恢复的下肢骨折复位系统。
8.为解决上述技术问题,本发明所采取的技术方案是:
9.复位系统包括:
10.用于术前评估的c臂机和计算机
11.患者朝上平躺,c臂机透视手术节段正位片,及与手术节段对称的健侧的正位片,并传输至计算机操作界面内,定义前、后、内、外四个方向;
12.计算机开始进形各参数评估
13.(1)断骨长度移位的评估
14.(1.1)根据既定要素a,计算机于手术节段正位片上评估两节断骨是否存在长度方向上的移位;
15.(2)断骨侧向畸形的评估
16.(2.1)于健侧建立对照基准,根据既定要素b,计算机于健侧的正位片上获取能够评估断骨是否侧成角畸形的参考值k1以及断骨是否侧向移位的参考值k2;
17.(2.2)根据既定要素b,计算机于手术节段正位片上获取与参考值k1、k2相对的实际值k1’、k2’;
18.(2.3)在计算机操作界面内将实际值与参考值进行比较,并生成结果,如k1’与k1的差值大于允许的误差值,则评估断骨存在侧向成角畸形,如k2’与k2的差值大于允许的误差值,则评估断骨存在侧向移位,否则不存在侧向畸形;
19.(2.4)如存在侧向成角畸形和/或侧向移位,根据既定要素b1,计算机评估向内或向外成角和/或移位;
20.该系统还包括用于术中复位的下肢牵引装置;
21.(1.2)如断骨存在长度方向上的移位,则下肢牵引装置进行牵拉复位操作;
22.(2.5)如断骨存在侧向畸形,则下肢牵引装置对断骨侧向畸形进行复位操作;
23.通过c臂机、计算机和下肢牵引装置再次评估
24.重复术前评估(1)和(2),重新评估复位后的手术节段是否还存在断骨长度移位、及断骨侧向畸形,如是,则重复术中复位(1.2)和(2.5)的操作,直至恢复下肢长度、及内侧或外侧畸形被纠正。
25.进一步的技术方案在于,术前评估还包括:
26.患者朝上平躺,c臂机透视手术节段侧位片,及与手术节段对称的健侧的侧位片,并传输至计算机操作界面内,定义前、后、内、外四个方向;
27.(3)断骨前后畸形的评估
28.(3.1)于健侧建立对照基准,根据既定要素c,计算机于健侧的侧位片上获取能够评估断骨是否前后成角畸形的参考值k3以及断骨是否前后移位的参考值k4;
29.(3.2)根据既定要素c,计算机于手术节段侧位片上获取与参考值k3、k4相对的实际值k3’、k4’;
30.(3.3)在计算机操作界面内将实际值与参考值进行比较,并生成结果,如k3’与k3的差值大于允许的误差值,则评估断骨存在前后成角畸形,如k4’与k4的差值大于允许的误差值,则评估断骨存在前后移位,否则不存在前后畸形;
31.(3.4)如存在前后成角畸形和/或前后移位,根据既定要素c1,计算机评估向前或向后成角和/或移位;
32.术中复位还包括:
33.(3.5)如断骨存在前后畸形,则对断骨前后畸形进行复位操作;
34.再次评估还包括:
35.重复术前评估(3),重新评估复位后的手术节段是否还存在前后畸形,则重复术中复位(3.5)的操作,直至前或后畸形被纠正。
36.进一步的技术方案在于,术前评估还包括:
37.(4)断骨旋转畸形的评估
38.(4.1)健侧建立对照基准,根据既定要素d,计算机于健侧的正位片上获取至少一个能评估断骨是否旋转畸形的参考值k5;
