技术特征:
1.一种方法,包括:获得光检测和测距(lidar)设备的视场(fov)的多个扫描,其中,所述lidar设备被安置在外壳内部,且其中,获得所述多个扫描中的每一扫描包括:通过所述外壳的多个区部发送从所述lidar设备在不同方向上朝向所述外壳发射的多个光脉冲,以及检测多个返回光脉冲,所述多个返回光脉冲包括被反射回到所述lidar设备的所发送的多个光脉冲的反射部分;基于所述多个扫描,检测至少部分阻碍所述lidar设备通过所述外壳扫描所述fov的障碍物;确定所述障碍物不会阻碍所述lidar设备通过所述外壳的一个或多个区部扫描所述fov;以及标识所述外壳的介于所述lidar设备与所述障碍物之间的特定区部。2.根据权利要求1所述的方法,还包括基于所述多个扫描来确定所述障碍物是否被耦合到所述lidar设备。3.根据权利要求1所述的方法,还包括:基于所述外壳的所述特定区部的所述标识来操作清洁装置。4.根据权利要求3所述的方法,还包括:基于所述多个扫描来确定所述障碍物的类型,其中,操作所述清洁装置进一步是基于对所述障碍物的所述类型的确定的。5.根据权利要求1所述的方法,还包括:确定由所述lidar设备从所述外壳的所述特定区部接收到的第一返回光脉冲的第一光强度;以及确定由所述lidar设备从所述外壳的所述一个或多个区部接收到的其他返回光脉冲的第二光强度,其中,标识所述外壳的所述特定区部是基于所述第一光强度和所述第二光强度。6.根据权利要求1所述的方法,还包括:标识由所述lidar设备在所述多个扫描中的第一扫描期间通过所述外壳的第一区部和在所述多个扫描中的第二扫描期间通过所述外壳的第二区部扫描的目标;以及将所述第一扫描的与所标识出的目标相关联的第一部分与所述第二扫描的与所标识出的目标相关联的第二部分进行比较,其中,检测所述障碍物是基于所述比较的。7.根据权利要求1所述的方法,还包括:标识由所述lidar设备在所述多个扫描中的第一扫描期间通过所述外壳的第一区部和在所述多个扫描中的第二扫描期间通过所述外壳的第二区部扫描的环境的区域;以及将所述第一扫描的与所标识出的区域相关联的第一部分与所述第二扫描的与所标识出的区域相关联的第二部分进行比较,其中,检测所述障碍物是基于所述比较的。8.根据权利要求1所述的方法,其中,所述lidar设备被安装到系统,其中,第二lidar设备被安装到所述系统,所述方法还包括:标识在所述多个扫描中的第一扫描期间由所述lidar设备扫描且在所述第二lidar设备对所述环境的第二扫描期间由所述第二lidar设备扫描的目标;以及
将所述第一扫描的与所标识出的目标相关联的第一部分与所述第二扫描的与所标识出的目标相关联的第二部分进行比较,其中,检测所述障碍物进一步是基于所述比较的。9.根据权利要求1所述的方法,其中,所述lidar设备被安装到系统,其中,第二lidar设备被安装到所述系统,所述方法还包括:标识在所述多个扫描中的第一扫描期间由所述lidar设备扫描且在所述第二lidar设备对环境的第二扫描期间由所述第二lidar设备扫描的所述环境的区域;以及将所述第一扫描的与所标识出的区域相关联的第一部分与所述第二扫描的与所标识出的区域相关联的第二部分进行比较,其中,检测所述障碍物进一步是基于所述比较的。10.根据权利要求1所述的方法,其中,获得所述多个扫描包括:在连续扫描时间段期间获得所述fov的完整扫描序列;以及从所述完整扫描序列选择所述多个扫描。11.根据权利要求10所述的方法,还包括:在所述完整扫描序列的第一扫描期间确定所述lidar设备在所述lidar的环境中的第一位置和在所述完整扫描序列的第二扫描期间确定所述lidar设备的第二位置,其中,选择所述多个扫描包括基于所述第一位置和所述第二位置的比较来选择所述第一扫描和所述第二扫描。12.根据权利要求10所述的方法,其中,所述lidar设备被安装到系统,所述系统被配置为在所述系统的环境中移动,所述方法还包括:确定在所述完整扫描序列的第一扫描期间所述系统相对于所述环境的第一定向和在所述完整扫描序列的第二扫描期间所述系统的第二定向,其中,选择所述多个扫描包括基于所述第一定向和所述第二定向的比较来选择所述第一扫描和所述第二扫描。13.