1.本实用新型涉及机器人自动化凸焊技术领域,具体为机器人自动化凸焊工作站。
背景技术:
2.凸焊主要用于焊接低碳钢和低合金钢的冲压件,凸焊的种类很多,除板件凸焊外,还有螺帽、螺钉类零件的凸焊,汽车的车身生产中,凸焊零件占比数量多,随着科技的飞速发展,凸焊工作站已经能够采用机器人进行自动化的焊接。
3.目前的机器人凸焊工作站生产产品较为单一,难以兼容多种产品,而且当零件更换时,原工作站改造内容多,改造成本多和改造周期长。
技术实现要素:
4.本实用新型的目的在于提供机器人自动化凸焊工作站,以解决上述背景技术中提出机器人凸焊工作站生产产品较为单一,难以兼容多种产品,而且当零件更换时,原工作站改造内容多,改造成本多和改造周期长的问题。
5.为实现上述目的,本实用新型提供如下技术方案:机器人自动化凸焊工作站,包括公用底座,所述公用底座顶端的一侧设置有凸焊机,所述凸焊机一侧的外壁上设置有凸焊螺母上料机构,所述凸焊螺母上料机构远离凸焊机一侧的公用底座顶端设置有下料皮带输送机构,所述下料皮带输送机构一端的公用底座顶部设置有机器人及其抓手机构,所述机器人及其抓手机构远离凸焊机一侧的公用底座顶端设置有零件上料机构,所述凸焊机一端的公用底座顶部设置有电气控制系统。
6.优选的,所述公用底座顶端的边缘位置处设置有安全围栏,通过将安全围栏设置于公用底座顶端的边缘位置处,以达到安全防护的目的。
7.优选的,所述零件上料机构设置为定位托盘与输送台,所述定位托盘与输送台采用销孔位精密配合,通过将零件上料机构设置于公用底座的顶端,以便对零件进行安置处理。
8.优选的,所述机器人及其抓手机构前端的零件抓取组件与机器人及其抓手机构末端的机器人组件之间呈可拆卸式精定位结构,通过机器人及其抓手机构的零件抓取组件机器人组件之间设置呈可拆卸式精定位结构,以便根据零件的规格对机器人及其抓手机构的零件抓取组件进行拆卸更换处理。
9.优选的,所述下料皮带输送机构设置为自动链板式输送机,通过下料皮带输送机构设置呈自动链板式输送机,以便对零件进行稳定输送处理。
10.与现有技术相比,本实用新型的有益效果是:该机器人自动化凸焊工作站零件上料机构的零件上料盘和机器人抓手均为标准可拆卸替换单元,提高机器人凸焊工作站的兼容性,当更换零件时,方便改造,且具备改造内容少、改造周期多、改造成本低的优异特性;
11.(1)通过将一定数量的零件平铺在零件上料机构的定位托盘上,定位托盘与输送台采用销孔位精密配合,当零件不同时,托盘整体切换,零件上料机构的双层自动输送台往
复运动,从而达到了自动上料的目的;
12.(2)通过机器人及其抓手机构的零件抓取组件与机器人末端组件之间采用可拆卸式精定位结构,当零件不同时,抓手组件能够进行快速的切换;
13.(3)通过带有零件的托盘随输送台输送到位后,机器人及其抓手机构的机器人末端组件携带抓取组件抓取零件,并将零件放置在凸焊机的下电极,凸焊螺母上料机构将下料皮带输送机构排列好的螺栓推送至下电极上,凸焊机的上电极下压,开始焊接,焊接完成后,机器人及其抓手机构将凸焊完的零件放置到下料皮带输送机构上,整个焊接完成,开始下一个抓取零件的循环。
附图说明
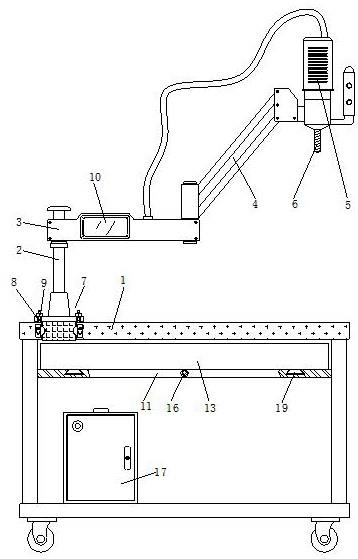
14.图1为本实用新型三维结构示意图;
15.图2为本实用新型图1中a处放大结构示意图;
16.图3为本实用新型图1中b处放大结构示意图;
17.图4为本实用新型机器人及其抓手机构三维放大结构示意图。
18.图中:1、公用底座;2、零件上料机构;3、机器人及其抓手机构;4、凸焊机;5、凸焊螺母上料机构;6、下料皮带输送机构;7、安全围栏;8、电气控制系统。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1-4,本实用新型提供的一种实施例:机器人自动化凸焊工作站,包括公用底座1,公用底座1顶端的边缘位置处设置有安全围栏7;
21.使用时,通过将安全围栏7设置于公用底座1顶端的边缘位置处,以达到安全防护的目的;
22.公用底座1顶端的一侧设置有凸焊机4,凸焊机4一侧的外壁上设置有凸焊螺母上料机构5,凸焊螺母上料机构5远离凸焊机4一侧的公用底座1顶端设置有下料皮带输送机构6,下料皮带输送机构6设置为自动链板式输送机;
