1.本发明属于车辆转向系统领域,具体涉及一种双电机线控转向系统及其主动容错控制方法。
背景技术:
2.线控转向系统作为车辆主动安全性的关键总成,主要负责控制车辆的主动转向和对车辆横摆稳定性的控制。线控转向系统相较于传统的车辆转向,取消了转向管柱与车轮之间的部分机械结构,能依据不同驾驶员、不同道路条件自由设计不同的车辆传动比,使之能够同时满足车辆在低速灵活和在高速稳定的要求。
3.在转向执行机构设计部分,为了避免了由于单电机故障而导致的转向执行机构失效的问题,采用双电机结构,实现硬件冗余,提高了系统的响应特性和车辆的安全性。并且,转向系统所需的额定转矩可以由双电机共同承担,减小了单个电机的工作负载,提高转向执行机构的总体效率和使用寿命。
4.现有关于双电机的容错控制,尤其是关于双电机线控转向系统的主动容错控制方法公开较少,例如,中国发明专利申请号为cn201611018430.1中公开了一种基于卡尔曼滤波观测器的执行器故障检测方法;中国发明专利申请号为cn201910136329.3中公开了一种双电机双电源线控转向系统及其容错控制方法,研究在电源故障下的双电机工作模式。
5.现有技术提到的大多数故障诊断方法是基于车辆动力学线性模型模型或固定参数下的容错控制方法,且大多数车辆稳定性控制方法的研究对象为车辆横摆角速度与质心侧偏角,以车辆前轮转角作为研究对象的控制方法较少。
技术实现要素:
6.发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种双电机线控转向系统及其主动容错控制方法,可以实时跟踪车辆的前轮转角信号,跟踪误差精度高;针对回正力矩反馈信号和理想转角输出信号的干扰,设计鲁棒控制器,提升了系统的抗干扰性能;针对双电机的主动容错控制,依据故障形式设计控制信号的故障系数,采用变参数(lpv)模型对线性系统进行优化。
7.所述系统包括信息采集模块、前轮转角跟踪控制模块、变参数模块和转向执行模块;
8.所述信息采集模块包括方向盘(1)、方向盘转角传感器(2)、车速传感器(6)、左侧电机转矩转速传感器(7)、右侧电机转矩转速传感器(12)和控制模块(4);
9.所述方向盘转角传感器(2)与转向管柱固定连接,方向盘转角传感器(2)负责采集由驾驶员输入方向盘的转角信号,并将采集到的信号发送给控制模块(4);
10.所述车速传感器(6)安装在车辆前轮内,用于获得车辆实时车速,并发送给控制模块(4);
11.所述转向执行模块包括执行电机m1(5)、执行电机m2(13)、左侧减速器(8)、右侧减
速器(11)、左侧电机转矩转速传感器(7)、右侧电机转矩转速传感器(12)、左侧传动齿轮(9)、右侧传动齿轮(10)和转向横拉杆;
12.所述左侧电机转矩转速传感器(7)与执行电机m1(5)的输出轴相连,所述右侧电机转矩转速传感器(12)与执行电机m2(13)的输出轴相连,左侧电机转矩转速传感器(7)与右侧电机转矩转速传感器(12)接受对应电机的转速信号,并将双电机的转速信号发送给控制模块(4);
13.所述前轮转角跟踪控制模块接收来自控制模块的信号,包括方向盘转角信号和前轮车速信号,设计随不同车速情况变化的汽车传动比,通过最优控制方法以及线性二次型调节器(linear quadratic regulator,lqr)对前轮转角进行跟踪反馈,计算双电机最优控制率,即双电机输出转矩;同时,在双电机发生故障后,接收变参数模型的双电机故障系数,在线性二次型调节器(lqr)前轮反馈的基础上设计鲁棒性控制方法,减少因系统内部误差对前轮转角跟踪反馈的干扰;
14.所述变参数模块基于线性变参数模型(linear parameter varying,lpv)设计,用于接收来自控制模块(4)的双电机转角信号,通过与线性二次型调节器(lqr)控制器的输出控制转矩比较,计算各电机的故障系数,将系统优化为包含故障参数的非线性模型。
