1.本实用新型涉及数控加工中心领域,尤指一种三位五轴数控加工中心。
背景技术:
2.五轴数控加工中心在家具生产中主要针对一些比较复杂,人工很难加工的家具配件。目前市场上所有五轴数控加工中心都是单五轴生产,即每次只能加工一个产品,因此加工效率低下。
3.专利申请号cn201620040895.6公开了一种结构稳定的门型五轴数控加工中心,包括底座、门桥、工作台、滑座、机头,所述门桥包括设于底座上的两个立柱和连接两立柱的桥体;所述工作台包括工作台底座和与工作台底座可转动连接的摇篮,所述工作台底座上设有驱动摇篮转动的摇篮电机,所述摇篮绕x向轴转动;所述底座的一侧设有旋转刀库;所述x向导轨、y向导轨和z向导轨均为线性滚柱直线导轨。
4.该门型五轴数控加工中心只有一个加工位,每次只能加工一个产品,因此加工效率低下。
技术实现要素:
5.本实用新型的主要目的在于提供一种三位五轴数控加工中心,其采用三组刀具同时加工的形式,有效的解决了五轴数控加工中心加工效率低下的问题。
6.为实现上述目的,本实用新型采用的技术方案是:
7.一种三位五轴数控加工中心,包含:门桥、机座、z轴横梁、配重链条和配重气缸,所述门桥包括设于机座上的两根立柱和连接两立柱的桥体,两所述立柱均设有z轴移动组件,所述z轴横梁连接于两所述z轴移动组件的输出端上,所述配重气缸设置在所述门桥的外侧,所述配重链条的一端与所述配重气缸的输出端连接,所述配重链条的另一端与所述z轴横梁连接;
8.所述z轴横梁设有x轴移动组件,所述x轴移动组件包括x轴伺服电机、x轴导轨和ab轴安装梁,所述x轴伺服电机和x轴导轨设置在所述z轴横梁上,所述ab轴安装梁滑动设置在所述x轴导轨上,所述ab轴安装梁设有三套ab轴刀具组件;
9.所述机座设有y轴工作台,所述y轴工作台设有与所述ab轴刀具组件相对应的真空吸附台。
10.进一步,所述ab轴刀具组件包括a轴伺服电机、a轴rv减速机、b轴伺服电机、b轴rv减速机、ab轴机体和刀具本体,所述ab轴机体设有带高速电机的高速电机安装座,所述刀具本体与高速电机连接;
11.所述a轴伺服电机驱动所述a轴rv减速机带动所述ab轴机体转动,所述b轴伺服电机驱动所述b轴rv减速机带动所述高速电机安装座转动,进而实现刀具本体的旋转动作。
12.进一步,所述z轴移动组件包括z轴伺服电机、z轴螺杆和z轴导轨,所述z轴导轨设置在所述立柱上,所述z轴横梁滑动设置在所述z轴导轨上。
13.进一步,所述机座设有y轴导轨,所述y轴工作台滑动设置在所述y轴导轨上。
14.本实用新型的有益效果在于:
15.本实用新型包含:门桥、机座、z轴横梁、配重链条和配重气缸,所述z轴横梁设有x轴移动组件,所述x轴移动组件包括ab轴安装梁,所述ab轴安装梁设有三套ab轴刀具组件;三套ab轴刀具组件同时加工工件,相同时间内加工工件的数量是传统机型的3倍;加工效率高。
16.本实用新型可以同时加工三件工件,而传统机型同时加工三件工件则需要三台机器同时工作;与三台传统机型同时工作相比,本实用新型节约场地,节约调机时间。
附图说明
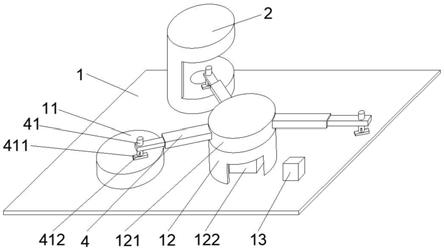
17.图1是本实用新型的结构示意图。
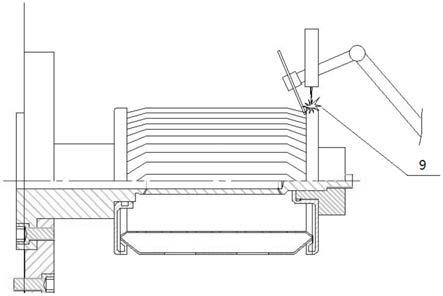
18.图2是本实用新型的主视图。
19.图3是本实用新型所述ab轴刀具组件的结构示意图。
20.附图标号说明:1.x轴伺服电机;2.z轴横梁;3.x轴导轨;4.真空吸附台;5.y轴工作台;6.机座;7.y轴导轨;8.立柱;9.配重气缸;10.z轴导轨;11.z轴螺杆;12.ab轴安装梁;13.ab轴刀具组件;14.桥体;15.a轴伺服电机;16.a轴rv减速机;17.ab轴机体;18.刀具本体;19.高速电机安装座;20.b轴伺服电机;21.b轴rv减速机。
具体实施方式
21.请参阅图1
‑
3所示,本实用新型关于一种三位五轴数控加工中心,包含:门桥、机座6、z轴横梁2、配重链条和配重气缸9,所述门桥包括设于机座6上的两根立柱8和连接两立柱8的桥体14,两所述立柱8均设有z轴移动组件,所述z轴横梁2连接于两所述z轴移动组件的输出端上,所述配重气缸9设置在所述门桥的外侧,所述配重链条的一端与所述配重气缸9的输出端连接,所述配重链条的另一端与所述z轴横梁2连接;