39.(4.2)根据既定要素d,计算机于手术节段正位片上获取与参考值k5相对的实际值
k5’;
40.(4.3)在计算机操作界面内将实际值与参考值进行比较,并生成结果,如k5’与k5的差值大于允许的误差值,则评估断骨存在旋转畸形,否则不存在;
41.(4.4)如存在旋转畸形,可默认远端存在旋转畸形,并根据脚尖的指向判断内旋或外旋畸形;
42.术中复位还包括:
43.(4.5)如断骨存在旋转畸形,则进行内旋或外旋畸形复位操作;
44.再次评估还包括:
45.重复术前评估(4),重新评估复位后的手术节段是否还存在旋转畸形,则重复术中复位(4.5)的操作,直至内旋或外旋移位被纠正。
46.进一步的技术方案在于,所述断骨旋转畸形的评估方法还包括或替换为:
47.在c臂机透视手术节段正位片上获取断骨近端的骨折线内侧端点与断骨远端的骨折线内侧端点之间的距离值l
内
,获取断骨近端的骨折线外侧端点与断骨远端的骨折线外侧端点之间的距离值l
外
,并生成结果,当l
内
≠l
外
时,则评估断骨存在旋转畸形,否则不存在。
48.进一步的技术方案在于,既定要素a包含的评估两节断骨存在长度方向上的移位的方法包括:
49.近端断骨的远端与远端断骨的近端之间是否存在断口;及
50.近端断骨的远端是否远于远端断骨的近端。
51.进一步的技术方案在于,既定要素b包含的获取参考值k1、k2的方法包括:
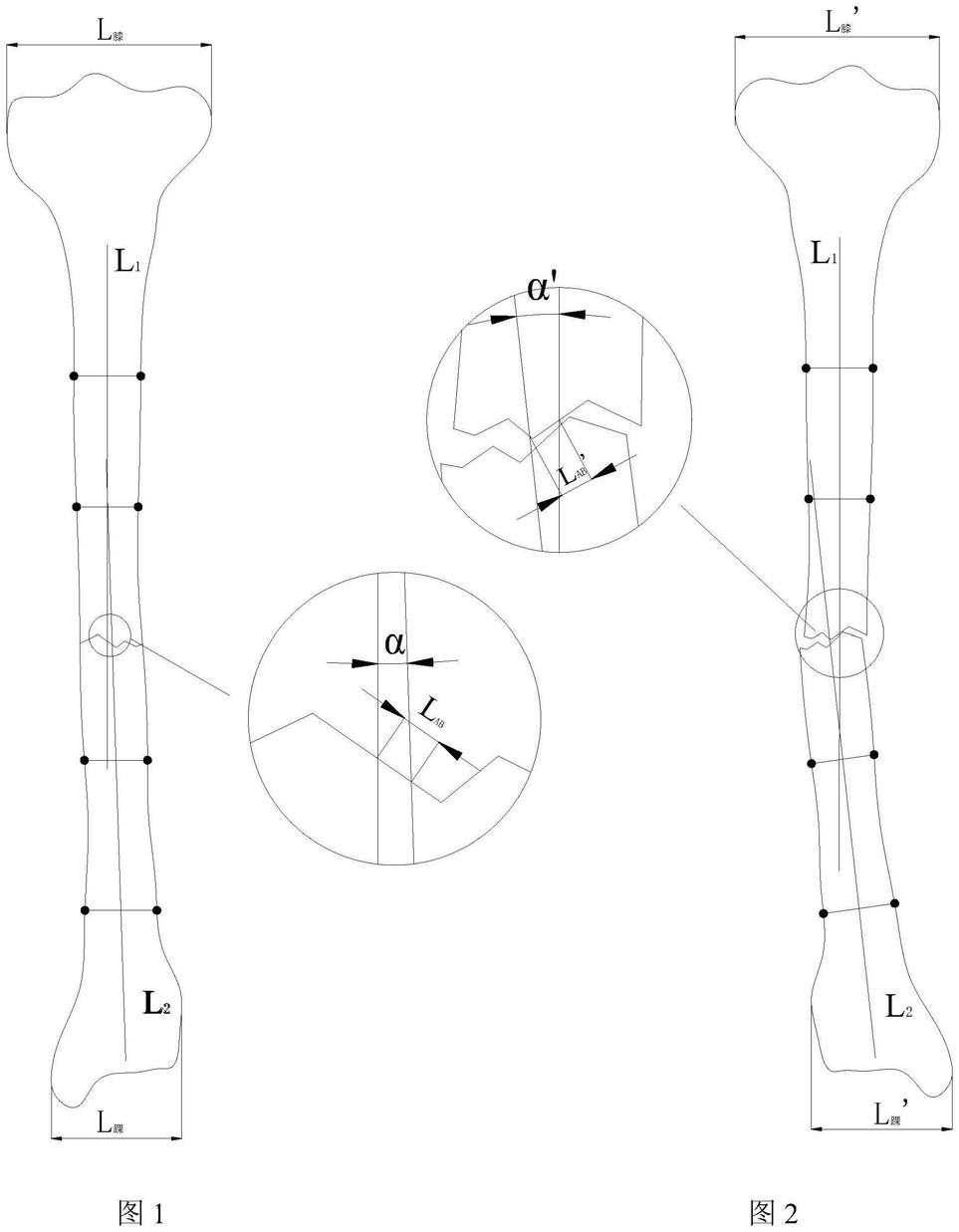
52.于c臂机透视与手术节段对称的健侧的正位片上,作出健侧近端骨正向的中轴线l1,及健侧远端骨正向的中轴线l2,l1与l2相交夹角α记做参考值k1,l1与l2交于骨折线的两点间的距离l
ab
记做参考值k2;
53.既定要素b包含的获取实际值k1’、k2’的方法包括:
54.于c臂机透视手术节段正位片上,作出术侧近端骨正向的中轴线l1’
,及术侧远端骨正向的中轴线l2’
,l1’
与l2’
相交夹角α’记做实际值k1’,l1’
与l2’
交于骨折线的两点间的距离l
ab’记做实际值k2’;其中
55.中轴线通过以下方法得到:
56.于健侧,在每端骨的正向上横向作出两条连接骨两侧边缘的标记线,取两条标记线的中点相连得到该端骨的中轴线;并且于术侧,将健侧标有中轴线的正位片镜像至术侧的正位片上,并对健侧正位片进行第一次旋转,使健侧近端与术侧近端重合,此时l1的位置即为l1’
,然后对健侧正位片进行第二次旋转,使健侧远端与术侧远端重合,此时l2的位置即为l2’
。
57.进一步的技术方案在于,生成的结果中,当k1
’‑
k1>2
°
时,则评估断骨存在侧向成角畸形;当k2
’‑
k2>2mm则评估断骨存在侧向移位。
58.进一步的技术方案在于,既定要素b1的判定标准为,如远端中轴线l2’
的近端位于l1’
的内侧,则为向内成角或移位,如远端中轴线l2’
的近端位于l1’
的外侧,则为向外成角或移位。
59.进一步的技术方案在于,既定要素c包含的获取参考值k3、k4的方法包括:
60.于c臂机透视与手术节段对称的健侧的侧位片上,作出健侧近端骨侧向的中轴线
