1.本发明涉及将升降、第一回转、伸缩、第二回转的各模块组合而成的多轴致动器。
背景技术:
2.以往,在制造机动车、电机产品的制造工厂中,作业者对进行加工等的半自动机等设备进行工件的投入、取出作业。另外,已知有代替作业者进行这样的工件的投入、取出等的各种方式的作业机器人。
3.例如,专利文献1所记载的自动化机器人具备从基台到手腕依次组装的机器人动作的机构组合体以及以拆装自如地安装于机构组合体的外周面的方式预先分离组装的线缆组合体。
4.根据这样的自动化机器人,通过使线缆组合体相对于机器人动作的机构组合体完全分离,例如能够在定期保养时通过在机器人使用现场将线缆组合体取下、并利用螺纹紧固等将新的线缆组合体代替性地安装于机构组合体这样的简单的作业而完成保养对策,大幅有助于效率提高,另外机器人的作业停止时间也能够节省为最小限度。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开昭60-172482号公报
技术实现要素:
8.发明要解决的课题
9.然而,在机动车、电气设备的生产工厂中,一人的作业者对多个设备进行工件的投入、取出作业,进行这样的作业的空间大多为作业者能够通行的程度的较窄的通路,因此若欲使用上述那样的自动化机器人使作业自动化,则存在难以确保设置空间而难以自动化这样的问题。
10.另外,在机器人的外周安装线缆的结构中,伴随着自动化机器人的伸缩、旋转以及升降动作,该线缆被弯曲,因此需要确保考虑了该线缆的可动范围的设置空间。
11.并且,在自动化机器人进行旋转动作时,安装于外部的线缆阻碍机器人主体的旋转动作,从而当缩短线缆类的长度时,存在难以确保较大的回转角度这样的问题。
12.本发明是为了解决上述课题而完成的,目的在于提供如下的多轴模块致动器,该多轴模块致动器为在用作自动化机器人的多轴模块致动器的外部安装有线缆类的多轴模块致动器,该多轴模块致动器能够减小线缆类的可动范围,并且能够增大多轴模块致动器的回转角度。
13.用于解决课题的方案
14.解决上述课题的本发明的多轴模块致动器具备:升降部,其具有能够沿铅垂方向升降的升降轴;伸缩部,其具有能够沿水平方向伸缩的伸缩轴;第一回转部,其具有将所述伸缩部安装为能够相对于所述升降部回转的回转轴;以及第二回转部,其安装于所述伸缩
部,所述伸缩部与所述第二回转部或所述升降部通过柔性线缆而连接,其中,所述柔性线缆与在所述伸缩部或所述升降部设置的台阶部连接。
15.发明效果
16.根据本发明的多轴模块致动器,柔性线缆与在伸缩部或升降部设置的台阶部连接,因此在进行伸缩部的伸缩动作、升降部的升降动作以及第一回转部的旋转动作时,使柔性线缆的弯曲动作极小化,从而能够使柔性线缆的可动范围极小化,在第一回转部回转了的情况下,柔性线缆沿着升降部的外周卷绕,从而能够确保较大的回转角度。
附图说明
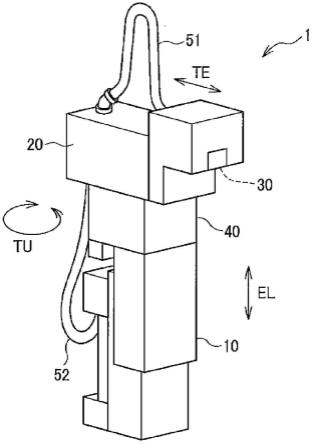
17.图1是本发明的实施方式的多轴模块致动器的立体图。
18.图2是示出本发明的实施方式的多轴模块致动器的伸缩部以及升降部的动作的立体图。
19.图3是本发明的实施方式的多轴模块致动器的伸缩部的分解图。
20.图4是示出本发明的实施方式的多轴模块致动器的伸缩部的前端部分的图。
21.图5是示出本发明的实施方式的多轴模块致动器的伸缩部的后端部分的图。
22.图6是示出本发明的实施方式的多轴模块致动器的前端修正部的立体图。
23.图7是本发明的实施方式的多轴模块致动器的侧视图。
24.图8是示出本发明的实施方式的多轴模块致动器的回转状态的立体图。
25.图9是示出本发明的实施方式的多轴模块致动器的使用状态的图。
具体实施方式