23.使用时,通过下料皮带输送机构6设置呈自动链板式输送机,以便对零件进行稳定输送处理;
24.下料皮带输送机构6一端的公用底座1顶部设置有机器人及其抓手机构3,机器人及其抓手机构3前端的零件抓取组件与机器人及其抓手机构3末端的机器人组件之间呈可拆卸式精定位结构;
25.使用时,通过机器人及其抓手机构3的零件抓取组件机器人组件之间设置呈可拆卸式精定位结构,以便根据零件的规格对机器人及其抓手机构3的零件抓取组件进行拆卸更换处理;
26.机器人及其抓手机构3远离凸焊机4一侧的公用底座1顶端设置有零件上料机构2,零件上料机构2设置为定位托盘与输送台,定位托盘与输送台采用销孔位精密配合;
27.使用时,通过将零件上料机构2设置于公用底座1的顶端,以便对零件进行安置处
理;
28.凸焊机4一端的公用底座1顶部设置有电气控制系统8;
29.零件上料机构2、机器人及其抓手机构3、凸焊机4、凸焊螺母上料机构5、下料皮带输送机构6、安全围栏7与电气控制系统8皆设置于公用底座1的顶端。
30.本申请实施例在使用时,首先通过人工在零件上料机构2上摆满零件,上料托盘滑倒机器人抓件位置,机器人及其抓手机构3从零件上料机构2上抓取零件,移动到凸焊机4的下电极上,凸焊螺母上料机构5将凸焊螺母输送至零件的凸焊位置,此时凸焊机4的上电极开始下压,凸焊螺母凸焊完成,机器人及其抓手机构3将凸焊完成之后的零件放置到下料皮带输送机构6,依次循环,直至零件上料机构2的单层零件被抓空,人工开始再摆放零件,继而循环作业,之后通过将一定数量的零件平铺在零件上料机构2的定位托盘上,定位托盘与输送台采用销孔位精密配合,当零件不同时,托盘整体切换,零件上料机构2的双层自动输送台往复运动,即可达到上料的目的,最后通过机器人及其抓手机构3的零件抓取组件与机器人末端组件之间采用可拆卸式精定位结构,使得当零件不同时,抓手组件能够快速的进行切换,从而完成该机器人自动化凸焊工作站的使用。
技术特征:
1.机器人自动化凸焊工作站,其特征在于,包括公用底座(1),所述公用底座(1)顶端的一侧设置有凸焊机(4),所述凸焊机(4)一侧的外壁上设置有凸焊螺母上料机构(5),所述凸焊螺母上料机构(5)远离凸焊机(4)一侧的公用底座(1)顶端设置有下料皮带输送机构(6),所述下料皮带输送机构(6)一端的公用底座(1)顶部设置有机器人及其抓手机构(3),所述机器人及其抓手机构(3)远离凸焊机(4)一侧的公用底座(1)顶端设置有零件上料机构(2),所述凸焊机(4)一端的公用底座(1)顶部设置有电气控制系统(8)。2.根据权利要求1所述的机器人自动化凸焊工作站,其特征在于:所述公用底座(1)顶端的边缘位置处设置有安全围栏(7)。3.根据权利要求1所述的机器人自动化凸焊工作站,其特征在于:所述零件上料机构(2)设置为定位托盘与输送台,所述定位托盘与输送台采用销孔位精密配合。4.根据权利要求1所述的机器人自动化凸焊工作站,其特征在于:所述机器人及其抓手机构(3)前端的零件抓取组件与机器人及其抓手机构(3)末端的机器人组件之间呈可拆卸式精定位结构。5.根据权利要求1所述的机器人自动化凸焊工作站,其特征在于:所述下料皮带输送机构(6)设置为自动链板式输送机。
技术总结
本实用新型公开了机器人自动化凸焊工作站,包括公用底座,公用底座顶端的一侧设置有凸焊机,凸焊机一侧的外壁上设置有凸焊螺母上料机构,凸焊螺母上料机构远离凸焊机一侧的公用底座顶端设置有下料皮带输送机构,下料皮带输送机构一端的公用底座顶部设置有机器人及其抓手机构,机器人及其抓手机构远离凸焊机一侧的公用底座顶端设置有零件上料机构,凸焊机一端的公用底座顶部设置有电气控制系统。本实用新型机器人自动化凸焊工作站的零件上料机构的零件上料盘和机器人抓手均为标准可拆卸替换单元,提高机器人凸焊工作站的兼容性,当更换零件时,方便改造,且具备改造内容少、改造周期多、改造成本低的优异特性。改造成本低的优异特性。改造成本低的优异特性。
技术研发人员:马少臣 关亮 麻炜杰 张天瑞
受保护的技术使用者:上海简一自动化有限公司
技术研发日:2022.10.25
技术公布日:2023/2/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。