技术特征:
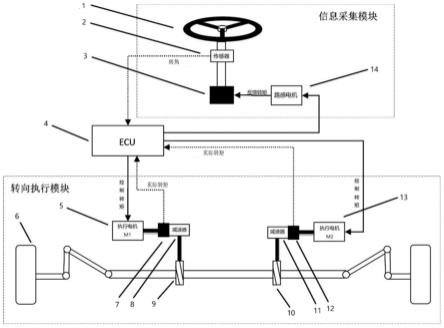
1.一种双电机线控转向系统,其特征在于,包括信息采集模块、前轮转角跟踪控制模块、变参数模块和转向执行模块;所述信息采集模块包括方向盘(1)、方向盘转角传感器(2)、车速传感器(6)、左侧电机转矩转速传感器(7)、右侧电机转矩转速传感器(12)、控制模块(4);所述方向盘转角传感器(2)与转向管柱固定连接,方向盘转角传感器(2)负责采集由驾驶员输入方向盘的转角信号,并将采集到的信号发送给控制模块(4);所述车速传感器(6)安装在车辆前轮内,用于获得车辆实时车速,并发送给控制模块(4);所述转向执行模块包括执行电机m1(5)、执行电机m2(13)、左侧减速器(8)、右侧减速器(11)、左侧电机转矩转速传感器(7)、右侧电机转矩转速传感器(12)、左侧传动齿轮(9)、右侧传动齿轮(10)和转向横拉杆;所述左侧电机转矩转速传感器(7)与执行电机m1(5)的输出轴相连,所述右侧电机转矩转速传感器(12)与执行电机m2(13)的输出轴相连,左侧电机转矩转速传感器(7)与右侧电机转矩转速传感器(12)接受对应电机的转速信号,并将双电机的转速信号发送给控制模块(4);所述前轮转角跟踪控制模块接收来自控制模块(4)的信号,包括方向盘转角信号和前轮车速信号,设计随不同车速情况变化的汽车传动比,通过最优控制方法以及线性二次型调节器lqr对前轮转角进行跟踪反馈,计算双电机最优控制率,即双电机输出转矩;同时,在双电机发生故障后,接收变参数模型的双电机故障系数,在线性二次型调节器lqr前轮反馈的基础上设计鲁棒性控制方法;所述变参数模块基于线性变参数模型设计,用于接收来自控制模块(4)的双电机转角信号,通过与线性二次型调节器控制器的输出控制转矩比较,计算各电机的故障系数,将系统优化为包含故障参数的非线性模型。2.根据权利要求1所述的系统,其特征在于,所述转向执行模块通过双电机转向执行系统的动力学模型,接收来自前轮转角跟踪控制模块中lqr控制器所计算的双电机控制转矩,计算在控制信号下转向执行系统所得的实际前轮转角。3.根据权利要求2所述的系统,其特征在于,所述左侧电机转矩转速传感器(7)连接在执行电机m1(5)的输出轴上,所述右侧电机转矩转速传感器(12)连接在执行电机m2(13)的输出轴上;所述执行电机m1(5)通过左侧减速器(8)和左侧传动齿轮(9)相连,所述执行电机m2(13)通过右侧减速器(11)和右侧传动齿轮(10)相连;所述左侧传动齿轮(9)、右侧传动齿轮(10)同时和所述齿条啮合;所述齿条与转向横拉杆固连;转向横拉杆分别连接左右车前轮(6)。4.一种双电机线控转向系统的主动容错控制方法,其特征在于,包括如下步骤:步骤1,建立理想前轮转角与方向盘转角关系,设计变传动比,求解理想前轮转角;步骤2,建立车辆双电机转向执行系统及其动力学模型;步骤3,根据理想前轮转角与双电机转向执行系统的动力学模型,设计转角跟踪控制器;步骤4,根据电机转矩传感器信号与线性二次型调节器lqr输出的控制信号,设计双电机故障系数,并完成电机容错控制。
5.根据权利要求4所述的方法,其特征在于,步骤1包括:车辆在行驶过程中,当驾驶员转动方向盘时,通过方向盘转角传感器(2)采集转角信号θ
sw
,通过前轮的车速传感器(6)采集车辆纵向车速信号u,得到此时理想前轮转角信号与方向盘转角信号θ
sw
的关系式如下:其中i
s
为车辆传动比,根据车辆不同车速进行变化;k
u
为不足转向系数,a为质心到前轴轴距;b为质心到后轴轴距;l为前后轴轴距;m为整车质量;k1、k2分别为前轮侧偏刚度、后轮侧偏刚度;k
