1.本实用新型涉及挖掘机的模拟机技术领域,尤其涉及一种易于移动的挖机模拟机。
背景技术:
2.为了更加给受训者展示较为真实的模拟机,仿真的挖掘机机体通常较大且重量较重,在运输以及搬运过程中极大的加大了工人的工作量,为解决以上问题提供一种易于移动的挖机模拟机。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,适应现实需要,提供一种易于移动的挖机模拟机。
4.为了实现本实用新型的目的,本实用新型所采用的技术方案为:
5.包括座椅、屏幕、主机、支撑箱、支撑架、脚踏板模块和手柄模块,所述支撑架呈“l”型,且其夹角大于90度,所述屏幕固定于支撑架的延伸端,所述主机固定于所述支撑箱内,所述支撑箱螺栓连接于所述支撑架的水平端,其座椅固定于所述支撑箱上,所述手柄模块焊接固定于支撑箱的左右两侧,脚踏板模块焊接固定于屏幕与支撑箱之间,具体来说,所述脚踏板模块与手柄模块通过蓝牙连接主机,通过蓝牙连接的脚踏板与手柄实现信号的实时输入与输出,从而使受训者得到训练。
6.所述移动机构包括支撑组件,所述支撑组件包括上支撑杆和下支撑杆,具体来说,所述上支撑杆和下支撑杆的长度大于上固定杆的高度,即二者位于支撑箱内并形成夹角且其夹角小于180度,所述上支撑杆和下支撑杆上下两端分别设有铰接孔,还包括上固定杆,所述上固定杆两端固定在支撑箱左右两侧,还包括滑槽,具体来说,所述滑槽截面呈“t”字形,所述滑槽未两条分别位于所述上固定杆的正下方并向下延伸,还包括下固定杆,所述下固定杆两端设有滑块,所述下固定杆通过两端的滑块滑动连接在所述滑槽内并可上下运动,所述上支撑杆一端通过上固定杆贯穿所述铰接孔将所述上支撑杆转动连接在上固定杆上,下固定杆贯穿所述下支撑杆一端上的铰接孔转动连接造固定杆上,上固定杆和下固定杆的活动端通过连接轴转动连接。
7.所述支撑组件还包括推拉组件,所述推拉组件包括螺纹杆,所述螺纹杆两端旋向相反,所述螺纹杆位于上支撑杆与下支撑杆连线垂线的左侧或右侧并延伸至所述支撑箱外侧,还包括滑块,所述滑块为两块,分别位于螺纹杆的两端,还包括推拉杆,所述推拉杆为两根,两根所述推拉杆一端铰接于滑块上,另一端铰接于连接轴上,通过移动机构中的螺纹杆正转,两滑块相互靠近且与滑块铰接的推拉杆向外推动连接轴,从而带动上支撑杆绕着上固定杆做弧线运动,而下支撑杆则通过滑槽导向做向上的直线向下运动,使得下支撑杆伸入或伸出支撑箱。
8.还包括万向轮和万向轮,具体来说,所述万向轮固定连接在所述下支撑杆下端部,
其滑轮位于支撑架的拐角处,还包括通孔,所述通孔位于万向轮的下方并贯穿所述支撑箱的下侧面与外界连通,由于下支撑杆下端部固定有万向轮,在下支撑杆向下运动时将万向轮伸出至支撑箱外,而后通过万向轮和滑轮支撑起模拟机,推动支撑架从而实现移动,反之即可收回万向轮,通过上述方式调节使得本设计调节与使用起来非常实用与灵活。
9.还包括防滑块,所述防滑块为橡胶体且位于支撑架水平端的尾部,通过设置的防滑块可增大模拟机与地面之间的摩擦,防止模拟机因滑动而产生的尖锐响声。
10.本实用新型的有益效果在于:
11.1.通过移动机构中的螺纹杆正转,两滑块相互靠近且与滑块铰接的推拉杆向外推动连接轴,从而带动上支撑杆和下支撑杆伸直使上支撑杆和下支撑杆的轴线与水平线垂直并将万向轮推出至通孔外,而后通过万向轮和滑轮支撑起模拟机,推动支撑架从而实现移动,反之即可收回万向轮,通过上述方式调节使得本设计调节与使用起来非常实用与灵活;
12.2.通过蓝牙连接的脚踏板与手柄实现信号的实时输入与输出,从而使受训者得到训练;
13.3.通过设置的防滑块可增大模拟机与地面之间的摩擦,防止模拟机因滑动而产生的尖锐响声。
附图说明
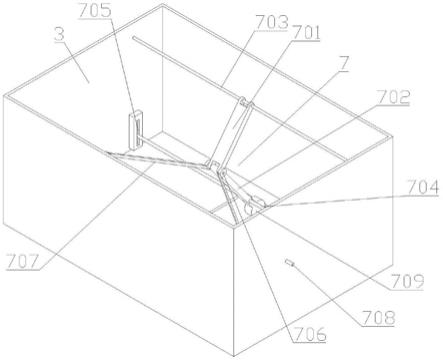
14.图1为本设计中的移动机构结构示意图;
15.图2为本设计中的移动机构俯视结构示意图;
16.图3为本设计的模拟机的主要结构示意图;
17.图4为本设计的模拟机侧视结构示意图;
18.1.支撑架;2.屏幕;3.支撑箱;4.手柄模块;5.脚踏板模块;6.座椅;7.移动机构;8.滑轮;9.防滑块;
19.701.上支撑杆;702.下支撑杆;703.上固定杆;704.下固定杆;705.滑槽;706.连接轴;707.推拉杆;708.螺纹杆;709.万向轮;710.滑块;711.通孔。
具体实施方式
20.下面结合附图和实施例对本设计进一步说明:
21.实施例1:一种易于移动的挖机模拟机,参见图1至图4。
