1.本实用新型涉及扎带机技术领域,具体为一种手持式全自动扎带机。
背景技术:
2.对于日常的工作中接触大量的捆扎物品的行业,手持式全自动扎带机使用较为广泛,对于此类行业来说,通过使用手持式全自动扎带机能够很迅速的完成物品的打包,对于进行销售或者邮寄来说非常的节省时间和精力。
3.其次,由于手持式全自动扎带机的动作固定,捆扎效果比较稳定,使捆扎的整齐度也更好。通过手持式全自动扎带机打包的产品相对于人工打包来说不仅速度快,而且更美观,降低企业的成本同时效果更好。
4.但是如申请号为cn201520570574.2已公开的实用新型专利所述,“包括用于将扎带送入送料管道的送料机构、扳机机构、穿扎带机构、扎带拉紧机构、扎带切断机构和传动机构;所述送料机构上设有将扎带吹入送料管道及将送料管道的扎带吹入穿扎带机构的封闭吹气装置,所述扳机机构与封闭吹气装置相连;所述传动机构分别与扎带拉紧机构和扎带切断机构驱动连接;所述送料机构通过送料管道与穿扎带机构的一端相连,所述穿扎带机构的另一端通过扎带拉紧机构与扎带切断机构相连”,以及专利号为cn202022544627.7的专利所述“所述机体的一端设有通过方型胶管用气体吹送扎带的气体送料管道,所述机体的另一端设有自动扎带机构,所述自动扎带机构包括开关组件、电机组件、齿轮组件、定位组件、感应组件、切割组件以及废料排出组件,所述开关组件与电机组件对应设置,并驱动电机组件工作,所述电机组件与齿轮组件对应设置,并驱动齿轮组件带动扎带收紧,所述定位组件也齿轮组件对应设置,并驱动扎带完成自动捆扎物品的动作,所述切割组件与齿轮组件对应设置,用于切割扎带捆扎后的尾料,所述废料排除组件与切割组件对应设置,用于将切割后的废料排出,所述感应组件用于感应电机组件、齿轮组件以及切割组件的动作是否完成”。
5.现有的手持式全自动扎带机存在结构过于复杂的问题,其捆扎和切割的过程不够连贯,导致其使用过程中动作不够流畅,在批量化的流水线作业过程中影响工作效率。
技术实现要素:
6.本实用新型为克服上述情况不足,旨在提供一种能解决上述问题的技术方案。
7.为实现上述目的,本实用新型提供如下技术方案:
8.一种手持式全自动扎带机,包括机体,机体上设有自动扎带机构,自动扎带机构与机体之间设有用以吹送扎带的气体送料管道;
9.自动扎带机构包括自动扎带本体,自动扎带本体上设有输送管、用以完成自动捆扎物品动作的定位组件、电机组件、控制电机组件启停以及定位组件动作的开关组件、用以带紧扎带的齿轮组件、用以感应动作的感应组件、用以切割扎带捆扎后的尾料的切割组件以及用以将切割后的废料排出的废料排出组件;
10.气体送料管道与输送管连通,输送管的侧面上设有穿出孔,定位组件设于输送管的端部并与穿出孔对应设置,切割组件设于输送管上方靠近穿出孔的部位,齿轮组件设于切割组件的上端,废料排出组件设于齿轮组件的上方;
11.电机组件包括与齿轮组件传动连接的第一电机以及与切割组件连接的第二电机,感应组件包括与第一电机电连接的第一感应组件以及与第二电机电连接的第二感应组件,第一感应组件与穿出孔对应设置,第二感应组件与开关组件对应设置。
12.作为本实用新型进一步方案:定位组件包括转动设于自动扎带本体上的定位爪一与定位爪二,定位爪一与开关组件转动连接,定位爪二与切割组件转动连接,定位爪一与定位爪二对应围合成一环形,定位爪一与定位爪二的内侧面分别设有第一导向槽和第二导向槽,第一导向槽与输送管连通,第一导向槽与输送管的连接处设有用以定位扎带头部的限位部,限位部与穿出孔的下端开口对应设置,在开关组件的动作下扎带尾部沿第二导向槽前进,穿入穿出孔内,扎带完成自动捆扎动作。
13.作为本实用新型进一步方案:第一电机的工作端设有电机齿轮,齿轮组件包括用以对扎带进行收紧的收紧齿轮以及设于电机齿轮和收紧齿轮之间用以传动的传动齿轮,电机齿轮与传动齿轮齿合传动,收紧齿轮包括通过转动轴设于自动扎带本体上的齿轮一和齿轮二,电机齿轮驱动传动齿轮旋转,传动齿轮驱动齿轮一旋转,齿轮一驱动齿轮二转动,在齿轮一和齿轮二上分别设有轴线重合且固定连接的第一棘轮和第二棘轮,第一棘轮和第二棘轮之间设有相互抵接配合的收紧位,收紧位设于穿出孔的上端开口处,第一棘轮和第二棘轮配合带动扎带收紧。
