1.本发明属于柔性材料领域,涉及一种具有电/磁双重刺激响应的凝胶及其制备方法。
背景技术:
2.随着科技的进步,机器人逐渐由传统工业领域进入到人类日常生活中,与人类的交互接触大幅增加。然而,传统机器人几乎均由刚性材料构成,与人类组织的弹性模量差异很大,所以刚性机器人应用于人类日常生活中时,会存在很大的安全问题。其次,传统刚性机器人由于其自身主要由离散的连杆和机械关节组成,使其本身很难在非结构化环境中稳定操作。基于以上问题,软机器人应运而生。软机器人有着和人体组织相似的弹性模量,在人机交互时,相对于传统刚性机器人而言,具有更高的安全性。于此同时,由于其自身构成材料的柔软性和超高活动自由度,使得软机器人在设计构成时,不需要过于复杂的连结机构设计,这使得其在各种各样非结构化环境中能够更加灵活稳定地处理各类不太复杂的操作。
3.水凝胶是一类由亲水性聚合物链通过物理或化学作用连接构成的三维网络结构,它在水中溶胀而不溶解。由于水凝胶自身独有的高吸水、高保水、生物相容性好、响应速度快、一定强度的力学性能、质地柔韧等特性,其能够适用于软机器人的各个组件构成,如致动器、传感器、水凝胶基交互、水凝胶基软能源及软计算电路中。相较于传统水凝胶,智能型水凝胶能将温度、电场、磁场、光、酸碱度、酶等刺激转化为机械响应,使得其在软材料领域具有更为广阔的前景。目前,智能水凝胶在驱动器、人工肌肉、医药传输等场景已得到了初步的研究与应用,在软机器人领域也有了一些尝试,如机器人抓手、机器小鱼、仿生花朵、做仰卧起坐的小人等([1]jiang s,liu f,lerch a,et al:unusual and superfast temperature-triggered actuators.adv mater.[2]kim dy,choi s,cho h,et al:electroactive soft photonic devices for the synesthetic perception of color and sound.adv mater.[3].qin m,sun m,bai r,et al:bioinspired hydrogel interferometer for adaptive coloration and chemical sensing.adv mater.[4]ren j,zhang y,bai w,et al:elastic and wearable wire-shaped lithium-ion battery with high electrochemical performance.angew chem int ed engl.[5].lee h-r,woo j,han sh,et al:a stretchable ionic diode from copolyelectrolyte hydrogels with methacrylatedpolysaccharides.advanced functional materials.)。随着研究的深入,人们发现,相较于单一刺激响应水凝胶,双重甚至多重刺激响应水凝胶更能适应在不同环境的工作,其功能也从相对单一走向多样化,研究和发展具有快速响应及多重响应功能的杂交型智能水凝胶已然成为这一领域的前沿。
技术实现要素:
[0004]
本发明的目的是提供一种具有电/磁双重刺激响应的凝胶及其制备方法。该凝胶
可通过电场刺激及磁场刺激实现快速非接触式远程控制,可作为优异的软机器人材料使用。
[0005]
实现本发明目的的技术方案如下:
[0006]
具有电/磁双重刺激响应的凝胶的制备方法,由壳聚糖、羧甲基壳聚糖、氨基化四氧化三铁、聚乙烯醇及交联剂戊二醛交联聚合得到,具体步骤如下:
[0007]
步骤1,氨基化sio2包裹的fe3o4改性粒子(fe3o4@sio
2-nh2)的制备:将fe3o4@sio2超声分散在无水乙醇中,然后加入3-氨丙基三乙氧基硅烷(kh550),升温至90
±
5℃,搅拌回流12小时以上,依次用乙醇和水反复冲洗,干燥得到fe3o4@sio
2-nh2;
[0008]
步骤2,将壳聚糖溶液和羧甲基壳聚糖溶液混合均匀,加入戊二醛溶液交联2
