技术特征:
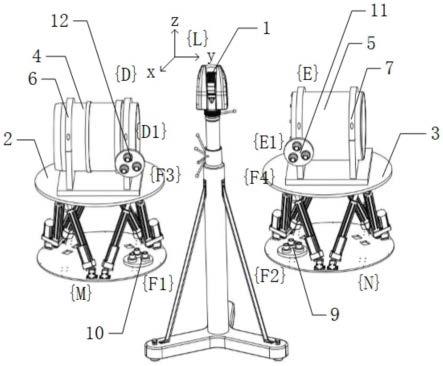
1.大型构件自动化对接并联机构装置,其特征在于,所述装置包含左侧六自由度并联机器人、右侧六自由度并联机器人、激光跟踪仪、多个坐标系定位板,其中,所述激光跟踪仪安装于两个并联机器人中间,每个六自由度并联机器人上均安装有坐标系定位板;两个六自由度并联机器人上方通过环形夹装台夹持大型构件,两个大型构件为待对接构件;每个坐标系定位板均位于激光跟踪仪的视场内。2.根据权利要求1所述的大型构件自动化对接并联机构装置,其特征在于,所述装置包含第一坐标系定位板、第二坐标系定位板、第三坐标系定位板和第四坐标系定位板,每个六自由度并联机器人上均安装有两个坐标系定位板;还包含左侧环形夹装台,右侧环形夹装台;左侧六自由度并联机器人上放置带定位孔的第一大型构件,右侧六自由度并联机器人上放置带定位销的第二大型构件。3.根据权利要求2所述的大型构件自动化对接并联机构装置,其特征在于,所述左侧六自由度并联机器人和右侧六自由度并联机器人的下平面分别固定第一坐标系定位板、第二坐标系定位板,用于实现六自由度并联机器人基坐标系的测量;所述左侧六自由度并联机器人和右侧六自由度并联机器人上分别安装左侧环形夹装台和右侧环形夹装台,左侧环形夹装台和右侧环形夹装台分别安装第三坐标系定位板和第四坐标系定位板,用于实现大型构件的位姿测量。4.根据权利要求2或3所述的大型构件自动化对接并联机构装置,其特征在于,每个坐标系定位板结构相同,包含一个定位转接板、三个磁性靶球基座以及每个靶球基座上均设有一个靶球;其中定位转接板固定安装在各个待检测的位置,三个磁性靶球基座以120度角度间隔分布在定位转接板上,各靶球的朝向可以调整,各靶球按序标号。5.大型构件自动化对接引导方法,其特征在于,所述引导方法包括:s1,确定各定位板的坐标系在激光跟踪仪视场中的位置;s2,对接大型构件,首先,确定两个六自由度并联机器人之间的转换关系,然后根据各定位板的坐标系在激光跟踪仪视场中的位置,采用靶球定位的方式确定两个对接面坐标系之间的转换关系;s3,在对接过程不断修正左侧六自由度并联机器人与右侧六自由度并联机器人的运动轨迹。6.根据权利要求5所述的大型构件自动化对接引导方法,其特征在于,所述s1为:s11,按照顺序测量第一、第二、第三靶球在激光跟踪仪测量坐标系{l}o
l-xyz下的空间位置,分别记为p1,p2,p3;s12,以p1点作为第一坐标系定位板的坐标系的原点,以p1,p2点的连线方向的单位向量n为x轴方向,以p1,p2,p3构成的平面法向量的单位向量a为z轴方向;s13,根据以上信息得到第一坐标系定位板的坐标系{f1}在激光跟踪仪测量坐标系{l}o
l-xyz下的位姿矩阵h如下所示:s14,重复步骤s11至s13,以得到第二、第三、第四坐标系定位板的坐标系在激光跟踪仪
测量坐标系{l}ol-xyz下的位姿矩阵{f2}、{f3}、{f4}。7.根据权利要求5所述的大型构件自动化对接引导方法,其特征在于,所述s2为:s21,将激光跟踪仪、左侧六自由度并联机器人、右侧六自由度并联机器人、带定位孔的第一大型构件和带定位销的第二大型构件、第一环形夹装台、第二环形夹装台按照权利要求1所述位置关系安装好;s22,将第一至第四坐标系定位板分别固定安装在左侧六自由度并联机器人和右侧六自由度并联机器人的下平台和两个环形夹装台上,保证靶球在激光跟踪仪可跟踪定位范围内;s23,以激光跟踪仪的测量坐标系{l}o
l
–
xyz作为参考,定义左侧六自由度并联机器人的基坐标系为{m}o
m
–
xyz,右侧六自由度并联机器人的基坐标系为{n}o
m
–
xyz,利用第一坐标系定位板、第二坐标系定位板测量得到的两个坐标系分别为{f1}和{f2},坐标系{m}o