14.作为本实用新型进一步方案:第二电机包括直线电机,切割组件包括在自动扎带本体上滑动配合的切割块,切割块与第二电机的工作端固定连接,定位爪二转动连接于切割块上。
15.作为本实用新型进一步方案:废料排除组件包括设于第一棘轮和第二棘轮的上方的排出块,排出块上设有排出孔,排出孔的下端开口处与第一棘轮和第二棘轮之间的收紧位对应,用于将切割后的废料排出。
16.作为本实用新型进一步方案:第一感应组件和第二感应组件分别包括设于穿出孔内的第一红外感应器和设于第一感应块上方的第二红外感应器。
17.作为本实用新型进一步方案:第一感应组件和第二感应组件分别包括设于穿出孔内的第一红外感应器和设于第一感应块上方的第二红外感应器。
18.作为本实用新型进一步方案:机体上还设有送料机构,送料机构包括用于放置散乱扎带的圆形振动盘和用于接收排好的扎带的推料装置;推料装置上设有用于感应是否有料的有料感应器;扎带依次通过圆形振动盘的振动后振落到推料装置上,推料装置上的扎带通过封闭吹气装置吹入气体送料管道。
19.与现有技术相比,本实用新型的有益效果如下:本实用新型手持式全自动扎带机,其结构相对于现有技术中的扎带机更加的简便,减轻操作人员的手部负担的同时,使其更加耐用,通过控制开关动作,使扎带尾部的捆扎和切割的动作依次流畅完成,本实用新型手持式全自动扎带机使用更加简便,工作效率更高,适合批量化的流水线作业。
附图说明
20.图1是本实用新型的结构立体图;
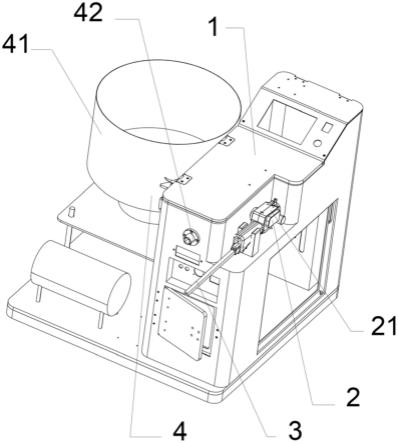
21.图2是本实用新型的内部俯视图;
22.图3是本实用新型中自动扎带机构的结构立体图;
23.图4是本实用新型中自动扎带机构的内部结构立体图;
24.图5是本实用新型中自动扎带机构的又一内部结构立体图;
25.图6是本实用新型中自动扎带机构的内部结构的正视图;
26.图7是本实用新型中自动扎带机构的内部结构的俯视图;
27.图8是本实用新型中开关组件、定位组件以及输送管的结构立体图;
28.图中的附图标记及名称如下:
29.机体-1,自动扎带机构-2,气体送料管道-3,自动扎带本体-21,输送管-22、定位组件-23、电机组件-24、开关组件-25、齿轮组件-26、感应组件-27、切割组件-28,废料排出组件-29,穿出孔-221,第一电机-241,第二电机-242,第一感应组件-271,第二感应组件-272,定位爪一-231,定位爪二-232,电机齿轮-261,传动齿轮-262,收紧齿轮-263,齿轮一-264,齿轮二-265,第一棘轮-266,第二棘轮-267,收紧位-268,切割块-281,排出块-291,排出孔-292,开关曲柄-251,传动杆-252,第一感应块-253,送料机构-4,圆形振动盘-41,推料装置-42,有料感应器-43。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.请参阅图1-8,一种手持式全自动扎带机,包括机体1,机体1上设有自动扎带机构2,自动扎带机构2与机体1之间设有用以吹送扎带的气体送料管道3,
32.自动扎带机构2包括自动扎带本体21,自动扎带本体21上设有输送管22、用以完成自动捆扎物品动作的定位组件23、电机组件24、控制电机组件24启停以及定位组件23动作的开关组件25、用以带紧扎带的齿轮组件26、用以感应动作的感应组件27、用以切割扎带捆扎后的尾料的切割组件28以及用以将切割后的废料排出的废料排出组件29;