15.所述转向执行模块通过双电机转向执行系统的动力学模型,接收来自前轮转角跟踪控制模块中lqr控制器所计算的双电机控制转矩,计算在控制信号下转向执行系统所得的实际前轮转角。
16.所述左侧电机转矩转速传感器(7)连接在执行电机m1(5)的输出轴上,所述右侧电机转矩转速传感器(12)连接在执行电机m2(13)的输出轴上;所述执行电机m1(5)通过左侧减速器(8)和左侧传动齿轮(9)相连,所述执行电机m2(13)通过右侧减速器(11)和右侧传动齿轮(10)相连;所述左侧传动齿轮(9)、右侧传动齿轮(10)同时和所述齿条啮合;所述齿条与转向横拉杆固连;转向横拉杆分别连接左右车前轮(6)。
17.本发明还提供了一种双电机线控转向系统的主动容错控制方法,包括如下步骤:
18.步骤1,建立理想前轮转角与方向盘转角关系,设计变传动比,求解理想前轮转角;
19.步骤2,建立车辆双电机转向执行系统及其动力学模型;
20.步骤3,根据理想前轮转角与双电机转向执行系统模型,设计转角跟踪控制器;
21.步骤4,根据电机转矩传感器信号与线性二次型调节器lqr输出的控制信号,设计双电机故障系数,并完成电机容错控制。
22.进一步地,步骤1包括:车辆在行驶过程中,当驾驶员转动方向盘时,通过方向盘转角传感器(2)采集转角信号θ
sw
,通过前轮的车速传感器(6)采集车辆纵向车速信号u,得到此时理想前轮转角信号与方向盘转角信号θ
sw
的关系式如下:
[0023][0024]
其中,is为车辆传动比,根据车辆不同车速进行变化;ku为不足转向系数,a为质心到前轴轴距;b为质心到后轴轴距;l为前后轴轴距;m为整车质量;k1、k2分别为前、后轮侧偏刚度;ks为横摆角速度系数,该范围为0.12-0.37s-1
。
[0025]
进一步地,所述步骤2具体包括:
[0026]
双电机转向执行系统的动力学模型为:
[0027][0028]
双电机转向执行系统的动力学模型是基于车辆的齿轮齿条传动机构,依据实际受力情况的动力学模型;
[0029]
其中xr为齿条横向位移,与分别为xr的一阶导数与二阶导数;θs为小齿轮转角,δf为前轮转角,mr为齿条质量;br为齿条阻尼系数;fr为齿条横向摩擦阻力;sgn(x)表示符号函数;r
p
为小齿轮半径;t
g1
为执行电机m1控制转矩,t
g2
为执行电机m2控制转矩,t
eq
为双电机控制转矩之和;fr为等效横摆阻力;tr为齿条等效横摆阻力矩;mz为回正力矩;k
t
为电磁转矩系数;g1为执行电机减速比;η为执行电机的传动效率;g2是从齿条到轮胎的传动比;
[0030]
综合车辆双电机转向执行系统的动力学模型,得出关于车辆前轮转角与双电机控制转矩的状态空间方程,取状态空间模型的状态变量状态变量的一阶微分信号为其中,与分别为前轮转角的一阶微分信号与二阶微分信号;系统输入量为双电机控制转矩u=[t
g1 t
g2
]
t
,系统干扰量系统输出为实际前轮转角y=δf,建立双电机线控转向系统的状态空间模型如下:
[0031][0032]
其中,a、b1、b2、c为状态空间矩阵,、c为状态空间矩阵,c=[1 0];
[0033]
将上述车辆双电机转向执行系统的动力学模型所得的实际前轮转角信号δf和纵向车速信号u作为输入,采用车辆二自由度模型,计算车辆的状态参数,包括横摆角速度ωr、质心侧偏角β和前轮侧偏角αf,所述的车辆二自由度运动微分方程为:
[0034][0035]
式中,iz为车辆转动惯量,1983.8kgm^2。与分别为对应参数的一阶微分信号;
[0036]
轮胎模型简化为线性模型,计算轮胎回正力矩mz:
[0037]
其中,t
p
与tm分别为主销自身引起的拖距和轮胎自身引起的拖距,它们的和为轮胎拖距,一般为0.05m;
[0038]
轮胎的回正力矩会从前轮,通过机械结构转换为等效横摆阻力作用在齿条上。