26.以下,参照附图对本发明的多轴模块致动器的实施方式进行说明。需要说明的是,以下的实施方式并不限定于各技术方案的发明,另外,实施方式中说明的特征的组合不一定全部是发明的解决方案所必需的。
27.图1是本发明的实施方式的多轴模块致动器的立体图,图2是示出本发明的实施方式的多轴模块致动器的伸缩部以及升降部的动作的立体图,图3是本发明的实施方式的多轴模块致动器的伸缩部的分解图,图4是示出本发明的实施方式的多轴模块致动器的伸缩部的前端部分的图,图5是示出本发明的实施方式的多轴模块致动器的伸缩部的后端部分的图,图6是示出本发明的实施方式的多轴模块致动器的前端修正部的立体图,图7是本发明的实施方式的多轴模块致动器的侧视图,图8是示出本发明的实施方式的多轴模块致动器的回转状态的立体图,图9是示出本发明的实施方式的多轴模块致动器的使用状态的图。
28.如图1所示那样,本实施方式的多轴模块致动器1具备:升降部10,其具有能够沿铅垂方向升降的升降轴el;伸缩部20,其具有能够沿水平方向伸缩的伸缩轴te;前端修正部(第二回转部)30,其安装于伸缩部20的前端;以及回转部(第一回转部)40,其具有将伸缩部20安装为能够相对于升降部10回转的回转轴tu。本实施方式的多轴模块致动器在前端修正部30安装有未图示的把持爪、吸附部,能够将工件把持、吸附而运输。在此,回转部40进行大幅的回转而将工件向未加工工件台、机床以及已加工工件台运输。另外,前端修正部30为了可靠地保持工件,以使工件与把持爪、吸附部的朝向一致的方式使把持爪、吸附部微小地旋转而进行位置调整。
29.本实施方式的多轴模块致动器1具备第一柔性线缆51以及第二柔性线缆52,第一柔性线缆51以及第二柔性线缆52由插通有为了驱动升降部10、伸缩部20、前端修正部30以及回转部40而从外部传输所要求的电力、压缩空气等的动力、信号的配电线缆、空气管以及信号线缆等的柔性配电管构成。需要说明的是,第一柔性线缆51以及第二柔性线缆52由能够容易地弯曲的合成树脂制的管体构成。另外,第一柔性线缆51以及第二柔性线缆52的外周根据需要而形成为蛇腹形状。
30.第一柔性线缆51与伸缩部20的前端以及后端的上表面分别连接,且第一柔性线缆51与在伸缩部20的前端设置的前端修正部30连接。另外,第二柔性线缆52与伸缩部20的后端的下表面以及升降部10连接。
31.如图2所示那样,升降部10具备:升降基部13,其安装于未图示的基台、地面;以及升降部主体12,其能够沿着升降轴el相对于升降基部13升降。另外,升降部10形成有沿与升降轴el交叉的方向(水平方向)突出的第二台阶部11,在第二台阶部11的下表面安装有第二柔性线缆52。需要说明的是,在升降部主体12的上端安装有回转部40。
32.升降部10内置有未图示的滚珠丝杠装置和使丝杠轴旋转的未图示的驱动马达,该滚珠丝杠装置具有被保持为能够旋转的丝杠轴以及螺合于该丝杠轴的螺母构件,通过利用驱动马达而旋转的丝杠轴的旋转动作,使螺合于丝杠轴的螺母构件沿着丝杠轴移动,通过该螺母构件的升降动作而进行升降部主体12的升降动作。另外,升降部10具备沿着升降轴el延伸的直线引导装置,通过该直线引导装置而引导由上述的滚珠丝杠装置进行的升降动作。
33.伸缩部20具备伸缩部主体22以及能够沿着伸缩轴te伸缩的伸缩部前端部23。在伸缩部前端部23的前端安装有沿与伸缩轴te交叉的方向(铅垂方向)突出的第一台阶部21,在第一台阶部21的侧面安装有第一柔性线缆51的一端。
34.另外,在伸缩部主体22的与伸缩部前端部23相反端侧的后方部的上表面安装有第一柔性线缆51的另一端,在下表面安装有第二柔性线缆52的另一端。需要说明的是,第一柔性线缆51经由第一台阶部21而与设置于伸缩部前端部23的前端修正部30连接。