m
–
xyz与{f1}、坐标系{n}o
m
–
xyz与{f2}之间的转换关系已知,当测量得到{f1}和{f2}的位姿后,得到左侧六自由度并联机器人与右侧六自由度并联机器人之间的基坐标系转换关系;s24,以激光跟踪仪的测量坐标系{l}o
l
–
xyz作为参考,定义左侧六自由度并联机器人上的环形夹装台的坐标系为{d}o
d-xyz,右侧六自由度并联机器人的环形夹装台的坐标系为{e}o
e
–
xyz;利用第三坐标系定位板、第三坐标系定位板测量得到的两个坐标系分别为{f3}和{f4};s25,带定位孔的第一大型构件的对接面坐标系{d1}o
d1
–
xyz,带定位销的第二大型构件的对接面坐标系{e1}o
e1
–
xyz在参考坐标系下的坐标方向均与参考坐标系一致,通过靶球放置在对接面上的固定位置,确定带定位孔的第一大型构件的对接面坐标系{d1}o
d1
–
xyz和{d}o
d
–
xyz,带定位销的第二大型构件的对接面坐标系{e1}o
e1
–
xyz和{e}o
e
–
xyz之间的转换关系;s26,而坐标系{d}o
d
–
xyz与{f3}、坐标系{e}o
e
–
xyz与{f4}之间的转换关系已知,根据所述{f3}和{f4}的位姿,得到带定位孔的第一大型构件和带定位销的第二大型构件之间的转换关系;s27,通过步骤s21至步骤s26得到带定位孔的第一大型构件的对接面坐标系{d1}o
d1
–
xyz与左侧六自由度并联机器人的基坐标系{m}o
m
–
xyz之间的转换关系,带定位销的第二大型构件的对接面坐标系{e1}o
e1
–
xyz与右侧六自由度并联机器人的基坐标系{n}o
m
–
xyz之间的转换关系。8.根据权利要求5所述的大型构件自动化对接引导方法,其特征在于,所述s3为:s31,将左侧六自由度并联机器人和右侧六自由度并联机器人的末端位姿以及带定位孔的第一大型构件和带定位销的第二大型构件的对接面位姿均表达在坐标系{l}o
l
–
xyz中;s32,选择两个对接面的坐标系原点连线的中点作为最终对接位置,姿态矩阵均为单位矩阵,左侧六自由度并联机器人和右侧六自由度并联机器人同时运动,将对接过程进行分段测量;s33,根据以上数据分别控制左侧六自由度并联机器人和右侧六自由度并联机器人进行运动,改变带定位孔的第一大型构件和带定位销的第二大型构件的相对位姿;s34,左侧六自由度并联机器人和右侧六自由度并联机器人完成每一阶段运动后,重新
测量{f3}和{f4}坐标系的相对位姿,并将相对位姿转换为带定位孔的第一大型构件的对接面坐标系{d1}o
d1
–
xyz,带定位销的第二大型构件的对接面坐标系{e1}o
e1
–
xyz的相对位姿。
技术总结
本发明公开了一种大型构件自动化对接并联机构装置及引导方法,该系统主要包含两台六自由度并联机器人、一台激光跟踪仪、多个坐标系定位板以及环形夹装台;左侧六自由度并联机器人和右侧六自由度并联机器人的下平面分别固定两个坐标系定位板,主要是用于实现六自由度并联机器人基坐标系的测量。环形夹装台的侧面固定安装坐标系定位板,主要是用于实现大型构件的位姿测量。根据大型构件的相对位姿误差,控制左侧六自由度并联机器人和右侧六自由度并联机器人的运动。本发明利用两个六自由度并联机器人进行自动化对接,从而提升对接系统的对接效率。采用分段式对接过程,既实现过程误差校正,又降低六自由度并联机器人的长距离运行精度。运行精度。运行精度。
技术研发人员:相铁武 左洪福 杨健 王赛进 王刚 徐大桐
受保护的技术使用者:南京全控电子科技有限公司
技术研发日:2022.12.07
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。