[0039]
进一步地,步骤3中,所述转角跟踪控制器包括:前轮转角跟踪控制器与车辆稳定性控制器;
[0040]
其中,采用如下方法设计前轮转角跟踪控制器:
[0041]
基于线性二次型调节器lqr控制算法,结合步骤1中的理想前轮转角信号步骤2中的车辆双电机转向执行系统的动力学模型所得到的实际输出信号y=δf,残差为设计前轮转角跟踪控制器过程如下:
[0042]
设计线性二次型代价函数j为:化简为:
[0043]
其中,q为残差e的权重系数矩阵;r为双电机控制量的权重系数矩阵,dt是积分项;
[0044]
通过选取合适的权重系数矩阵q,使得系统的线性二次型代价函数j在可行域内存在最小值,能够满足前轮转角残差值e最小的设计要求;
[0045]
引入拉格朗日参数γ,对代价函数j取哈密顿函数h如下:
[0046]
h=((y
r-cx)
t
q(y
r-cx) u
t
ru) γ
t
(ax bu)
[0047]
由极小值定理
[0048]
计算得闭环系统最优控制率为u=-r-1bt
γ
[0049]
其中,拉格朗日参数γ为关于的非齐次线性方程组的解,设λ=px-ξ,px为对应齐次方程组的通解,ξ为非齐次方程组的一组特解,且p、ξ满足riccati方程如下:
[0050][0051]
所以,最优控制率也可以表示为:u=-r-1bt
(px-ξ)
[0052]
步骤3中,采用如下方法设计车辆稳定性控制器:
[0053]
构造增广系统状态方程组如下:
[0054][0055]
其中,增广状态向量对应的一阶微分向量增广输出向量增广系统的控制矩阵输入矩阵输出矩阵ρ为误差向量的系数矩阵;
[0056]
构造增广系统代价函数
[0057][0058]
增广系统状态向量的权重系数矩阵为双电机控制信号u
*
的权重系数矩阵
[0059]
对应增广系统的增益系数矩阵其中,k1为对应状态量的反馈矩阵;k2为对应误差量的反馈矩阵;
[0060]
仍然满足riccati方程:是满足ricctia方程的对称正定解,
[0061]
增广系统的双电机控制率
[0062]
步骤4包括:
[0063]
常见的电机失效形式主要包括如下形式:
[0064]
电机部分失效是指电机转向动力不足,功率下降,描述为:
[0065]
电机中断是指转向系统失灵,电机无法执行指令,描述为:
[0066]
表示第i个电机的转矩传感器输入信号;λi表示第i个电机的故障系数,满足0≤λ≤1;ui表示第i个电机的控制信号;
[0067]
则双电机控制转矩总结为用uf表示两个电机在执行器发生故障后的实际转矩信号;其中,λ1与λ2均满足0≤λ≤1;
[0068]
根据左侧电机转矩传感器与右侧电机转矩传感器的测量信号,分别记作线性二次型(lqr)控制器所输出的双电机控制信号分别为u1、u2;
[0069]
第i个电机的故障系数计算公式为:
[0070]
所以基于变参数(lpv)模块的双电机线控转向系统动力学模型化简为:
[0071][0072]
化简得:
[0073]
其中,
[0074]
选取双转向电机故障系数λ1、λ2为变参数,进行转向执行机构的多胞形变参数(lpv)系统建模,由变参数λ1、λ2组成含有4个顶点的多胞形模型,4个顶点的坐标分别为:
[0075]
q1=(0,0);q2=(1,0);q3=(0,1);q4=(1,1);
[0076]
线性时变的系统矩阵和输入控制矩阵更新为:
[0077][0078]
其中,φ0表示系统矩阵与控制矩阵常数项的集合,包括a
a0
、b
ua0
、b
wa0
;φ1表示矩阵关于λ1的项的集合,包括a
a1
、b
ua1
、b
wa1
;φ2表示矩阵关于λ2的项的集合,包括a
a2
、b
ua2
、b
wa2
;
[0079]
式中,
[0080]