35.伸缩部20具有内置于伸缩部主体22的未图示的驱动马达以及传递该驱动马达的旋转力的未图示的传动带,具有沿着该传动带移动的移动块以及沿伸缩轴te方向引导该移动块的轨道构件的未图示的运动引导装置安装于伸缩部前端部23。这样利用传动带将驱动马达的旋转力变换为直线运动,移动块沿着传动带在伸缩轴te方向上移动,从而将伸缩部前端部23组装为能够沿着伸缩轴te伸缩。
36.如图3所示那样,形成于伸缩部前端部23的第一台阶部21由罩构件25形成,罩构件25包括一对侧罩25a、25b以及前端罩25c。侧罩25a、25b以及前端罩25c分别由合成树脂构成。另外,一对侧罩25a、25b以从伸缩部20的侧方将第一柔性线缆51夹入的方式组装。另外,前端罩25c从一对侧罩25a、25b的前端侧安装。
37.通过这样由多个分割体构成罩构件25,安装于伸缩部前端部23的部件、零件的装卸变得容易,此外能够容易地进行第一柔性线缆51损伤了的情况下的更换作业。
38.如图4所示那样,罩构件25构成形成有向下方开口的前端修正部安装口31的大致伞结构,通过该伞结构而防止作业环境内的异物、水分侵入前端修正部30等。通过该伞结构而使前端修正部30自身无需具有防水性能,能够实现前端修正部30的小型化。
39.如图4以及图5所示那样,伸缩部20在罩构件25的前端侧以及伸缩部主体22的后端具备由金属板把手等构成的搬运部26,能够使用该搬运部26容易地进行伸缩部20自身的运输、相对于多轴模块致动器1的装卸。
40.如图6所示那样,前端修正部30是安装于伸缩部前端部23的内部的构件,且具备能够沿着修正轴co旋转的转台32以及使该转台32旋转的驱动马达33。另外,在转台32安装有未图示的把持爪、吸附部,构成为能够根据所处理的工件的姿态、朝向等使把持爪、吸附部的朝向沿着修正轴co旋转从而可靠地保持工件。
41.如图1以及图2所示那样,回转部40夹设于升降部10与伸缩部20之间,且将伸缩部20能够沿着回转轴tu回转地安装于升降部10。回转部40只要能够将伸缩部20安装为能够回转,则也可以采用任意的结构,但例如构成为具有驱动马达以及被旋转轴承保持为能够旋转的旋转台,且在该旋转台安装伸缩部20。另外,旋转台与驱动马达构成为由传动带等连结,将驱动马达的旋转力向旋转台传递。
42.接着,参照图7对本实施方式的多轴模块致动器1的第一柔性线缆51以及第二柔性线缆52的安装结构进行详细叙述。第一柔性线缆51的在伸缩部前端部23的第一台阶部21安装的一端形成为直线状的直线安装部54,第一柔性线缆51的在伸缩部主体22的上表面安装的另一端形成为倾斜大致45
°
的倾斜安装部53。这样,通过将一端侧相对于第一台阶部21大致正交地安装、并将另一端侧相对于伸缩部20朝向第一台阶部21倾斜地安装,在图7所示那样的伸缩部20收缩了的状态下,第一柔性线缆51通过使倾斜安装部53侧呈大致s状地弯曲,能够以使第一柔性线缆51不会由于伸缩部20的动作而从伸缩部20的后端面出来的方式弯曲。另外,在伸缩部20伸长了的状态下,如图2所示那样,由于直线安装部54安装于第一台阶部21,而能够将第一柔性线缆51的高度抑得较低。由此,能够将由于伸缩部20的伸缩动作引起的第一柔性线缆51的可动范围抑得较小,能够减小本实施方式的多轴模块致动器1的设置空间。
43.另外,第二柔性线缆52的两端形成为直线安装部54,一端侧安装于升降部10的第二台阶部11的下端面,另一端侧相对于伸缩部20大致垂直地安装于伸缩部20的后端下表面。另外,如图7所示那样,第二柔性线缆52的伸缩部20侧的安装部与第二台阶部11侧的安装部彼此在铅垂方向上不重叠。并且,在第二柔性线缆52的两端的安装部经由旋转连接器而进行安装。另外,第二柔性线缆52安装于第二台阶部11的下端面,从而安装于与回转部40的回转轴tu的轴心l分离的位置。