s
为横摆角速度系数。6.根据权利要求5所述的方法,其特征在于,步骤2包括:双电机转向执行系统的动力学模型为:双电机转向执行系统的动力学模型是基于车辆的齿轮齿条传动机构,依据实际受力情况的动力学模型;其中x
r
为齿条横向位移,与分别为x
r
的一阶导数与二阶导数;θ
s
为小齿轮转角,δ
f
为前轮转角,m
r
为齿条质量;b
r
为齿条阻尼系数;f
r
为齿条横向摩擦阻力;sgn表示符号函数;r
p
为小齿轮半径;t
g1
为执行电机m1控制转矩,t
g2
为执行电机m2控制转矩,t
eq
为双电机控制转矩之和;f
r
为等效横摆阻力;t
r
为齿条等效横摆阻力矩;m
z
为回正力矩;k
t
为电磁转矩系数;g1为执行电机减速比;η为执行电机的传动效率;g2是从齿条到轮胎的传动比;综合车辆双电机转向执行系统的动力学模型,得出关于车辆前轮转角与双电机控制转矩的状态空间方程,取状态空间模型的状态变量状态变量的一阶微分信号为其中,与分别为前轮转角的一阶微分信号与二阶微分信号;系统输入量为双电机控制转矩u=[t
g1 t
g2
]
t
,系统干扰量系统输出为实际前轮转角y=δ
f
,建立双电机线控转向系统的状态空间模型如下:
其中,a、b1、b2、c为状态空间矩阵,、c为状态空间矩阵,c=[1 0];将上述车辆双电机转向执行系统的动力学模型所得的实际前轮转角信号δ
f
和纵向车速信号u作为输入,采用车辆二自由度模型,计算车辆的状态参数,包括横摆角速度ω
r
、质心侧偏角β和前轮侧偏角α
f
,所述的车辆二自由度运动微分方程为:式中,i
z
为车辆转动惯量;与分别为对应参数的一阶微分信号;轮胎模型简化为线性模型,计算轮胎回正力矩m
z
:其中,t
p
与t
m
分别为主销自身引起的拖距和轮胎自身引起的拖距,它们的和为轮胎拖距。7.根据权利要求6所述的方法,其特征在于,步骤3中,所述转角跟踪控制器包括:前轮转角跟踪控制器与车辆稳定性控制器;其中,采用如下方法设计前轮转角跟踪控制器:基于线性二次型调节器lqr控制算法,结合步骤1中的理想前轮转角信号步骤2中的车辆双电机转向执行系统的动力学模型所得到的实际输出信号y=δ
f
,残差为设计前轮转角跟踪控制器过程如下:设计线性二次型代价函数j为:化简为:其中,q为残差e的权重系数矩阵;r为双电机控制量的权重系数矩阵,dt是积分项;通过选取合适的权重系数矩阵q,使得系统的线性二次型代价函数j在可行域内存在最小值,能够满足前轮转角残差值e最小的设计要求;引入拉格朗日参数γ,对代价函数j取哈密顿函数h如下:h=((y
r-cx)
t
q(y
r-cx) u
t
ru) γ
t
(ax bu)由极小值定理计算得闭环系统最优控制率为u=-r-1
b
t
γ其中,拉格朗日参数γ为关于的非齐次线性方程组的解,设λ=px-ξ,px为
对应齐次方程组的通解,ξ为非齐次方程组的一组特解,且p、ξ满足riccati方程如下:所以,最优控制率表示为:u=-r-1
b
t
(px-ξ)8.根据权利要求7所述的方法,其特征在于,步骤3中,采用如下方法设计车辆稳定性控制器:构造增广系统状态方程组如下:其中,增广状态向量对应的一阶微分向量增广输出向量增广系统的控制矩阵输入矩阵输出矩阵ρ为误差向量的系数矩阵;构造增广系统代价函数构造增广系统代价函数增广系统状态向量的权重系数矩阵为双电机控制信号u
*