±
0.5h,再加入聚乙烯醇(pva)溶液和fe3o4@sio
2-nh2,搅拌至混合均匀,倒入模具,反复冻融成型,制得fe3o4@sio
2-nh2复合凝胶。
[0009]
优选地,步骤1中,fe3o4@sio2的质量与kh550的体积比为1:1.1,g:ml。
[0010]
优选地,步骤2中,壳聚糖溶液为壳聚糖溶于乙酸溶液形成的溶液,壳聚糖的浓度为0.04g/ml,乙酸溶液的浓度为0.02ml/ml,羧甲基壳聚糖溶液的浓度为0.02g/ml,戊二醛溶液的浓度为0.056g/ml,聚乙烯醇溶液的浓度为0.08g/ml,壳聚糖、羧甲基壳聚糖、戊二醛、聚乙烯醇的质量比为120:40:1:160。
[0011]
优选地,步骤2中,反复冻融操作次数为3次以上;反复冻融过程中,冰冻温度为-20℃,冰冻时间为24h,解冻温度为26℃,解冻时间为4h。
[0012]
进一步地,本发明还提供上述fe3o4@sio
2-nh2复合凝胶在软机器人中的应用。
[0013]
与现有技术相比,本发明具有以下优点:
[0014]
本发明制得的凝胶体系中,壳聚糖与羧甲基壳聚糖均含有可电离阳离子基团氨基,使得凝胶处在直流电场中时,能够在酸性及中性环境中产生向正电极的偏转。同时,由于羧甲基壳聚糖含有可电离阴离子基团,使得凝胶能够在碱性环境下,对直流电场刺激产生向负电极的偏转。而且,由于凝胶体系中含有fe3o4磁性粒子,使得凝胶能够在具有电场刺激响应的同时,拥有良好的磁场刺激响应。本发明采用化学交联及物理交联的方法制备凝胶材料。该凝胶具有广泛的酸碱环境适应能力,低电压下的快速偏转,远程磁场控制及良好的可逆性和重现性,是一种绿色环保、制备简单、响应灵敏的软机器人基体材料。
附图说明
[0015]
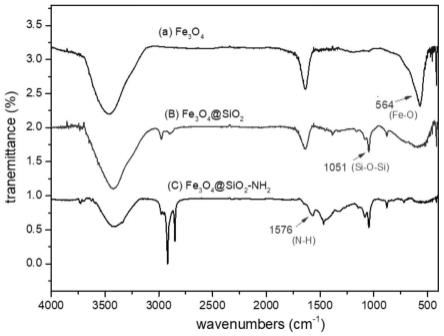
图1为fe3o4、fe3o4@sio2及fe3o4@sio
2-nh2的红外图。
[0016]
图2为不同复合凝胶在不同ph下的电响应测试结果图。
[0017]
图3为不同复合凝胶在不同致动电压下的电响应曲线。
[0018]
图4为不同复合凝胶在循环电压下电响应测试结果图。
[0019]
图5为不同复合凝胶的应力-应变曲线及韧性图。
[0020]
图6为不同复合凝胶模型及扭曲变形试验结果图。
[0021]
图7为(a)fe3o4@sio
2-nh2复合凝胶制成的磁控仿生花,(b)分部磁控体操小人,(c)磁控下的寻物搬运图。
具体实施方式
[0022]
下面结合具体实施例和附图对本发明作进一步详述。
[0023]
实施例1
[0024]
(1)法制备二氧化硅包裹的fe3o4改性粒子:室温条件下,往250ml烧瓶中依次加入76g乙醇、0.024gfe3o4和24g去离子水,利用机械搅拌,先升温到50℃,稳定15min后,加入2.35g氢氧化铵(氨水),继续搅拌10min,分四批次加入总量400ul的正硅酸乙酯(teos),每次100ul,每两次加入间隔时间20min。机械搅拌24小时,取出样品,用乙醇和去离子水各反复冲洗3次,产物在60℃下真空干燥,研磨后得到较纯净的fe3o4@sio2复合纳米粒子。
[0025]
(2)取1g已干燥的fe3o4@sio2复合微球,加入500ml三口圆底烧瓶中,再加入300ml无水乙醇,超声分散0.5h;按m
fe3o4@sio2
:v
kh550
=1:1.1,加入kh550溶液,升温至90℃,搅拌回流12小时,用乙醇和去离子水各反复冲洗,干燥后得到fe3o4@sio
2-nh2。
[0026]
图1为fe3o4、fe3o4@sio2、fe3o4@sio
2-nh2的红外扫描图,从图中可以看到,在564cm-1
处,出现了fe-o特征峰;在1051cm-1
出现了si-o-si的伸缩振动峰,表明fe3o4表面成功结合了sio2,即fe3o4@sio2制备成功;在1576cm-1
处,出现了氨基特征峰,表明磁粒子表面氨基化改性成功,即fe3o4@sio
2-nh2制备成功。
[0027]
实施例2
[0028]