l3,及健侧远端骨侧向的中轴线l4,l3与l4相交夹角β记做参考值k3,l3与l4交于骨折线的两点间的距离l
cd
记做参考值k4;
61.既定要素c包含的获取实际值k3’、k4’的方法包括:
62.于c臂机透视手术节段侧位片上,作出术侧近端骨侧向的中轴线l3’
,及术侧远端骨侧向的中轴线l4’
,l3’与l4’
相交夹角β’记做实际值k3’,l3’
与l4’
交于骨折线的两点间的距离l
cd’记做实际值k4’;其中
63.中轴线通过以下方法得到:
64.于健侧,在每端骨的侧向上横向作出两条连接骨两侧边缘的标记线,取两条标记线的中点相连得到该端骨的中轴线;并且
65.于术侧,将健侧标有中轴线的侧位片镜像至术侧的侧位片上,并对健侧侧位片进行第一次旋转,使健侧近端与术侧近端重合,此时l3的位置即为l3’
,然后对健侧侧位片进行第二次旋转,使健侧远端与术侧远端重合,此时l4的位置即为l4’
。
66.进一步的技术方案在于,生成的结果中,当k3
’‑
k3>2
°
时,则评估断骨存在前后成角畸形;当k4
’‑
k4>2mm则评估断骨存在前后移位。
67.进一步的技术方案在于,既定要素c1的判定标准为,如远端中轴线l4’
的近端位于l3’
的前侧,则为向前成角或移位,如远端中轴线l4’
的近端位于l3’
的后侧,则为向后成角或移位。
68.进一步的技术方案在于,既定要素d包含的获取能评估断骨是否旋转畸形的参考值k5的方法包括:
69.于c臂机透视与手术节段对称的健侧的正位片上,获取健侧膝关节宽度的最大值l
膝
、及踝关节宽度的最大值l
踝
;
70.既定要素d包含的获取与参考值相对的实际值k5’的方法包括:
71.于c臂机透视手术节段侧位片上,获取术侧膝关节宽度的最大值l
膝’、及踝关节宽度的最大值l
踝’;
72.生成的结果中,当l
膝’≠l
膝
时,则近端断骨存在旋转畸形,当l
踝’≠l
踝
时,则远端断骨存在旋转畸形。
73.采用上述技术方案所产生的有益效果在于:
74.该下肢骨折复位系统,在评估骨折畸形时利用患者健侧影像建立对照标准,逆向评估骨折畸形,不设定统一的参考标准,而是以患者自身的健侧作为参考标准,因人而异,更复合每一名患者的自身情况,不受x射线影像的拍摄角度、拍摄距离和患者肢体摆放等因素的影响,并通过计算机进行计算分析评估,进一步提高了评估及复位的准确性,能够保证术后肢体具有良好的恢复,两侧肢体对称。
附图说明
75.图1是c臂机透视与手术节段对称的健侧的正位片;
76.图2是c臂机透视手术节段的正位片;
77.图3是c臂机透视与手术节段对称的健侧的侧位片;
78.图4是c臂机透视手术节段的正位片;
79.图5是手术节段正位片中骨折线部分的示意图。
具体实施方式
80.下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
81.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
82.实施例一
83.如图1~5所示,一种下肢骨折复位系统,可用于肢体初期的长度复位,以及侧向畸形的复位,其操作方法包括术前评估、术中复位及复位后的再次评估校正。