的权重系数矩阵对应增广系统的增益系数矩阵其中,k1为对应状态量的反馈矩阵;k2为对应误差量的反馈矩阵;仍然满足riccati方程:仍然满足riccati方程:是满足ricctia方程的对称正定解;增广系统的双电机控制率9.根据权利要求8所述的方法,其特征在于,步骤4包括:电机失效形式包括如下形式:电机部分失效是指电机转向动力不足,功率下降,描述为:电机中断是指转向系统失灵,电机无法执行指令,描述为:电机中断是指转向系统失灵,电机无法执行指令,描述为:表示第i个电机的转矩传感器输入信号;λ
i
表示第i个电机的故障系数,满足0≤λ≤1;u
i
表示第i个电机的控制信号;则双电机控制转矩总结为用u
f
表示两个电机在执行器发生故障后的实际转矩信号;其中,λ1与λ2均满足0≤λ≤1;
根据左侧电机转矩传感器与右侧电机转矩传感器的测量信号,分别记作线性二次型lqr控制器所输出的双电机控制信号分别为u1、u2;第i个电机的故障系数计算公式为:所以基于变参数lpv模块的双电机线控转向系统动力学模型化简为:化简得:其中,选取双转向电机故障系数λ1、λ2为变参数,进行转向执行机构的多胞形变参数lpv系统建模,由变参数λ1、λ2组成含有4个顶点的多胞形模型,4个顶点的坐标分别为:q1=(0,0);q2=(1,0);q3=(0,1);q4=(1,1);线性时变的系统矩阵和输入控制矩阵更新为:其中,φ0表示系统矩阵与控制矩阵常数项的集合,包括a
a0
、b
ua0
、b
wa0
;φ1表示矩阵关于λ1的项的集合,包括a
a1
、b
ua1
、b
wa1
;φ2表示矩阵关于λ2的项的集合,包括a
a2
、b
ua2
、b
wa2
;式中,将多胞形模型的四个顶点q1、q2、q3、q4的双电机故障系数λ1、λ2代入更新后的系统矩阵和输入控制矩阵得到四个顶点的局部状态矩阵分别如下:
式中,第j个顶点对应的局部系统矩阵为a
bj
、局部输入控制矩阵为b
ubj
、b
wbj
;设定取样时间t,采用欧拉方法对各顶点处状态空间的系统模型进行离散化,各顶点处的权重系数α
j
的计算公式为:系统的离散化模型化简为:新模型的系统矩阵与输入矩阵的计算公式为:其中,a
bj
为第j个顶点对应的局部系统矩阵;b
ubj
与b
wbj
为局部输入控制矩阵;ρ1与ρ2为关于两个电机故障参数的权重系数;α
j
为各顶点的权重系数;i为单位阵。10.根据权利要求9所述的方法,其特征在于,步骤4中,最终得到如下所示的基于变参数模块lpv的转向执行机构的离散化数学模型:系统状态矩阵如下:
对于含有变参数λ1、λ2的新的离散系统,采用线性二次型lqr控制器计算当前可行域内的最优控制率,过程如下:引入拉格朗日参数采用哈密顿函数和极小值原理,在电机故障时,双电机的最优控制率为:其中,是满足下列riccati方程组的唯一正定解:
技术总结
本发明提供了一种双电机线控转向系统及其主动容错控制方法,所述方法包括:车辆前轮转角跟踪控制器、车辆稳定性控制器以及基于变参数模型(LPV)设计的非线性模型控制方法。前轮转角跟踪控制器与稳定性控制器是基于线性二次型调节器(LQR)以及最优控制算法设计的,包括:求解理想前轮转角;建立车辆双电机转向执行系统的动力学模型;根据理想前轮转角与转向系统动力学模型,设计转角跟踪控制器及稳定性控制器。双电机主动容错控制包括:通过双电机转矩传感器与前轮转角跟踪控制器输出的控制转矩比较,计算故障系数,将转向执行机构模型优化为含电机故障参数的变参数(LPV)非线性结构。本发明能够保障双电机故障后的车辆安全性。性。性。
技术研发人员:张寒 蒋文韬 李源浩
受保护的技术使用者:南京航空航天大学
技术研发日:2022.11.24
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。