22.所述z轴横梁2设有x轴移动组件,所述x轴移动组件包括x轴伺服电机1、x轴导轨3和ab轴安装梁12,所述x轴伺服电机1和x轴导轨3设置在所述z轴横梁2上,所述ab轴安装梁12滑动设置在所述x轴导轨3上,所述ab轴安装梁12设有三套ab轴刀具组件13;
23.所述机座6设有y轴工作台5,所述y轴工作台5设有与所述ab轴刀具组件13相对应的真空吸附台4。
24.进一步地,所述ab轴刀具组件13包括a轴伺服电机15、a轴rv减速机16、b轴伺服电机20、b轴rv减速机21、ab轴机体17和刀具本体18,所述ab轴机体17设有带高速电机的高速电机安装座19,所述刀具本体18与高速电机连接;
25.所述a轴伺服电机15驱动所述a轴rv减速机16带动所述ab轴机体17转动,所述b轴伺服电机20驱动所述b轴rv减速机21带动所述高速电机安装座19转动,进而实现刀具本体18的旋转动作。
26.进一步地,所述z轴移动组件包括z轴伺服电机、z轴螺杆11和z轴导轨10,所述z轴导轨10设置在所述立柱8上,所述z轴横梁2滑动设置在所述z轴导轨10上。
27.进一步地,所述机座6设有y轴导轨7,所述y轴工作台5滑动设置在所述y轴导轨7上。
28.本实用新型的工作原理为:
29.所述z轴横梁2可以沿所述z轴导轨10上下移动,固定在所述ab轴安装梁12上的ab轴刀具组件13可以沿所述x轴导轨3左右移动,所述y轴工作台5可以沿所述y轴导轨7前后移动,所述a轴伺服电机15驱动所述a轴rv减速机16带动所述ab轴机体17转动,所述b轴伺服电机20驱动所述b轴rv减速机21带动所述高速电机安装座19转动;进而使刀具本体18做360度旋转动作,从而实现除工件固定点外的任何方位的加工。
30.以上实施方式仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通工程技术人员对本实用新型的技术方案作出的各种变形和改进,均应落入本实用新型的权利要求书确定的保护范围内。
技术特征:
1.一种三位五轴数控加工中心,其特征在于,包含:门桥、机座、z轴横梁、配重链条和配重气缸,所述门桥包括设于机座上的两根立柱和连接两立柱的桥体,两所述立柱均设有z轴移动组件,所述z轴横梁连接于两所述z轴移动组件的输出端上,所述配重气缸设置在所述门桥的外侧,所述配重链条的一端与所述配重气缸的输出端连接,所述配重链条的另一端与所述z轴横梁连接;所述z轴横梁设有x轴移动组件,所述x轴移动组件包括x轴伺服电机、x轴导轨和ab轴安装梁,所述x轴伺服电机和x轴导轨设置在所述z轴横梁上,所述ab轴安装梁滑动设置在所述x轴导轨上,所述ab轴安装梁设有三套ab轴刀具组件;所述机座设有y轴工作台,所述y轴工作台设有与所述ab轴刀具组件相对应的真空吸附台。2.根据权利要求1所述的三位五轴数控加工中心,其特征在于所述ab轴刀具组件包括a轴伺服电机、a轴rv减速机、b轴伺服电机、b轴rv减速机、ab轴机体和刀具本体,所述ab轴机体设有带高速电机的高速电机安装座,所述刀具本体与高速电机连接;所述a轴伺服电机驱动所述a轴rv减速机带动所述ab轴机体转动,所述b轴伺服电机驱动所述b轴rv减速机带动所述高速电机安装座转动,进而实现刀具本体的旋转动作。3.根据权利要求2所述的三位五轴数控加工中心,其特征在于所述z轴移动组件包括z轴伺服电机、z轴螺杆和z轴导轨,所述z轴导轨设置在所述立柱上,所述z轴横梁滑动设置在所述z轴导轨上。4.根据权利要求1所述的三位五轴数控加工中心,其特征在于所述机座设有y轴导轨,所述y轴工作台滑动设置在所述y轴导轨上。
技术总结
本实用新型公开了一种三位五轴数控加工中心,包含:门桥、机座、Z轴横梁、配重链条和配重气缸,所述门桥包括设于机座上的两根立柱和连接两立柱的桥体,两所述立柱均设有Z轴移动组件,所述Z轴横梁连接于两所述Z轴移动组件的输出端上,所述配重气缸设置在所述门桥的外侧,所述配重链条的一端与所述配重气缸的输出端连接,所述配重链条的另一端与所述Z轴横梁连接;所述Z轴横梁设有X轴移动组件,所述X轴移动组件包括X轴导轨和AB轴安装梁,所述X轴导轨设置在所述Z轴横梁上,所述AB轴安装梁滑动设置在所述X轴导轨上,所述AB轴安装梁设有三套AB轴刀具组件。本实用新型相同时间内加工工件的数量是传统机型的3倍,加工效率高。加工效率高。加工效率高。
技术研发人员:张贯都 田朝云
受保护的技术使用者:东莞市宝盈机械有限公司
技术研发日:2021.03.26
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。