在250ml烧瓶中加入19.5ml浓度为0.04g/ml的壳聚糖溶液和12.5ml浓度为0.02g/ml的羧甲基壳聚糖溶液,水浴加热至50℃,机械搅拌均匀至澄清透明,加入2.5ml浓度为0.005g/ml的戊二醛溶液,交联2h,随后加入12.5ml浓度为0.08g/ml的聚乙烯醇,同时,不加入磁性粒子及分别加入2gfe3o4、2gfe3o4@sio和2gfe3o4@sio
2-nh2,继续搅拌至混合均匀,倒入模具,反复冻融成型,即制得基本凝胶、fe3o4复合凝胶、fe3o4@sio2复合凝胶及fe3o4@sio
2-nh2复合凝胶。
[0029]
如图2所示,不同复合凝胶体系在不同ph下的电响应行为结果如下:
[0030]
(1)未改性fe3o4磁粒子的加入,使得凝胶电响应能力和响应稳定性大幅下降。在ph=3、6、7的酸性及中性电介质环境中的最大电响应偏转角,分别下降54.3%、33.3%、33.3%,平均下降40.8%;在ph=7、9、11的电介质环境下,凝胶无法稳定在最大偏转角,出现回转现象;仅在ph=13的强碱性环境下出现较好的电响应偏转。
[0031]
(2)将fe3o4@sio2复合凝胶与fe3o4复合凝胶对比,我们发现,fe3o4经改性后再加入体系,能够大幅改善fe3o4粒子对电响应基本体系的电响应能力的负面影响,并进一步增强凝胶在酸性及中性环境下的电响应能力,并使其在ph=7、9、11的电介质环境中具有更稳定的电响应偏转。如图所示,对比fe3o4@sio2复合体系与fe3o4复合凝胶体系,在ph=3时,复合体系最大电响应偏转角由55
°
提高到130
°
,提高136.3%;在ph=6时,复合体系最大电响应偏转角由60
°
提高到120
°
,提高100%;在ph=7时,复合体系最大电响应偏转角由20
°
提高到88
°
,提高340%;在酸性环境下,最大偏转角平均提高192.1%。且从图中可以看到fe3o4复合凝胶体系出现不稳定偏转的酸碱区间为ph=7到ph=11,共5个ph跨度,而fe3o4@sio2复合体系的不稳定区间则只可能出现在ph=9到ph=11之间的很小范围。
[0032]
(3)将fe3o4@sio
2-nh2复合体系与fe3o4复合凝胶体系对比,我们发现,fe3o4@sio
2-nh2改性粒子的加入,能够改善fe3o4粒子对电响应基本体系的电响应能力的负影响。如图所
示,fe3o4@sio
2-nh2复合体系相较于fe3o4复合凝胶体系,在ph=3时,电响应最大偏转角由55
°
提高到90
°
,提高63.6%;在ph=6时,电响应最大偏转角由60
°
提高到90
°
,提高66.7%;在ph=7时,电响应最大偏转角由20
°
提高到80
°
,提高300%;在酸性环境下,最大偏转角平均提高143.2%。对比fe3o4复合凝胶体系从ph=7到ph=11,共5个ph跨度的不稳定区间,fe3o4@sio
2-nh2复合体系的不稳定范围内则只可能出现在ph=9到ph=11之间的很小范围内。
[0033]
(4)对比fe3o4@sio2复合体系与fe3o4@sio
2-nh2复合体系,我们发现,在酸性、中性及弱碱性环境下,fe3o4@sio2复合体系有更大的电响应偏转角。而在碱性较强的环境下,则fe3o4@sio
2-nh2复合体系有更大的电响应偏转角。但相较于未改性fe3o4,两者都能更好的避免磁性粒子的加入对原本凝胶体系电响应性能的负面影响。
[0034]
对比三种粒子在不同ph环境下的电响应行为,得到以下结论:首先,改性磁粒子fe3o4@sio2、fe3o4@sio
2-nh2能够避免fe3o4粒子的引入而造成的在酸环境下凝胶的电响应最大偏转角大幅下降的问题;其次,相较于f复合凝胶体系,fe3o4@sio2复合凝胶体系与fe3o4@sio
2-nh2复合凝胶体系拥有更为稳定的偏转取向,不会出现大范围的不稳定电响应行为。
[0035]
本发明制得的凝胶为低电压响应凝胶,为保证凝胶在与人交互时的安全性,需要保证凝胶在36v人体安全电压内,具有良好的电响应能力。如图3所示,测试了1v、10v、20v、30v时,不同凝胶体系的电响应行为,以验证其在不同电压阶段的电场刺激响应能力(电介质溶液为0.01mol/l的nacl溶液)。如图3所示,添加未改性粒子fe3o4后,相对于原基本体系,凝胶在各个致动电压下,最大偏转角均大幅下降;改性磁粒子fe3o4@sio2、fe3o4@sio
