1.本发明涉及机器人自动化领域,尤其涉及一种可实现大型工件自动化对接并联机构装置及引导方法。
技术背景
2.随着机器人技术的快速发展,工业机器人在各个行业得到了广泛的应用。根据工业机器人的结构进行分类,主要分为串联、并联和混联三种主要类型。其中并联机器人相对串联机器人具有高刚度、高负载等优势,逐渐被广泛应用在高端制造业等领域。随着航空航天等行业的持续快速发展,原有的手动生产方式已经不再满足当前的生产效率要求,在航空航天行业内,大型构件的自动化对接是目前亟待解决的关键问题之一。
3.目前,大型构件的自动化对接主要是依赖于人工手动引导,此种方式存在对接效率低、对接精度及质量的一致性差等问题。通过机器人构建柔性装配系统是当前解决该方法的主要途径。而当前柔性装配系统主要是采用串联型工业机器人,该类型机器人精度无法满足高精度装配的需求,尤其对于“丝”级精度要求,其次,串联型工业机器人的末端无法仅有500kg左右,对于一些大型构件的装配无法满足要求。而并联机器人能够满足大负载和高精度的要求,但由于当前工业机器人的控制系统是半闭环控制结构,无法保证系统在对接过程中的精度。目前存在基于视觉引导的柔性装配系统,但视觉测量系统的测量精度无法满足高精度要求。而且若要视觉测量系统实现高精度测量,往往会安装在大型构件上,这将对对接过程造成影响。除此以外,目前的机器人对接平台主要是采用一台机器人设备承载大型构件,另外一个大型构件采用固定不动的形式。由于仅有一台机器人实现对接运动,因此,这种对接方式的工作效率相对较低。综上所述,目前亟待发明设计一种高效率的大型构建自动化对接装置系统以及高精度的对接引导方法。
技术实现要素:
4.本发明所要解决的技术问题在于,克服现有技术在航空舱段手动对接技术效率低、对接精度及质量一致性差等问题,提供一种可实现大型构件自动化对接并联机构装置,该装置满足大负载、高精度对接精度要求,同时结合激光跟踪仪这一高精度测量设备,实现双并联机构装置的引导控制。
5.本发明的大型构件自动化对接并联机构装置,所述装置包含左侧六自由度并联机器人、右侧六自由度并联机器人、激光跟踪仪、多个坐标系定位板,其中,所述激光跟踪仪安装于两个并联机器人中间,每个六自由度并联机器人上均安装有坐标系定位板;
6.两个六自由度并联机器人上方通过环形夹装台夹持大型构件,两个大型构件为待对接构件;
7.每个坐标系定位板均位于激光跟踪仪的视场内。
8.进一步的,所述装置包含第一坐标系定位板、第二坐标系定位板、第三坐标系定位板和第四坐标系定位板,每个六自由度并联机器人上均安装有两个坐标系定位板;还包含
左侧环形夹装台,右侧环形夹装台;左侧六自由度并联机器人上放置带定位孔的第一大型构件,右侧六自由度并联机器人上放置带定位销的第二大型构件。
9.进一步的,所述左侧六自由度并联机器人和右侧六自由度并联机器人的下平面分别固定第一坐标系定位板、第二坐标系定位板,用于实现六自由度并联机器人基坐标系的测量;所述左侧六自由度并联机器人和右侧六自由度并联机器人上分别安装左侧环形夹装台和右侧环形夹装台,左侧环形夹装台和右侧环形夹装台分别安装第三坐标系定位板和第四坐标系定位板,用于实现大型构件的位姿测量。
10.进一步的,每个坐标系定位板结构相同,包含一个定位转接板、三个磁性靶球基座以及每个靶球基座上均设有一个靶球;其中定位转接板固定安装在各个待检测的位置,三个磁性靶球基座以120度角度间隔分布在定位转接板上,各靶球的朝向可以调整,各靶球按序标号。
11.本技术还提供上述大型构件的自动化对接引导方法,所述引导方法包括:
12.s1,确定各定位板的坐标系在激光跟踪仪视场中的位置;
13.s2,对接大型构件,首先,确定两个六自由度并联机器人之间的转换关系,然后根据各定位板的坐标系在激光跟踪仪视场中的位置,采用靶球定位的方式确定两个对接面坐标系之间的转换关系;
14.s3,在对接过程不断修正左侧六自由度并联机器人与右侧六自由度并联机器人的运动轨迹。
15.进一步的,所述s1为:
16.s11,按照顺序测量第一、第二、第三靶球在激光跟踪仪测量坐标系{l}o
l-xyz下的空间位置,分别记为p1,p2,p3;
17.s12,以p1点作为第一坐标系定位板的坐标系的原点,以p1,p2点的连线方向的单位向量n为x轴方向,以p1,p2,p3构成的平面法向量的单位向量a为z轴方向;
18.s13,根据以上信息得到第一坐标系定位板的坐标系{f1}在激光跟踪仪测量坐标系{l}o
l-xyz下的位姿矩阵h如下所示:
[0019][0020]
s14,重复步骤s11至s13,以得到第二、第三、第四坐标系定位板的坐标系在激光跟踪仪测量坐标系{l}ol-xyz下的位姿矩阵{f2}、{f3}、{f4}。
[0021]
进一步的,所述s2为:
[0022]
s21,将激光跟踪仪、左侧六自由度并联机器人、右侧六自由度并联机器人、带定位孔的第一大型构件和带定位销的第二大型构件、第一环形夹装台、第二环形夹装台按照权利要求1所述位置关系安装好;
[0023]
s22,将第一至第四坐标系定位板分别固定安装在左侧六自由度并联机器人和右侧六自由度并联机器人的下平台和两个环形夹装台上,保证靶球在激光跟踪仪可跟踪定位范围内;
[0024]
s23,以激光跟踪仪的测量坐标系{l}o
l
–
xyz作为参考,定义左侧六自由度并联机器人的基坐标系为{m}om–
xyz,右侧六自由度并联机器人的基坐标系为{n}om–
xyz,利用第一
坐标系定位板、第二坐标系定位板测量得到的两个坐标系分别为{f1}和{f2},坐标系{m}om–
xyz与{f1}、坐标系{n}om–
xyz与{f2}之间的转换关系已知,当测量得到{f1}和{f2}的位姿后,得到左侧六自由度并联机器人与右侧六自由度并联机器人之间的基坐标系转换关系;
[0025]
s24,以激光跟踪仪的测量坐标系{l}o
l
–
xyz作为参考,定义左侧六自由度并联机器人上的环形夹装台的坐标系为{d}o
d-xyz,右侧六自由度并联机器人的环形夹装台的坐标系为{e}oe–
xyz;利用第三坐标系定位板、第三坐标系定位板测量得到的两个坐标系分别为{f3}和{f4};
[0026]
s25,带定位孔的第一大型构件的对接面坐标系{d1}o
d1
–
xyz,带定位销的第二大型构件的对接面坐标系{e1}o
e1
–
xyz在参考坐标系下的坐标方向均与参考坐标系一致,通过靶球放置在对接面上的固定位置,确定带定位孔的第一大型构件的对接面坐标系{d1}o
d1
–
xyz和{d}od–
xyz,带定位销的第二大型构件的对接面坐标系{e1}o
e1
–
xyz和{e}oe–
xyz之间的转换关系;
[0027]
s26,而坐标系{d}od–
xyz与{f3}、坐标系{e}oe–
xyz与{f4}之间的转换关系已知,根据所述{f3}和{f4}的位姿,得到带定位孔的第一大型构件和带定位销的第二大型构件之间的转换关系;
[0028]
s27,通过步骤s21至步骤s26得到带定位孔的第一大型构件的对接面坐标系{d1}o
d1
–
xyz与左侧六自由度并联机器人的基坐标系{m}om–
xyz之间的转换关系,带定位销的第二大型构件的对接面坐标系{e1}o
e1
–
xyz与右侧六自由度并联机器人的基坐标系{n}om–
xyz之间的转换关系。
[0029]
进一步的,所述s3为:
[0030]
s31,将左侧六自由度并联机器人和右侧六自由度并联机器人的末端位姿以及带定位孔的第一大型构件和带定位销的第二大型构件的对接面位姿均表达在坐标系{l}o
l
–
xyz中;
[0031]
s32,选择两个对接面的坐标系原点连线的中点作为最终对接位置,姿态矩阵均为单位矩阵,左侧六自由度并联机器人和右侧六自由度并联机器人同时运动,将对接过程进行分段测量;
[0032]
s33,根据以上数据分别控制左侧六自由度并联机器人和右侧六自由度并联机器人进行运动,改变带定位孔的第一大型构件和带定位销的第二大型构件的相对位姿;
[0033]
