1.本实用新型涉及铁路轨道技术领域,尤其涉及一种用于全自动轨道螺栓作业机的拧紧装置。
背景技术:
2.螺栓是轨道上的关键配件,螺栓拧紧扭矩的大小对轨道连接可靠性有很大影响。目前铁路上的螺栓旋拧作业设备逐渐趋于半自动化或者自动化,全自动轨道螺栓作业机作为本行业的自动化设备可以实现整体设备的自动定位、作业头自动作业。为实现全自动轨道螺栓的旋拧锁紧程度标准并且一致。
3.作为本行业的技术人员,非常有必要设计一款采用扭矩法拧紧的专用设备,通过此种设备实现对现有的轨道螺栓进行锁紧作业。并且采用此种设备可以达到扭矩预设值。
技术实现要素:
4.本实用新型的目的是为了解决当前全自动轨道螺栓作业机在螺栓拧紧过程中无法准确实现预设扭矩的现象,进而提出的一种用于全自动轨道螺栓作业机的拧紧装置。
5.为了实现上述目的,本实用新型提出一种用于全自动轨道螺栓作业机的拧紧装置。包括直流电机、联轴器、扭矩传感器、减速机、轴承端座、花键轴、电动扳手、加油扳手头;
6.所述的直流电机的输出轴安装有联轴器,所述的联轴器内设置有退刀槽,联轴器上连接有扭矩传感器,所述扭矩传感器的输出轴与减速机相连,减速机内设置有安装孔,所述的减速机与轴承端座相连,所述的轴承端座与电动扳手相连,所述的电动扳手的输出轴固定连接有加油扳手头。
7.所述的减速机上设置有花键轴,通过花键轴实现减速机与电动扳手的驱动连接。
8.通过上述方案,全自动轨道螺栓作业机自动定位至作业螺栓后,直流电机低速启动,直流电机输出扭矩值通过减速机增大,最后带动加油扳手头转动,加油扳手头跟随压杆下压直至套紧螺栓,当扭矩传感器检测到螺栓拧紧至贴合扭矩时向外部的控制器传递电信号,控制器控制直流电机高速旋转,当控制器检测到螺栓扭矩达到预设扭矩时停止电机完成作业。
9.与现有拧紧装置相比,本实用新型的有益效果是:本实用新型所述的拧紧装置在拧紧过程中采用高精度的扭矩传感器,可以实时检测输出扭矩,增强了拧紧扭矩的准确性,通过设置直流电机的扭矩避免了电机失常所导致的作业螺栓损坏。
附图说明
10.为了能进一步详细说明拧紧的工作原理,下面对本实用新型专利的结构及组成进行详细介绍。
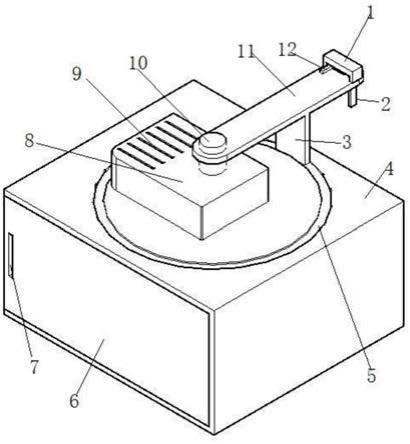
11.图1是本实用新型立体结构示意图;
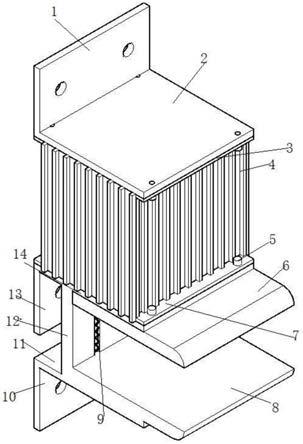
12.图2是本实用新型主视结构示意图;
13.图3是本实用新型仰视结构示意图。
14.1.直流电机、2.联轴器、3.扭矩传感器、4.减速机、5.轴承端座、6.花键轴、7.电动扳手、8.加油扳手头。
具体实施方式
15.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本实用新型,并不用于限定本实用新型。
16.请参阅附图对本实用新型工作原理进行详细说明。
17.参照图1、和图2所示,以上所述的全自动轨道螺栓作业机启动后,控制器输出控制信号控制直流电机1低速转动,直流电机1带动联轴器2转动,联轴器2与扭矩传感器3的输入轴连接,扭矩传感器3的输出轴与减速机4连接,减速机4的驱动端设计为花键轴6,花键轴6穿过轴承端座5后和电动扳手7连接实现驱动,所述的电动扳手7的下部为加油扳手头8。
18.本装置在使用时,其将本全自动轨道螺栓作业机移动到合适位置,加油扳手头8跟随压杆下压直至套紧扳手,此时直流电机1驱动减速机4带动电动扳手7动作,螺栓开始拧紧,当扭矩传感器3检测到螺栓紧固至贴合扭矩时向控制器传递电信号,控制器控制直流电机1持续加速,在螺栓扭矩达到预设值时,扭矩传感器3测知并向控制器传递电信号,直流电机1停止工作,压杆抬起带动加油扳手头8抬起,至此完成作业,等待到达下一个作业位置,重复上述工作步骤。
19.当然,以上所述仅为本实用新型的具体实施例,本文的说明只是用于帮助理解其核心思想和方法,并非是对技术特征的限定。对于本领域的一般技术人员而言,在上述说明的基础上还是可以做出很多形式的改进变动,这里无法予以穷举。凡是根据本实用新型技术实质对以上实施例所作的任何修改、等同替换和改进等,均应包含于本实用新型权利要求的保护范围内。
技术特征:
1.一种用于全自动轨道螺栓作业机的拧紧装置,其特征在于:包括直流电机(1)和联轴器(2)和扭矩传感器(3)和减速机(4)和轴承端座(5)和花键轴(6)和电动扳手(7)和加油扳手头(8),所述直流电机(1)输出轴安装有联轴器(2),所述联轴器(2)连接有扭矩传感器(3),所述扭矩传感器(3)输出轴与减速机(4)相连,所述减速机(4)与轴承端座(5)相连,所述轴承端座(5)与电动扳手(7)相连,所述电动扳手(7)输出轴固定连接有加油扳手头(8)。2.根据权利要求1所述的一种用于全自动轨道螺栓作业机的拧紧装置,其特征在于:所述联轴器(2)内有退刀槽。3.根据权利要求1所述的一种用于全自动轨道螺栓作业机的拧紧装置,其特征在于:电动扳手(7)内有花键轴(6)。4.根据权利要求1所述的一种用于全自动轨道螺栓作业机的拧紧装置,其特征在于:减速机(4)内有安装孔。
技术总结
本实用新型专利的目的是设计一种用于全自动轨道螺栓作业机的拧紧装置,所述直流电机通过联轴器与扭矩传感器相连,所述扭矩传感器输出端与减速机相连,所述减速机与轴承端座相连,所述轴承端座与电动扳手相连,所述电动扳手输出轴固定连接有加油扳手头。此拧紧装置的优势在于:通过高精度的扭矩传感器检测扭矩,并结合螺栓屈服极限法提高螺栓作业的可靠性和准确性。和准确性。和准确性。
技术研发人员:李勇 孟建军 王国杰 曹京年 刘洋
受保护的技术使用者:河北鑫能轨道交通设备科技有限公司
技术研发日:2021.03.01
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。