将多胞形模型的四个顶点q1、q2、q3、q4的双电机故障系数λ1、λ2代入更新后的系统矩阵和输入控制矩阵得到四个顶点的局部状态矩阵分别如下:
[0081][0082]
式中,第j个顶点对应的局部系统矩阵为a
bj
、局部输入控制矩阵为b
ubj
、b
wbj
;
[0083]
设定取样时间t,采用欧拉方法对各顶点处状态空间的系统模型进行离散化,各顶点处的权重系数αj的计算公式为:
[0084][0085]
系统的离散化模型化简为:
[0086]
所述新模型的系统矩阵与输入矩阵的计算公式为:
[0087]
其中,a
bj
为第j个顶点对应的局部系统矩阵;b
ubj
与b
wbj
为局部输入控制矩阵;ρ1与ρ2为关于两个电机故障参数的权重系数;αj为各顶点的权重系数;i为单位阵;
[0088]
步骤4中,最终得到如下所示的基于变参数模块(lpv)的转向执行机构的离散化数学模型:
[0089][0090]
系统状态矩阵如下:
[0091][0092]
对于含有变参数λ1、λ2的新的离散系统,采用线性二次型(lqr)控制器计算当前可行域内的最优控制率,过程如下:
[0093]
仍然引入拉格朗日参数采用哈密顿函数和极小值原理,在电机故障时,双电机的最优控制率为:
[0094][0095]
其中,是满足下列riccati方程组的唯一正定解:
[0096][0097]
本发明的有益效果在于:
[0098]
本发明基于线性二次型最优控制器(lqr)控制算法在输出跟踪反馈系统的优势,通过研究车辆外界干扰设计相应的闭环系统,对闭环系统进行鲁棒性控制,提高了车辆转向的稳定性。同时,本发明设计了关于电机故障参数的变参数模型(lpv),对双电机进行控制信号补偿,使得电机在故障后仍能保持车辆行驶安全性。
[0099]
本发明的方法简单,为解决汽车转向系统控制拓宽了研究思路。
附图说明
[0100]
下面结合附图和具体实施方式对本发明做更进一步的具体说明,本发明的上述其他方面的优点将会变得更加清楚。
[0101]
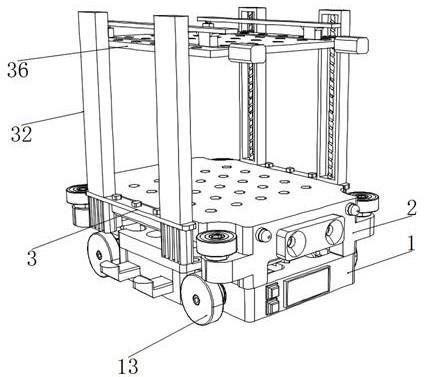
图1为本发明转向系统结构原理图。
[0102]
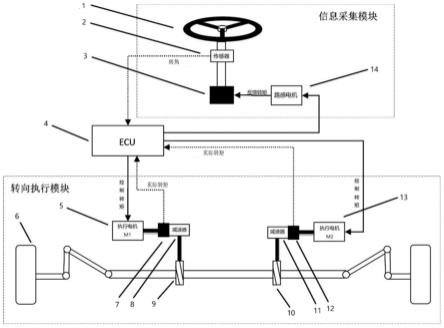
图2为本发明含变参数模型(lpv)的双电机转角跟踪控制原理图。
具体实施方式
[0103]
实施例
[0104]
本实施例提供了一种双电机线控转向系统及其主动容错控制方法,所述系统如图1所示,其中1为方向盘,2为方向盘转角传感器,3为路感电机反馈转矩传感器,4为控制模块,5为左侧m1电机,6为前部轮胎,7为左侧电机转角转矩传感器,8为减速器1,9为传动齿轮1,10为传动齿轮2,11为减速器2,12为右侧电机转角转矩传感器,13为右侧m2电机,14为路感电机。
[0105]
本实施例方法流程如图2所示,针对前轮主动转向汽车,建立转向系统动力学模型,同时利用车载轮速传感器和方向盘转角传感器信息,建立转角跟踪控制系统的外部输入量和观测量,具体实施为:
[0106]
步骤1,通过方向盘转角传感器采集转角信号θ
sw
,轮速传感器采集该时刻的纵向车速信号u,分别为2πrad和20m/s,此信号可以通过仿真软件carsim得到。
[0107]
设计主动转向汽车的传动比:
[0108][0109]
式中,ku为不足转向系数,a为质心到前轴轴距,0.983m;b为质心到后轴轴距,1.596m;l为汽车轴距,2.579m;m为整车质量,1283.9kg;k1、k2为前后轮胎侧偏刚度,本实施例中分别为-95000n/rad、-90000n/rad;ks为横摆角速度系数,范围为0.12-0.37s-1
。
[0110]
步骤2,建立车辆双电机转向执行系统的动力学模型;
[0111]
车辆双电机转向执行系统的动力学模型为:
[0112][0113]