s34,左侧六自由度并联机器人和右侧六自由度并联机器人完成每一阶段运动后,重新测量{f3}和{f4}坐标系的相对位姿,并将相对位姿转换为带定位孔的第一大型构件的对接面坐标系{d1}o
d1
–
xyz,带定位销的第二大型构件的对接面坐标系{e1}o
e1
–
xyz的相对位姿。
[0034]
本发明具有以下有益效果:一、利用两个六自由度并联机器人进行自动化对接,从而提升对接系统的对接效率;二、分段式对接过程,既实现过程误差校正,又降低六自由度并联机器人的长距离运行精度。
附图说明
[0035]
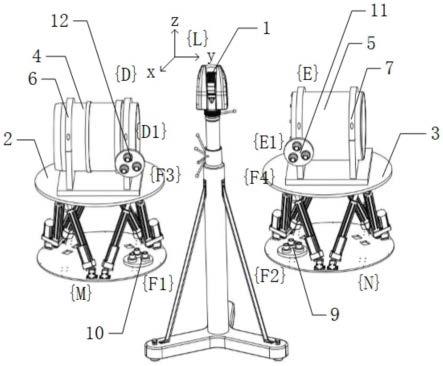
图1是本发明的对接装置系统结构示意图;
[0036]
图2是本发明的六自由度并联机器人结构示意图;
[0037]
图3是本发明的坐标系定位板结构示意图;
[0038]
图4是本发明的坐标系定位板坐标系定义示意图;
[0039]
图5是本发明的环形夹装台结构示意图;
[0040]
图6是本发明的待对接大型构件对接面坐标系示意图。
具体实施方式
[0041]
下面结合附图和实施例,对本发明作进一步详细说明。
[0042]
实施例1
[0043]
参见图1所示,本发明的可实现大型构件自动化对接并联机构装置及系统主要包含左侧六自由度并联机器人2、右侧六自由度并联机器人3、一台激光跟踪仪1、多个坐标系定位板,本实施例中,定位板为第一定位板9、第二定位板10、第三定位板11、第四定位板12,以及左侧环形夹装台6,右侧环形夹装台7。左侧六自由度并联机器人2上放置带定位孔的第一大型构件4,右侧六自由度并联机器人3上放置带定位销的第二大型构件5。
[0044]
激光跟踪仪1放在左侧六自由度并联机器人2、右侧六自由度并联机器人3的侧边,左侧六自由度并联机器人2、右侧六自由度并联机器人3分别放置在激光跟踪仪1的左侧和右侧。左侧六自由度并联机器人2和右侧六自由度并联机器人3的下平面分别固定一个坐标系定位板,分别为第二坐标系定位板10、第一坐标系定位板9,主要是用于实现六自由度并联机器人基坐标系的测量:
[0045]
标定板上有三个靶球,激光跟踪仪测量三个靶球的位置,通过三点可以确定平面,同时根据靶球顺序确定原点和坐标系,可以计算得到坐标系定位板的坐标系。坐标系定位板的安装位置与机器人的基坐标系转换关系可以根据设计图纸得到,因此,可以实现六自由度并联机器人基坐标系的测量,即基坐标系的位姿矩阵。
[0046]
左侧环形夹装台6的侧面固定安装第四坐标系定位板12,主要是用于实现带定位孔的第一大型构件4的位姿测量,从而保证自动化对接过程的轨迹引导和对接精度。带定位孔的第一大型构件4以通过左侧环形夹装台6固定在左侧六自由度并联机器人2上。由于带定位孔的第一大型构件4和带定位销的第二大型构件5与左侧环形夹装台6、右侧环形夹装台7之间是刚性连接,因此,只要确定两者之间的位姿转换关系,即可通过两个环形夹装台上的坐标系定位板12、11测量大型构件的位姿。根据大型构件的相对位姿误差,控制左侧六自由度并联机器人2和右侧六自由度并联机器人3的运动。
[0047]
在对接过程中,由于激光跟踪仪1无法实时跟踪各个坐标系的变化状态,因此通过编写激光跟踪仪1的控制程序,从而实现对接过程的分段引导。并且在该系统中,由于时同时引导左侧六自由度并联机器人2和右侧六自由度并联机器人3运动时,将会有效提升大型构件的对接效率。
[0048]
参见图2所示,左侧六自由度并联机器人2、右侧六自由度并联机器人3的结构相同,以左侧六自由度并联机器人2为例,主要是包含上平台201、下平台202以及六个支杆,分别为第一支杆203、第二支杆204、第三支杆205、第四支杆206、第五支杆207、第六支杆208。
[0049]
参见图3所示,以第一坐标系标定板9为例,第一坐标系定位板9主要包含一个定位转接板301、三个磁性靶球基座:第一磁性靶球基座305、第二磁性靶球基座306、第三磁性靶