22.包括座椅6、屏幕2、主机、支撑箱3、支撑架1、脚踏板模块5和手柄模块4,所述支撑架1呈“l”型,且其夹角大于90度,所述屏幕2固定于支撑架1的延伸端,所述主机固定于所述支撑箱3内,所述支撑箱3螺栓连接于所述支撑架1的水平端,其座椅6固定于所述支撑箱3上,所述手柄模块4焊接固定于支撑箱3的左右两侧,脚踏板模块5焊接固定于屏幕2与支撑箱3之间,具体来说,所述脚踏板模块5与手柄模块4通过蓝牙连接主机,通过蓝牙连接的脚踏板与手柄实现信号的实时输入与输出,从而使受训者得到训练。
23.所述移动机构7包括支撑组件,所述支撑组件包括上支撑杆701和下支撑杆702,具体来说,所述上支撑杆701和下支撑杆702的长度大于上固定杆703的高度,即二者位于支撑箱3内并形成夹角且其夹角小于180度,所述上支撑杆701和下支撑杆702上下两端分别设有铰接孔,还包括上固定杆703,所述上固定杆703两端固定在支撑箱3左右两侧,还包括滑槽
705,所述滑槽705未两条分别位于所述上固定杆703的正下方并向下延伸,还包括下固定杆704,所述下固定杆704两端设有滑块710,所述下固定杆704通过两端的滑块710滑动连接在所述滑槽705内并可上下运动,所述上支撑杆701一端通过上固定杆703贯穿所述铰接孔将所述上支撑杆701转动连接在上固定杆703上,下固定杆704贯穿所述下支撑杆702一端上的铰接孔转动连接造固定杆上,上固定杆703和下固定杆704的活动端通过连接轴706转动连接。
24.所述支撑组件还包括推拉组件,所述推拉组件包括螺纹杆708,所述螺纹杆708两端旋向相反,所述螺纹杆708位于上支撑杆701与下支撑杆702连线垂线的左侧或右侧并延伸至所述支撑箱3外侧,还包括滑块710,所述滑块710为两块,分别位于螺纹杆708的两端,还包括推拉杆707,所述推拉杆707为两根,两根所述推拉杆707一端铰接于滑块710上,另一端铰接于连接轴706上,通过移动机构7中的螺纹杆708正转,两滑块710相互靠近且与滑块710铰接的推拉杆707向外推动连接轴706,从而带动上支撑杆701绕着上固定杆703做弧线运动,而下支撑杆702则通过滑槽705导向做向上的直线向下运动,使得下支撑杆702伸入或伸出支撑箱3。
25.还包括万向轮709,具体来说,所述万向轮709固定连接在所述下支撑杆702下端部,其滑轮8位于支撑架1的拐角处,还包括通孔711,所述通孔711位于万向轮709的下方并贯穿所述支撑箱3的下侧面与外界连通,由于下支撑杆702下端部固定有万向轮709,在下支撑杆702向下运动时将万向轮709伸出至支撑箱3外,而后通过万向轮709和滑轮8支撑起模拟机,推动支撑架1从而实现移动,反之即可收回万向轮709,通过上述方式调节使得本设计调节与使用起来非常实用与灵活。
26.还包括防滑块9,所述防滑块9为橡胶体且位于支撑架1水平端的尾部,通过设置的防滑块9可增大模拟机与地面之间的摩擦,防止模拟机因滑动而产生的尖锐响声。
27.在具体实施过程中:受训者左在座椅6上并位于底板上方。
28.在使用时,受训者脚踩脚踏板,手握手柄,脚踏板以及手柄的动作通过蓝牙传输进电脑系统,进行模拟挖机工作。
29.在搬运本设计时,顺时针转动移动机构7中的螺纹杆708,此时位于螺纹杆708两端的滑块710相互靠近,而分别与两滑块710铰接的推拉杆707二者夹角减小,但由于二者同一端位于螺纹杆708上,另一端随着两滑块710的靠近向远离螺纹杆708的方向运动,从而推动连接轴706向远离螺纹杆708的方向运动,由于上支撑杆701和下支撑杆702端部与连接轴706铰接,在连接轴706远离螺纹杆708时,上支撑杆701做远离螺纹杆708的弧线运动,下支撑杆702由于铰接于下固定杆704上,下固定杆704两端分别滑动连接于滑槽705内,其上支撑杆701与下支撑杆702夹角增大,从而迫使下支撑杆702带动下固定杆704向下运动,由于下支撑杆702的下端部与万向轮709固定连接在下固定杆704向下运动时带动万向轮709由通孔711伸出至支撑箱3外,从而将支撑架1撑起,而由于支撑架1下方的拐角处也设有滑轮8,使得在万向轮709撑起支撑架1后,整个装置被滑轮8以及万向轮709顶起,从而方便移动。
30.移动至指定地点后,按上述相反方式即可将万向轮709收回,其次由于支撑架1尾部的防滑块9可以防止模型机滑动,以及减少了金属与地面摩擦产生的尖锐异响。
31.本实用新型的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本实用新型的精神,并做出不同的引申和变化,但只要
不脱离本实用新型的精神,都在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。