33.气体送料管道3与输送管22连通,输送管22的侧面上设有穿出孔221,定位组件23设于输送管22的端部并与穿出孔221对应设置,切割组件28设于输送管22上方靠近穿出孔221的部位,齿轮组件26设于切割组件28的上端,废料排出组件29设于齿轮组件26的上方;
34.电机组件24包括与齿轮组件26传动连接的第一电机241以及与切割组件 28连接的第二电机242,感应组件27包括与第一电机241电连接的第一感应组件271以及与第二电机242电连接的第二感应组件272,第一感应组件271与穿出孔221对应设置,第二感应组件272与开关组件25对应设置;
35.在使用过程中,将待捆扎物体放置在定位组件23的工作范围内,通过气体送料管道3用气体吹送的方式,把扎带送到输送管22内,扎带从输送管22传送至定位组件23位置,通过开关组件25带动定位组件23动作,同时第二感应组件272感应到开关的动作后,第二感
应组件272控制第二电机242启动使切割组件28由复位状态向工作状态运动,扎带的尾部经过定位组件23的定位作用后,穿过穿出孔221,完成待捆扎物体的初步捆扎;
36.同时第一感应组件271感应到扎带尾部经过穿出孔221内的动作后,第一感应组件271控制第一电机241启动,第一电机241带动齿轮组件26的运动,在齿轮组件26的作用下扎带被收紧,当扎带收紧到一定程度时,扎带尾部穿过穿出孔221的动作趋于静止,第一感应组件271感应到扎带尾部的静止状态后,第一感应组件271控制第一电机241停止工作;
37.当齿轮组件26将扎带收紧后,松开开关组件25,使第二感应组件272感应到开关组件25的动作,第二感应组件272再次控制第二电机242启动,第二电机242带动切割组件28动作,切割组件28将扎带尾部多余部分进行切断,切割组件28切割完成后,处于复位状态,切断的废料,经过废料排出组件29 排出,从而完成捆扎,此时开关组件25和切割组件28均处于复位状态,完成一次捆扎动作,便于下一次捆扎动作的进行;
38.本实用新型手持式全自动扎带机,其结构相对于现有技术中的扎带机更加的简便,减轻操作人员的手部负担的同时,使其更加耐用,通过控制开关动作,使扎带尾部的捆扎和切割的动作依次流畅完成,本实用新型手持式全自动扎带机使用更加简便,工作效率更高,适合批量化的流水线作业。
39.本实用新型实施例中,定位组件23包括转动设于自动扎带本体21上的定位爪一231与定位爪二232,定位爪一231与开关组件25转动连接,定位爪二 232与切割组件28转动连接,定位爪一231与定位爪二232对应围合成一环形,定位爪一231与定位爪二232的内侧面分别设有第一导向槽和第二导向槽,第一导向槽与输送管22连通,第一导向槽与输送管22的连接处设有用以定位扎带头部的限位部,限位部与穿出孔221的下端开口对应设置,在开关组件25 的动作下扎带尾部沿第二导向槽前进,穿入穿出孔221内,扎带完成自动捆扎动作;
40.扎带通过气体送料管道3吹送到输送管22后,扎带通过输送管22道进入到第二导向槽,扎带头部卡位在限位部,扎带在向第二导向槽内滑动的过程中,按压开关组件25,第二感应组件272感应到开关的动作后,第二感应组件272 控制第二电机242启动使切割组件28由复位状态向工作状态运动,切割组件 28的运动带动定位爪二232向定位爪一231配合运动,扎带的尾部经过第二导向槽向第一导向槽滑动,同时按压开关组件25的动作,带动定位爪一231向定位爪二232运动,通过定位爪一231和定位爪二232的配合运动,使扎带尾部经过第二导向槽和第一导向槽向穿出孔221穿入,限位部与穿出孔221的下端开口对应设置使扎带的尾部穿入到扎带的头部,是扎带完成初步的捆扎动作。