球基座307、三个靶球:第一靶球302、第二靶球303、第三靶球304。其中定位转接板301可以通过螺丝固定安装在各个待检测的位置。三个磁性靶球基座以120度角度间隔分布在定位转接板301上,三个靶球分别通过磁吸附方式固定在三个磁性靶球基座中,本实施例中,各靶球的朝向可以自由调整,从而保证无论如何放置坐标系定位板均能够保证其能够被激光跟踪仪1测量,并且第一靶球302、第二靶球303、第三靶球304以红绿蓝颜色进行区分其测量的序号。
[0050]
如图5所示,为本发明的环形夹装台结构示意图,环形夹装台包含两个环形夹装抱箍以及安装台面703,每个环形夹装抱箍包含两个半抱箍,分别为图中的第一半抱箍701、第二半抱箍702、第三半抱箍704、第四半抱箍705,其中两个半抱箍安装于安装台面上,在其中一个环形夹装抱箍上安装一个坐标系定位板;如图6所示,是待对接大型构件对接面坐标系示意图;在所述第一大型构件4的侧壁上设有至少3个定位孔,分别为第一至第三定位孔401、402、403,基于上述结构实现大型构件的对接。
[0051]
实施例2
[0052]
参见图4所示,在对接过程中利用坐标系定位板9的位姿测量方法如下:
[0053]
(1)按照固定顺序测量第一、第二、第三靶球的坐标,譬如红绿蓝,利用激光跟踪仪1分别测量三个靶球在激光跟踪仪1测量坐标系{l}o
l-xyz下的空间位置,分别记为p1,p2,p3;
[0054]
(2)以p1点作为坐标系定位板9的坐标系的原点,以p1,p2点的连线方向的单位向量n为x轴方向。以p1,p2,p3构成的平面法向量的单位向量a为z轴方向,y轴的单位方向向量o由x轴和y轴的向量叉乘计算得到。
[0055]
(3)根据以上信息可以得到第一坐标系定位板9的坐标系{f}在激光跟踪仪1测量坐标系{l}o
l-xyz下的位姿矩阵h如下所示:
[0056][0057]
参见图1所示,在对接过程中坐标系相互转换方法如下:
[0058]
(1)将激光跟踪仪1放在左侧六自由度并联机器人2和右侧六自由度并联机器人3侧面,带定位孔的第一大型构件4和带定位销的第二大型构件5通过第一环形夹装台6、第二环形夹装台7固定在左侧六自由度并联机器人2和右侧六自由度并联机器人3的上平台。
[0059]
(2)将第一至第四坐标系定位板分别固定安装在左侧六自由度并联机器人2和右侧六自由度并联机器人3的下平台和两个环形夹装台上,保证靶球在激光跟踪仪1可跟踪定位范围内;
[0060]
(3)以激光跟踪仪1的测量坐标系{l}o
l
–
xyz作为参考,定义左侧六自由度并联机器人2的基坐标系为{m}om–
xyz,右侧六自由度并联机器人3的基坐标系为{n}om–
xyz,而利用第二坐标系定位板10、第一坐标系定位板9测量得到的两个坐标系分别为{f1}和{f2},f1和f2是指笛卡尔坐标系,该坐标系由三个靶球的位置定义。坐标系的位姿表达是通过位姿矩阵h表达。坐标系{m}om–
xyz与{f1}、坐标系{n}om–
xyz与{f2}之间的转换关系已知,因此当测量得到{f1}和{f2}的位姿后,可以得到左侧六自由度并联机器人2与右侧六自由度并联机器人3之间的基坐标系转换关系,标定板上有三个靶球,激光跟踪仪测量三个靶球的位置,
通过三点可以确定平面,同时根据靶球顺序确定原点和坐标系,可以计算得到坐标系定位板的坐标系。坐标系定位板的安装位置与机器人的基坐标系转换关系可以根据设计图纸得到,那么测量{f1}和{f2}的位姿后,可以通过以上转换关系计算得到机器人的基坐标系位姿,由于两个机器人的基坐标系位姿矩阵均是表达在激光跟踪仪的测量坐标系中,因此,可以实现六自由度并联机器人基坐标系转换;
[0061]
(4)以激光跟踪仪1的测量坐标系{l}o
l
–
xyz作为参考,定义左侧六自由度并联机器人2上的环形夹装台6的坐标系为{d}o
d-xyz,右侧六自由度并联机器人3的环形夹装台7的坐标系为{e}o