综合上述的动力学模型,得出关于车辆前轮转角与双电机控制电流的状态空间方程,取状态空间模型的状态变量为系统输入量为双电机输出转矩u=[t
g1 t
g2
]
t
,系统干扰量为系统输出为实际前轮转角y=δf,建立双电机线控转向系统的状态空间模型如下:
[0114][0115]
其中,
[0116]
式中,mr为齿条质量,2kg;br为齿条阻尼系数,90n/m;r
p
为小齿轮半径,0.007367m;fr为等效横摆阻力;fr为摩擦阻力;mz为回正力矩;k
t
为电磁转矩系数,0.065nm/a;g1为执行电机减速比,8;η为执行电机的传动效率,98%;g2是从齿条到轮胎的传动比,0.14。
[0117]
将上述车辆双电机转向执行系统的动力学模型所得的实际前轮转角信号δf和纵向车速信号u作为输入,采用车辆二自由度模型,计算车辆的状态参数,包括横摆角速度ωr、质心侧偏角β和前轮侧偏角αf,所述的车辆二自由度运动微分方程为:
[0118][0119]
式中,iz为车辆转动惯量,1983.8kgm^2。
[0120]
轮胎模型简化为线性模型,计算轮胎回正力矩mz:
[0121]
式中,(t
p
tm)为轮胎拖距,0.05m;
[0122]
轮胎的回正力矩会从前轮,通过机械结构转换为等效横摆阻力作用在齿条上。
[0123]
步骤3,设计前轮转角跟踪控制器及稳定性控制器;
[0124]
进一步地,所述步骤3中前轮转角跟踪控制器具体包括:
[0125]
根据步骤2中所述的车辆双电机转向执行系统的动力学模型,表示为:
[0126][0127]
式中,x为状态变量,u为控制变量,w为系统噪声向量,y为系统量测输出。
[0128]
设计二次型性能代价函数,表示为:
[0129][0130]
研究系统无限时域内跟踪问题,设终端时间tf=∞,误差向量其中期望输出向量实际输出向量y=δf;
[0131]
化简为:
[0132]
通过选取合适的增益矩阵,可以使得对应的系统二次型代价函数获得最小值,即满足前轮转角误差量最小的设计要求;
[0133]
选取合适的增益矩阵q为半正定矩阵、r为正定矩阵,q=100,
[0134]
研究上述转向系统误差模型的能观能控性矩阵表明系统是可观可控的,引入拉格朗日参数γ,对上述代价函数j取哈密顿函数如下:
[0135]
h=((y
r-cx)
t
q(y
r-cx) u
t
ru) γ
t
(ax bu)
[0136]
依据极小值原理设计闭环系统的最优控制率为u=-r-1bt
λ=-r-1bt
(px-ξ),过程如下:
[0137]
由极小值定理
[0138]
计算得闭环系统最优控制率为u=-r-1bt
γ
[0139]
其中,拉格朗日参数γ为关于的非齐次线性方程组的解,设λ=px-ξ,px为对应齐次方程组的通解,ξ为非齐次方程组的一组特解,且p、ξ满足riccati方程如下:
[0140][0141]
所以,最优控制率也可以表示为:u=-r-1bt
(px-ξ)
[0142]
进一步地,所述步骤3中车辆稳定性控制具体包括:
[0143]
由线性二次型(lqr)控制器设计的跟踪控制率基本可以跟踪给定的理想前轮转角
信号,但是由于存在回正力矩等干扰项,需要研究系统的稳定性来消除干扰向量对系统的影响,由此设计了相应的最优鲁棒控制器。
[0144]
设计最优鲁棒控制器所需的控制率由伺服补偿器和镇定补偿器两部分提供,且该系统所有状态可观测,镇定补偿器所提供的可由系统状态来表示,具体公式化简为:
[0145]
u(t)=k1ξ(t) k2η(t)=k1ξ(t) k2x(t)
[0146]
构造如下增广系统状态方程:
[0147][0148]
其中,增广状态向量增广输出向量增广输出向量ρ为误差向量的系数矩阵;
[0149]
构造增广系统代价函数:
[0150][0151]
选取合适的增广增益矩阵
[0152]
仍然满足riccati方程:是满足ricctia方程的对称正定解,对应增广系统的增益系数矩阵