84.患者朝上平躺,c臂机透视手术节段正位片,及与手术节段对称的健侧的正位片,并传输至计算机操作界面内,定义前、后、内、外四个方向。
85.术前对断骨长度移位的评估
86.(1.1)根据既定要素a,计算机于手术节段正位片上评估两节断骨是否存在长度方向上的移位。
87.既定要素a包含的评估两节断骨存在长度方向上的移位的方法包括:
88.近端断骨的远端与远端断骨的近端之间是否存在断口;及
89.近端断骨的远端是否远于远端断骨的近端。
90.术前对断骨侧向畸形的评估,包含侧向成角畸形和侧向移位的评估:
91.(2.1)于健侧建立对照基准,根据既定要素b,计算机于健侧的正位片上获取能够评估断骨是否侧成角畸形的参考值k1以及断骨是否侧向移位的参考值k2;
92.(2.2)根据既定要素b,计算机于手术节段正位片上获取与参考值k1、k2相对的实际值k1’、k2’;
93.(2.3)在计算机操作界面内将实际值与参考值进行比较,并生成结果,如k1’与k1的差值大于允许的误差值,则评估断骨存在侧向成角畸形,如k2’与k2的差值大于允许的误差值,则评估断骨存在侧向移位,否则不存在侧向畸形;
94.(2.4)如存在侧向成角畸形和/或侧向移位,根据既定要素b1,计算机评估向内或向外成角和/或移位。
95.既定要素b包含的获取参考值k1、k2的方法包括:
96.于c臂机透视与手术节段对称的健侧的正位片上,作出健侧近端骨正向的中轴线l1,及健侧远端骨正向的中轴线l2,l1与l2相交夹角α记做参考值k1,l1与l2交于骨折线的两点间的距离l
ab
记做参考值k2。
97.既定要素b包含的获取实际值k1’、k2’的方法包括:
98.于c臂机透视手术节段正位片上,作出术侧近端骨正向的中轴线l1’
,及术侧远端骨正向的中轴线l2’
,l1’
与l2’
相交夹角α’记做实际值k1’,l1’
与l2’
交于骨折线的两点间的距离l
ab’记做实际值k2’。
99.中轴线通过以下方法得到:
100.于健侧,在每端骨的正向上横向作出两条连接骨两侧边缘的标记线,取两条标记
线的中点相连得到该端骨的中轴线;并且于术侧,将健侧标有中轴线的正位片镜像至术侧的正位片上,并对健侧正位片进行第一次旋转,使健侧近端与术侧近端重合,此时l1的位置即为l1’
,然后对健侧正位片进行第二次旋转,使健侧远端与术侧远端重合,此时l2的位置即为l2’
。
101.术侧的中轴线利用健侧中轴线的影像在术侧的相同位置作出,保证两次作出的中轴线于骨上的位置相同,保证对比的可行性。
102.步骤(2.3)生成的结果中,当k1
’‑
k1>2
°
时,则评估断骨存在侧向成角畸形;当k2
’‑
k2>2mm则评估断骨存在侧向移位。
103.既定要素b1的判定标准为,如远端中轴线l2’
的近端位于l1’
的内侧,则为向内成角或移位,如远端中轴线l2’
的近端位于l1’
的外侧,则为向外成角或移位。
104.术中复位包括如下操作:
105.(1.2)如断骨存在长度方向上的移位,则进行牵拉复位操作;
106.(2.5)如断骨存在侧向畸形,则对断骨侧向畸形进行复位操作。复位时先对断骨远端进行复位,如复位不成功再对断骨近端进行复位。
