技术特征:
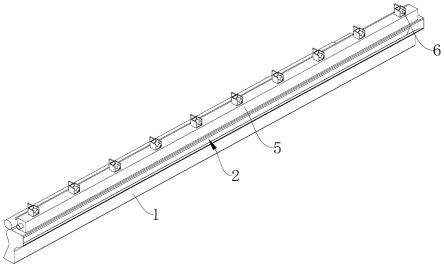
1.一种桁架式码垛机器人,其特征在于:包括设置在车厢外部的底座(1),所述底座(1)包括安装座(101)和能够沿车厢宽度方向移动的安装板(102),所述安装板(102)上设置有纵梁(2),所述纵梁(2)上设置有能够延伸至车厢内部的横梁(3),所述横梁(3)上连接有连接件(4);所述安装板(102)上设置有置物平台(5);所述横梁(3)上通过所述连接件(4)连接有用于吸取物料的吸盘(601),所述吸盘(601)始终位于所述置物平台(5)的上方;所述横梁(3)上设置有带动所述连接件(4)转动的旋转驱动件(7),所述连接件(4)上设置有带动所述吸盘(601)转动的吸盘旋转驱动件(8);所述安装板(102)上设置有用于带动所述安装板(102)移动的安装板平动组件(9),所述纵梁(2)上设置有用于带动所述横梁(3)上下移动的升降组件(10),所述纵梁(2)上还设置有用于带动所述横梁(3)移动的横梁平动组件(11),所述横梁(3)上还设置有用于带动所述吸盘(601)沿所述横梁(3)设置方向移动的吸盘平动组件(12)。2.根据权利要求1所述的桁架式码垛机器人,其特征在于:所述安装板平动组件(9)包括两个设置在所述安装座(101)上的安装板平动导轨(901),两个所述安装板平动导轨(901)平行设置,其中一个所述安装板平动导轨(901)上设置有安装板平动齿条(902),所述安装板(102)上设置有安装板平动驱动电机(903),所述安装板平动驱动电机(903)的输出轴固接有安装板平动齿轮(904),所述安装板平动齿轮(904)与所述安装板平动齿条(902)互相啮合。3.根据权利要求2所述的桁架式码垛机器人,其特征在于:所述安装板(102)上设置有能够抱紧所述安装板平动导轨(901)的第一抱紧组件(13)。4.根据权利要求3所述的桁架式码垛机器人,其特征在于:所述第一抱紧组件(13)包括固接在所述安装板(102)上的安装框(1301),所述安装框(1301)内设置有两个竖置滚轮(1302)和一个横置滚轮(1303),两个所述竖置滚轮(1302)分别位于所述安装板平动导轨(901)的上下两侧,两个所述竖置滚轮(1302)的周面始终与所述安装板平动导轨(901)的表面贴合,所述横置滚轮(1303)的周面始终与所述安装板平动导轨(901)的侧面贴合。5.根据权利要求1所述的桁架式码垛机器人,其特征在于:所述升降组件(10)包括设置在两个设置在所述纵梁(2)上的升降导轨(1001),两个所述升降导轨(1001)平行设置,其中一个所述升降导轨(1001)上设置有升降齿条(1002),所述纵梁(2)上连接有升降板(16),所述升降板(16)上设置有升降电机(1003),所述升降电机(1003)的输出轴上固接有升降齿轮(1004),所述升降齿条(1002)和所述升降齿条(1002)互相啮合,所述升降板(16)上设置有用于抱紧所述升降导轨(1001)的第二抱紧组件(14)。6.根据权利要求5所述的桁架式码垛机器人,其特征在于:所述横梁平动组件(11)包括两个设置在所述横梁(3)上的横梁导轨(1101),两个所述横梁导轨(1101)平行设置,其中一个所述横梁导轨(1101)上设置有横梁齿条(1102),所述升降板(16)上设置有横梁平动驱动电机(1103),所述横梁平动驱动电机(1103)的输出轴上固接有横梁平动齿轮(1104),所述横梁平动齿轮(1104)与所述横梁齿条(1102)互相啮合,所述升降板(16)上设置有用于抱紧所述横梁导轨(1101)的第三抱紧组件(15)。7.根据权利要求1所述的桁架式码垛机器人,其特征在于:所述吸盘平动组件(12)包括
两个设置在所述横梁(3)上的v型导轨(1201),两个所述v型导轨(1201)平行设置,其中一个所述v型导轨(1201)上设置有吸盘平动齿条(1202),所述吸盘平动齿条(1202)位于两个所述v型导轨(1201)相对的一侧,所述横梁(3)上连接有平动板(17),所述平动板(17)上设置有吸盘平动驱动电机(1203),所述吸盘平动驱动电机(1203)的输出轴上固接有吸盘平动齿轮(1204),所述吸盘平动齿轮(1204)与所述吸盘平动齿条(1202)互相啮合,所述平动板(17)上设置有用于限位的限位件(18)。8.根据权利要求1所述的桁架式码垛机器人,其特征在于:所述安装座(101)、所述纵梁(2)和所述横梁(3)上均设置有缓冲组件(20)。9.根据权利要求7所述的桁架式码垛机器人,其特征在于:所述平动板(17)和所述安装板(102)上均设置有用于润滑的润滑组件(21)。10.根据权利要求1所述的桁架式码垛机器人,其特征在于:所述纵梁(2)和所述横梁(3)上设置有自动探测装置和机器视觉系统。
技术总结
本申请涉及机器人技术领域,尤其是涉及一种桁架式码垛机器人,其包括底座,底座包括安装座和安装板,安装板上设置有纵梁,纵梁上设置有能够延伸至车厢内部的横梁,横梁上连接有连接件;安装板上设置有置物平台;横梁上通过连接件连接有吸盘;横梁上设置有带动连接件转动的旋转驱动件,连接杆上设置有带动吸盘转动的吸盘旋转驱动件;安装板上设置有用于带动安装板移动的安装板平动组件,纵梁上设置有用于带动横梁移动的升降组件,纵梁上还设置有用于带动横梁移动的横梁平动组件,横梁上还设置有用于带动吸盘移动的吸盘平动组件。本申请具有能够实现对袋装物料的自动化码垛,以改善人工码垛劳动强度高、效率低的问题的效果。效率低的问题的效果。效率低的问题的效果。
技术研发人员:周慧珍 王志巍
受保护的技术使用者:北京摩云阁精密齿条股份有限公司
技术研发日:2022.12.23
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。