[0153]
控制率
[0154]
本发明中含有变参数的lpv的双电机线控转向系统模型具体实施为:
[0155]
由于电机的故障形式主要分为电机部分失效、中断和卡死三种情况,针对部分失效和中断故障,将系统控制量化为如下形式:
[0156]
电机部分失效是指电机转向动力不足,功率下降,描述为:
[0157]
电机中断是指转向系统失灵,电机无法执行指令,描述为:
[0158]
于是双电机控制转矩总结为
[0159]
式中,λ1与λ2均满足0≤λ≤1;
[0160]
根据左侧电机转矩传感器与右侧电机传感器的测量信号,分别记作线性二次型(lqr)控制器所输出的双电机控制信号分别为u1、u2;
[0161]
第i个电机的故障系数计算公式为:
[0162]
所以基于变参数模型(lpv)的双电机线控转向系统模型化简为:
[0163]
化简得:
[0164]
其中,选取双转向电机故障系数λ1、λ2为变参数,进行转向执行机构的多胞形变参数(lpv)系统建模,由变参数λ1、λ2组成含有4个顶点的多胞形模型,4个顶点的坐标分别为:
[0165]
q1=(0,0);q2=(1,0);q3=(0,1);q4=(1,1)。
[0166]
进一步的,线性时变的系统矩阵和输入控制矩阵为:
[0167][0168]
式中,
[0169][0170]
将多胞形模型的四个顶点的双电机故障系数λ1、λ2代入上式,得到四个顶点的局部状态矩阵分别如下:
[0171]
[0172]
取取样时间t=0.1s,采用欧拉方法对各顶点处状态空间的系统模型进行离散化
[0173]
,各顶点处的权重系数αj的计算公式为:
[0174][0175]
系统的离散化模型化简为:x(k 1)=ax(k) buu(k) bww(k)
[0176]
其中
[0177]
最终得到如下所示的基于变参数模块(lpv)的转向执行机构的离散化数学模型:
[0178][0179]
系统状态矩阵如下:
[0180][0181]
对于上述含有变参数λ1、λ2的新的离散系统,采用线性二次型(lqr)控制器计算当前可行域内的最优控制率,过程如下:
[0182]
仍然引入拉格朗日参数采用哈密顿函数和极小值原理计算得,在电机故障时,双电机的最优控制率为:
[0183][0184]
其中,是满足下列riccati方程组的唯一正定解:
[0185][0186]
具体实现中,本技术提供计算机存储介质以及对应的数据处理单元,其中,该计算机存储介质能够存储计算机程序,所述计算机程序通过数据处理单元执行时可运行本发明提供的一种双电机线控转向系统及其主动容错控制方法的发明内容以及各实施例中的部分或全部步骤。所述的存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)或随机存储记忆体(random access memory,ram)等。
[0187]
本领域的技术人员可以清楚地了解到本发明实施例中的技术方案可借助计算机程序以及其对应的通用硬件平台的方式来实现。基于这样的理解,本发明实施例中的技术方案本质上或者说对现有技术做出贡献的部分可以以计算机程序即软件产品的形式体现
出来,该计算机程序软件产品可以存储在存储介质中,包括若干指令用以使得一台包含数据处理单元的设备(可以是个人计算机,服务器,单片机。muu或者网络设备等)执行本发明各个实施例或者实施例的某些部分所述的方法。
[0188]
本发明提供了一种双电机线控转向系统及其主动容错控制方法,具体实现该技术方案的方法和途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本实施例中未明确的各组成部分均可用现有技术加以实现。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。