41.本实用新型实施例中,第一电机241的工作端设有电机齿轮261,齿轮组件26包括用以对扎带进行收紧的收紧齿轮263以及设于电机齿轮261和收紧齿轮263之间用以传动的传动齿轮262,电机齿轮261与传动齿轮262齿合传动,收紧齿轮263包括通过转动轴设于自动扎带本体21上的齿轮一264和齿轮二 265,电机齿轮261驱动传动齿轮262旋转,传动齿轮262驱动齿轮一264旋转,齿轮一264驱动齿轮二265转动,齿轮一264和齿轮二265上分别设有轴线重合且固定连接的第一棘轮266和第二棘轮267,第一棘轮266和第二棘轮267 之间设有相互抵接配合的收紧位268,收紧位268设于穿出孔221的上端开口处,第一棘轮266和第二棘轮267配合带动扎带收紧;
42.扎带尾部穿出于穿出孔221后,第一感应组件271感应到扎带的动作后,第一感应
组件271控制第一电机241启动,第一电机241的依次带动电机齿轮 261、传动齿轮262和第一齿轮的齿合转动,第一棘轮266与齿轮一264的轴线重合且二者固定连接,第二棘轮267与齿轮二265的轴线重合且二者固定连接,齿轮一264带动第一棘轮266的转动,第一棘轮266的转动带动第二棘轮267 的从动,此时扎带的尾部穿入到收紧位268后,在第一棘轮266和第二棘轮267 的配合转动下,扎带尾部被收紧;
43.在一种实施例中,第一棘轮266和第二棘轮267采用弹性橡胶件制作,有利于扎带尾部的收紧;
44.在一种实施例中,第一电机241包括伺服马达。
45.本实用新型实施例中,第二电机242包括直线电机,切割组件28包括在自动扎带本体21上滑动配合的切割块281,切割块281与第二电机242的工作端固定连接,定位爪二232转动连接于切割块281上;
46.扎带从输送管22传送至定位爪二232的位置,通过开关组件25带动定位爪一231动作,同时第二感应组件272感应到开关的动作后,第二感应组件272 控制第二电机242启动使切割块281由复位状态向工作状态运动,切割组件28 的复位状态即切割块281位于定位孔处的上端开口处的状态,切割组件28的工作状态即切割块281向定位爪二232的方向运动的状态,切割块281的运动带动定位爪二232向定位爪一231配合运动。
47.本实用新型实施例中,废料排除组件包括设于第一棘轮266和第二棘轮267 的上方的排出块291,排出块291上设有排出孔292,排出孔292的下端开口处与第一棘轮266和第二棘轮267之间的收紧位268对应,用于将切割后的废料排出;
48.便于废料的收集,在一种实施例中,排出孔292的上端开口处连通有吸尘管,用于废料的自动收集。
49.本实用新型实施例中,开关组件25包括开关曲柄251以及与开关曲柄251 转动连接的传动杆252,传动杆252与定位爪一231转动连接,开关曲柄251 上固设有第一感应块253,第一感应块253与第一感应组件271对应设置;
50.通过按压开关曲柄251带动传动杆252转动,通过传动杆252的转动带动定位爪一231的运动,使定位爪一231向定位爪二232配合运动;
51.通过第一感应块253与第一感应组件271的配合,使第一电机241的启停能准确控制。
52.本实用新型实施例中,第一感应组件271和第二感应组件272分别包括设于穿出孔221内的第一红外感应器和设于第一感应块253上方的第二红外感应器;
53.通过第一红外感应器和第二红外感应器检测开关组件25以及扎带的动作状态,从而准确的进行第一电机241和第二电机242的启停控制。
54.本实用新型实施例中,机体1上还设有送料机构4,送料机构4包括用于放置散乱扎带的圆形振动盘41和用于接收排好的扎带的推料装置42;推料装置42上设有用于感应是否有料的有料感应器43;扎带依次通过圆形振动盘41 的振动后振落到推料装置42上,推料装置42上的扎带通过封闭吹气装置吹入气体送料管道3;
55.通过送料机构4使扎带快捷的被送入到气体送料管道3内,通过吹气装置使扎带被吹送到输送管22内。
56.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而
且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。