e-xyz,而利用第四坐标系定位板12、第三坐标系定位板11测量得到的两个坐标系分别为{f3}和{f4}。由于带定位孔的第一大型构件4和带定位销的第二大型构件5是人工夹装,无法实现精确的定位。因此,需要确定带定位孔的第一大型构件4的对接面坐标系{d1}o
d1
–
xyz和{d}od–
xyz,带定位销的第二大型构件5的对接面坐标系{e1}o
e1
–
xyz和{e}oe–
xyz之间的转换关系。带定位孔的第一大型构件4的对接面坐标系{d1}o
d1
–
xyz,带定位销的第二大型构件5的对接面坐标系{e1}o
e1
–
xyz在参考坐标系下的坐标方向均与参考坐标系一致。通过靶球放置在对接面上的固定位置,可以计算得到以上转换关系。而坐标系{d}od–
xyz与{f3}、坐标系{e}oe–
xyz与{f4}之间的转换关系已知。根据坐标系定位板的位姿测量方法可以计算得到{f3}和{f4}的位姿,可以得到带定位孔的第一大型构件4和带定位销的第二大型构件5之间的转换关系;
[0062]
(5)通过以上步骤也可以得到带定位孔的第一大型构件4的对接面坐标系{d1}o
d1
–
xyz,带定位销的第二大型构件5的对接面坐标系{e1}o
e1
–
xyz分别与左侧六自由度并联机器人2的基坐标系为{m}om–
xyz,右侧六自由度并联机器人3的基坐标系为{n}om–
xyz之间的转换关系。
[0063]
通过以上步骤确定了对接系统里各个坐标系之间的相对位姿关系。
[0064]
并且以上计算都以激光跟踪仪1的测量坐标系{l}o
l
–
xyz作为参考坐标系,将左侧六自由度并联机器人2和右侧六自由度并联机器人3的末端位姿以及带定位孔的大型构件4和带定位销的大型构件5的对接面位姿均表达在坐标系{l}o
l
–
xyz中。通过以上的坐标系转换可以将所有定义的坐标系转换到统一的坐标系中进行表达,这样两个六自由度并联机器人位置控制都可以表达在统一坐标系中,同时定义了六自由度并联机器人的目标位姿,机器人的控制是给定目标位姿后,输入控制器,即可实现运动控制。
[0065]
若左侧六自由度并联机器人2与右侧六自由度并联机器人3的运动轨迹精度不高时,需要在对接过程不断修正左侧六自由度并联机器人2与右侧六自由度并联机器人3的运动轨迹。对接过程的校正方法如下:
[0066]
(1)选择两个对接面的坐标系原点连线的中点作为最终对接位置,姿态矩阵均为单位矩阵,左侧六自由度并联机器人2和右侧六自由度并联机器人3同时运动,提高对接过程的效率,同时为了避免对接误差,将对接过程进行分段测量;
[0067]
(2)根据坐标系相互转换方法中的步骤(5)可以获得初始的带定位孔的大型构件4的对接面坐标系{d1}o
d1
–
xyz,带定位销的大型构件5的对接面坐标系{e1}o
e1
–
xyz在参考坐标系下的位姿;
[0068]
(3)根据以上数据分别控制左侧六自由度并联机器人2和右侧六自由度并联机器人3进行运动,改变带定位孔的大型构件4和带定位销的大型构件5的相对位姿;
[0069]
(4)左侧六自由度并联机器人2和右侧六自由度并联机器人3完成每一阶段运动后,重新测量{f3}和{f4}坐标系的相对位姿误差,并将该误差转换为带定位孔的大型构件4的对接面坐标系{d1}o
d1
–
xyz,带定位销的大型构件5的对接面坐标系{e1}o
e1
–
xyz的相对位姿。
[0070]
(5)最后保证带定位孔的大型构件4和带定位销的大型构件5的成功对接。
[0071]
本发明具有以下有益效果:一、利用两个六自由度并联机器人进行自动化对接,从而提升对接系统的对接效率;二、分段式对接过程,既实现过程误差校正,又降低六自由度并联机器人的长距离运行精度。
[0072]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,对于本技术领域的技术人员在本发明揭露的技术范围内,还可以做出若干改动和调整。因此,本发明的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。