107.重复术前评估(1)和(2),重新评估复位后的手术节段是否还存在断骨长度移位、及断骨侧向畸形,如是,则重复术中复位(1.2)和(2.5)的操作,直至恢复下肢长度、及内侧或外侧畸形被纠正。
108.该下肢骨折复位方法,在评估骨折畸形时利用患者健侧影像建立对照标准,逆向评估骨折畸形,不设定统一的参考标准,而是以患者自身的健侧作为参考标准,因人而异,更复合每一名患者的自身情况,不受x射线影像的拍摄角度、拍摄距离和患者肢体摆放等因素的影响,并通过计算机进行计算分析评估,进一步提高了评估及复位的准确性,能够保证术后肢体具有良好的恢复,两侧肢体对称。
109.实施例二
110.肢体骨折后还可能存在前后畸形,因此该骨折复位系统还包括对断骨前后畸形的评估和纠正,用于下肢骨折断骨前后畸形的复位。该方法同样包括包括术前评估、术中复位及复位后的再次评估校正。
111.术前评估包括对断骨前后畸形的评估,具体包含前后成角畸形和前后移位的评估,操作步骤包括:
112.患者朝上平躺,c臂机透视手术节段侧位片,及与手术节段对称的健侧的侧位片,并传输至计算机操作界面内,定义前、后、内、外四个方向;
113.(3)断骨前后畸形的评估
114.(3.1)于健侧建立对照基准,根据既定要素c,计算机于健侧的侧位片上获取能够评估断骨是否前后成角畸形的参考值k3以及断骨是否前后移位的参考值k4;
115.(3.2)根据既定要素c,计算机于手术节段侧位片上获取与参考值k3、k4相对的实际值k3’、k4’;
116.(3.3)在计算机操作界面内将实际值与参考值进行比较,并生成结果,如k3’与k3的差值大于允许的误差值,则评估断骨存在前后成角畸形,如k4’与k4的差值大于允许的误差值,则评估断骨存在前后移位,否则不存在前后畸形;
117.(3.4)如存在前后成角畸形和/或前后移位,根据既定要素c1,计算机评估向前或
向后成角和/或移位。
118.既定要素c包含的获取参考值k3、k4的方法包括:
119.于c臂机透视与手术节段对称的健侧的侧位片上,作出健侧近端骨侧向的中轴线l3,及健侧远端骨侧向的中轴线l4,l3与l4相交夹角β记做参考值k3,l3与l4交于骨折线的两点间的距离l
cd
记做参考值k4。
120.既定要素c包含的获取实际值k3’、k4’的方法包括:
121.于c臂机透视手术节段侧位片上,作出术侧近端骨侧向的中轴线l3’
,及术侧远端骨侧向的中轴线l4’
,l3’与l4’
相交夹角β’记做实际值k3’,l3’
与l4’
交于骨折线的两点间的距离l
cd’记做实际值k4’。
122.中轴线通过以下方法得到:
123.于健侧,在每端骨的侧向上横向作出两条连接骨两侧边缘的标记线,取两条标记线的中点相连得到该端骨的中轴线;并且
124.于术侧,将健侧标有中轴线的侧位片镜像至术侧的侧位片上,并对健侧侧位片进行第一次旋转,使健侧近端与术侧近端重合,此时l3的位置即为l3’
,然后对健侧侧位片进行第二次旋转,使健侧远端与术侧远端重合,此时l4的位置即为l4’
。
125.步骤(3.3)中生成的结果中,当k3
’‑
k3>2
°
时,则评估断骨存在前后成角畸形;当k4
’‑
k4>2mm则评估断骨存在前后移位。
126.既定要素c1的判定标准为,如远端中轴线l4’
的近端位于l3’