2-nh2的加入不仅避免了磁性粒子的加入使凝胶最大偏转角下降,而且能够进一步提高凝胶在各个致动电压下的电响应能力。
[0036]
将凝胶条置于0.01mol/l的nacl溶液中,首先对其施加25v的正向电压,使其从原位置偏转0
°
至90
°
(或60
°
,因fe3o4复合体系在中性电介质溶液中最大偏转角仅为60
°
),再施加-25v反向电压,使其从原位偏转角90
°
(或60
°
)回复到0
°
,记此为一个电压偏转周期,记录凝胶条完成一个偏转周期所用时间。
[0037]
如图4所示,对四种体系分别进行了15个电压周期循环的抗疲劳测试。如图所示,经15个电压循环后,基本体系、fe3o4复合体系与fe3o4@sio
2-nh2复合体系依旧能够达到预定偏转角并完成周期循环,电响应能力未出现明显下降。然而,fe3o4@sio2复合体系在第十二个电响应循环时,已无法再回复到原位
°
,并最终在第十三个电压循环周期时彻底失去电响应能力。由此可知,fe3o4@sio2的加入使得凝胶的抗疲劳性显著降低。
[0038]
为了探究不同磁性粒子的加入对凝胶力学性能的影响,对其进行了拉伸测试。从图5(a)中可以看出,未改性磁粒子fe3o4加入凝胶体系后,尽管伸长率没有提高,但拉伸强度有了一定的提升,凝胶的拉伸强度从46.7kpa提升到60.3kpa,提升了29.1%;进一步的,改性磁粒子fe3o4@sio2的加入不仅使得凝胶的拉伸强度得以提升,从46.7kpa提升到55.6kpa,提升了19.1%,而且使得断裂伸长率也得以提高,从255%提升到271.7%,提升了6.5%。同样的,改性磁粒子fe3o4@sio
2-nh2的加入使得凝胶的断裂伸长率和断裂强度均得以提高,拉伸强度从46.7kpa提升到57.4kpa,提升了22.9%,拉伸长度从255%提升到了284.1%,提升了11.4%。同时,对加入不同磁性粒子后的凝胶的韧性进行了研究,如图5(b)所示,磁性粒子的加入均能提高凝胶的韧性,其中fe3o4、fe3o4@sio2、fe3o4@sio
2-nh2分别使凝胶的韧性提
高49.4%、69.3%及83.8%。因此,磁性功能粒子的加入不仅赋予凝胶磁响应的功能性,也能对凝胶的韧性增强起促进作用。综合考虑,fe3o4@sio
2-nh2的加入,对水凝胶的力学性能增强效果最好。
[0039]
软机器人特定功能的实现,很大程度上有赖于其功能化造型的成型。优异的成型性是赋予凝胶材料更多功能化结构的基础,没有好的成型性,再优越的响应性能都无法的到充分发挥,甚至使其性能毫无可用之地。因此,作为软机器人构筑基质的凝胶材料,必须要具备良好的成型性。如图6(a)所示,通过模具,fe3o4@sio
2-nh2复合凝胶材料被制备成了各类不同形状、不同尺寸的结构模型,如平展的花朵、覆盖鳞片的鱼尾、可爱的贝壳,舒展的海星、凹凸螺旋的海螺以及超级迷你的婆婆纳小花。如图6(b)所示,fe3o4@sio
2-nh2复合凝胶材料不仅仅有优异的成型性,更有着良好的扭曲变形能力,以适用各种应用环境。
[0040]
为验证凝胶在实际应用中的可行性,对浇铸成型的凝胶进行了一系列的应用实验。图7(a)为浇铸成型的凝胶小花,在磁力控制下慢慢绽放的仿生模拟,磁力越大,花瓣闭合越紧,当磁铁逐渐远离时,磁力越小,对凝胶花的牵引力也越来越小,便慢慢绽放。图7(b)为磁力控制下做体操的海星,在不同区域施加磁力,就会得到海星不同部位的响应,而这为未来凝胶精确磁控制的实现提供了现实支撑。相对于图7(a)、(b)的简易控制,图7(c)给出了更为复杂的凝胶行为控制,在磁力牵引下,软凝胶机器夹手完成了寻物、夹持、运物、置物及任务返程等一系列操作。此系列任务的进行依赖于对磁力的预先控制,精确的磁力控制带来了精确的凝胶动作,而这也为编程化的磁控软机器人发展做出了初步尝试。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。