根据权利要求1所述的方法,还包括:基于至少所述多个返回光脉冲的第一子集从距所述lidar设备小于阈值距离的位置被反射回到所述lidar设备来选择所述第一子集作为每一扫描的反馈返回,其中,检测所述障碍物是基于至少由所述lidar设备针对所述反馈返回指示的光强度测量。14.根据权利要求1所述的方法,其中,发送所述多个光脉冲包括从所述lidar设备在不同方向上朝向所述外壳发射所述多个光脉冲,且其中,从所述lidar设备在不同方向上朝向所述外壳发射所述多个光脉冲包括在所述lidar设备发射所述多个光脉冲的同时使所述lidar设备绕轴旋转。15.根据权利要求14所述的方法,其中,使所述lidar设备绕所述轴旋转使所述lidar设备的一个或多个光发射器相对于所述外壳移动,且其中,所述发送的多个光脉冲是由所述一个或多个光发射器发射的。16.根据权利要求1所述的方法,其中,从所述lidar设备在不同方向上朝向所述外壳发射所述多个光脉冲包括:使所述lidar设备中的光发射器朝向所述lidar设备中的包括一个或多个光学元件的光束转向装置发射一系列光脉冲;以及经由所述一个或多个光学元件,将所述系列光脉冲中的每一光脉冲在不同的相应方向
上转向所述外壳。17.根据权利要求1所述的方法,其中,发送所述多个光脉冲包括:使所述lidar设备的第一光发射器发射第一发散光束,且使所述lidar设备的第二光发射器发射第二发散光束;以及通过所述外壳的第一区部发送所述第一发散光束且通过所述外壳的第二区部发送所述第二发散光束。18.一种光检测和测距(lidar)设备,包括:外壳;控制器,被配置为使所述lidar设备执行包括以下各项的操作:获得所述lidar设备的视场(fov)的多个扫描;针对所述多个扫描中的每一扫描:通过所述外壳发送从所述lidar设备在不同方向上朝向所述外壳发射的多个光脉冲,以及检测包括所发送的多个光脉冲的反射部分的多个返回光脉冲;基于所述多个扫描,检测至少部分阻碍所述lidar设备通过所述外壳扫描所述fov的障碍物;确定所述障碍物不会阻碍所述lidar设备通过所述外壳的一个或多个区部扫描所述fov;以及标识所述外壳的介于所述lidar设备与所述障碍物之间的特定区部。19.根据权利要求18所述的lidar设备,其中所述外壳包括圆顶形滤光器。20.一种系统,包括:外壳;光检测和测距(lidar)设备,被安置在所述外壳内部,其中,所述lidar设备被配置为通过所述外壳扫描视场(fov),其中,所述lidar设备被配置为针对所述fov的每一扫描,发送从所述lidar设备在不同方向上朝向所述外壳发射的多个光脉冲,以及其中,所述lidar设备被配置为针对所述fov的每一扫描接收多个返回光脉冲,所述多个返回光脉冲包括被反射回到所述lidar设备的所述发射的多个光脉冲的反射部分;一个或多个处理器;以及数据存储装置,存储指令,当由所述一个或多个处理器执行时,所述指令使所述系统执行包括以下各项的操作:从所述lidar设备接收指示所述fov的多个扫描的数据;基于所接收到的数据,检测至少部分阻碍所述lidar设备通过所述外壳扫描所述fov的障碍物;确定所述障碍物不会阻碍所述lidar设备通过所述外壳的一个或多个区部扫描所述fov;以及标识所述外壳的介于所述lidar设备与所述障碍物之间的特定区部。
技术总结
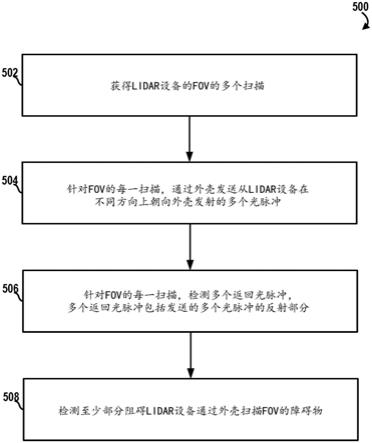
一种示例方法涉及获得被安置在外壳内部的光检测和测距(LIDAR)设备的视场(FOV)的多个扫描。获得多个扫描中的每一扫描包括:通过外壳的多个区部传输从LIDAR设备在不同方向上朝向外壳发射的多个光脉冲;以及检测多个返回光脉冲,多个返回光脉冲包括被反射回到LIDAR设备的传输的多个光脉冲的反射部分。方法还涉及基于多个扫描来检测至少部分阻碍LIDAR设备通过外壳扫描FOV的障碍物。通过外壳扫描FOV的障碍物。通过外壳扫描FOV的障碍物。
技术研发人员:G.肖坦 L.沃赫特 C.布雷利 C.劳特巴赫 X.胡 M.邹
受保护的技术使用者:伟摩有限责任公司
技术研发日:2020.03.13
技术公布日:2021/10/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。