44.通过这样安装第二柔性线缆52,而以相对于第二台阶部11向下方垂下的方式安装第二柔性线缆52,因此如图1以及图2所示那样,第二柔性线缆52不会阻碍升降部10的升降动作,另外,也能够将第二柔性线缆52的可动范围抑制得较小。
45.另外,如图8所示那样,在通过回转部40的旋转动作而伸缩部20回转了的情况下,第二柔性线缆52在升降部10的外周卷绕,从而不会阻碍伸缩部20的旋转动作,能够增大伸缩部20的回转角度。另外,第二柔性线缆52经由旋转连接器而安装,因此防止由于由回转部40进行的旋转动作对安装部施加负载。
46.具体而言,优选使从回转部40的回转轴tu的轴心l到第二柔性线缆52的下方的安装位置的尺寸c最佳化。在此,当尺寸c较小时,在回转部40的回转时第二柔性线缆52与升降部10的侧壁接触,从而回转部40的回转角度变小,当尺寸c较大时,由于第二柔性线缆52的
弯曲而对上下的直线安装部54施加的弯曲力矩增大,从而有可能阻碍第二柔性线缆52的顺畅的回转。
47.于是,在第二柔性线缆52的两端形成的直线安装部54的位置中的、安装于伸缩部20的上方侧以从轴心l到第二柔性线缆52的与伸缩部20的安装位置的尺寸a比从轴心l到回转部40的端部43的尺寸b大的方式配置,以避开回转部40的回转轴tu的轴心l。
48.另外,为了在第二柔性线缆52回转了时减小施加于第二柔性线缆52的弯曲力矩,下方侧的直线安装部54的安装位置以从上方侧的直线安装部54以及下方侧的直线安装部54到轴心l的尺寸c成为a>c的方式配置。并且,为了尽量接近轴心l,第二柔性线缆52的下方的直线安装部54的安装位置以比从轴心l到升降部10的侧壁14的尺寸d大的方式配置。
49.即,为了满足上述的条件,以尺寸a~d成为a>c>d且a>b的方式配置。
50.这样构成的本实施方式的多轴模块致动器1如图9所示那样,设置于作为已有设备的机床60的附近,且能够使如下工序自动化:从载置有未加工的工件61的未加工工件台63把持未加工的工件61,将未加工的工件61从机床60的工件投入口62投入机床60,在机床60的加工完成后,把持加工后的工件61
′
而将其载置于已加工工件台64。
51.需要说明的是,本实施方式的多轴模块致动器1如上所述以使包括第一柔性线缆51以及第二柔性线缆52的可动范围在内的整体的可动范围变小的方式设定,因此即使在设置于已有设备的附近的情况下,也容易确保设置空间。另外,由于将进行伸缩和回转的伸缩部20与回转部40组合,因此所需的行程能够确保回转角度,并且确保换产调整等的作业空间。
52.另外,由于利用直线引导装置引导升降部10的升降动作、伸缩部20的伸缩动作,因此能够实现升降部10、伸缩部20等的可动部的轻量化,能够减轻驱动马达的负载并且处理重量大的工件,能够使以往作业员进行的使用已有设备的作业自动化。
53.需要说明的是,在上述的实施方式中,作为直线引导装置,对具有轨道构件以及能够相对于轨道构件移动的移动块的情况进行了说明,但直线引导装置例如也可以应用将花键轴应用于轴构件且具有能够沿着该花键轴移动的移动构件的滚珠花键。根据专利技术方案的记载可以明确,施加了那样的变更或改良的方式也能够包含于本发明的技术范围。
54.附图标记说明
55.1多轴模块致动器,10升降部,11第二台阶部,20伸缩部,21第一台阶部,30前端修正部(第二回转部),40回转部(第一回转部),51第一柔性线缆,52第二柔性线缆。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。