的前侧,则为向前成角或移位,如远端中轴线l4’
的近端位于l3’
的后侧,则为向后成角或移位。
127.术中复位包括:
128.(3.5)如断骨存在前后畸形,则对断骨前后畸形进行复位操作。复位时,先对断骨远端进行复位,如复位不成功再对近端进行复位。
129.再次评估包括:
130.重复术前评估(3),重新评估复位后的手术节段是否还存在前后畸形,则重复术中复位(3.5)的操作,直至前或后畸形被纠正。
131.实施例三
132.肢体骨折后还可能存在旋转畸形,因此该骨折复位系统还包括对断骨旋转畸形的评估和纠正。该方法同样包括包括术前评估、术中复位及复位后的再次评估校正。
133.术前评估包括对断骨旋转畸形的评估,操作步骤包括:
134.(4.1)健侧建立对照基准,根据既定要素d,计算机于健侧的正位片上获取至少一个能评估断骨是否旋转畸形的参考值k5;
135.(4.2)根据既定要素d,计算机于手术节段正位片上获取与参考值k5相对的实际值k5’;
136.(4.3)在计算机操作界面内将实际值与参考值进行比较,并生成结果,如k5’与k5的差值大于允许的误差值,则评估断骨存在旋转畸形,否则不存在;
137.(4.4)如存在旋转畸形,可默认远端存在旋转畸形,并根据脚尖的指向判断内旋或外旋畸形。
138.既定要素d包含的获取能评估断骨是否旋转畸形的参考值的方法包括:
139.于c臂机透视与手术节段对称的健侧的正位片上,获取健侧膝关节宽度的最大值
l
膝
、及踝关节宽度的最大值l
踝
;
140.既定要素d包含的获取与参考值相对的实际值的方法包括:
141.于c臂机透视手术节段侧位片上,获取术侧膝关节宽度的最大值l
膝’、及踝关节宽度的最大值l
踝’;
142.生成的结果中,当l
膝’≠l
膝
时,则近端断骨存在旋转畸形,当l
踝’≠l
踝
时,则远端断骨存在旋转畸形。
143.术中复位包括:
144.(4.5)如断骨存在旋转畸形,则进行内旋或外旋畸形复位操作。复位时,先对断骨远端进行复位,如复位不成功再对近端进行复位。
145.再次评估包括:
146.重复术前评估(4),重新评估复位后的手术节段是否还存在前后成角畸形,则重复术中复位(4.5)的操作,直至内旋或外旋移位被纠正。
147.实施例四
148.基于实施例三的基础上,断骨旋转畸形的评估方法还包括或替换为:
149.计算机在c臂机透视手术节段正位片上获取断骨近端的骨折线内侧端点与断骨远端的骨折线内侧端点之间的距离值l
内
,获取断骨近端的骨折线外侧端点与断骨远端的骨折线外侧端点之间的距离值l
外
,并生成结果,当l
内
≠l
外
时,则评估断骨存在旋转畸形,否则不存在。
150.根据公开的任一实施例中,在术中复位时,可使用本技术人在中国发明专利申请cn201910832613.4中记载的下肢牵引装置进行牵拉复位、顶推复位等。且复位时,利用健侧影像,先逆向复位骨折远端,如逆向复位骨折远端不成功,再逆向复位骨折近端。
151.以上仅是本发明的较佳实施例,任何人根据本发明的内容对本发明作出的些许的简单修改、变形及等同替换均落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。