1.本发明涉及机器人技术领域,尤其涉及一种具有杂草识别功能的除草机器人。
背景技术:
2.农作物种植过程中,杂草是最严峻的问题之一,它是农作物强劲的竞争对手,给经济作物带来很大的危害和损失。杂草不仅与农作物争夺阳光、水分、肥料、还与作物争夺生存空间,如不经过及时的处理,将阻碍作物生长,以致作物产量的下降,妨碍农作物的收成,增加生产费用。
3.现阶段我国常见的除草方式有人工除草、机械除草、化学药剂除草、覆盖除草、生物防治和栽培管理等。人工除草缺点明显,耗费大量劳动力和时间,效率低下。机械除草相对人工除草,效率大幅度提升,但如果技术不够成熟、精确度不高易“误伤”农作物,此外除草的成本也相对较高。使用除草剂可以高效除草,但需要大量人工操作喷洒除草剂,并且除草剂的污染风险也较大,会对土地和环境的危害,以及可能会使农作物受到不良影响,随着食物链的层层积累,人体中也不免会有除草剂的药物残留,同时,反复使用相同除草剂的作用方式使杂草出现了严重抗性,会极大地降低除草剂的除草效率,因此,采用上述除草方式,很容易对农作物造成误伤,且除草效果差。
技术实现要素:
4.为了克服现有除草方式容易对农作物造成误伤,且除草效果差的问题,本发明提供了一种具有杂草识别功能的除草机器人。
5.为了解决上述技术问题,本发明提供了一种具有杂草识别功能的除草机器人,包括控制模块、行驶模块、机械手臂模块、杂草识别模块和终端模块,控制模块分别与行驶模块、机械手臂模块、杂草识别模块和终端模块连接;
6.终端模块,用于生成第一控制指令和第二控制指令,第一控制指令为除草机器人的规划路线指令,第二控制指令为除草机器人的杂草识别指令;
7.控制模块,用于接收第一控制指令和第二控制指令,以及将第一控制指令发送给行驶模块,将第二控制指令发送给杂草识别模块;
8.行驶模块,用于根据第一控制指令控制除草机器人在规划路线上行驶;
9.杂草识别模块,用于根据第二控制指令控制除草机器人对杂草图像进行识别,并将杂草图像对应的识别结果发送回控制模块;
10.控制模块,还用于接收识别结果,并将识别结果发送给终端模块;
11.终端模块,还用于根据识别结果生成第三控制指令,第三控制指令为除草机器人的执行动作指令;
12.控制模块,还用于接收第三控制指令,以及将第三控制指令发送给机械手臂模块;
13.机械手臂模块,用于根据第三控制指令控制除草机器人执行相应的除草动作。
14.本发明提供的一种具有杂草识别功能的除草机器人的有益效果是:工作时,行驶
模块根据第一控制指令控制在规划路线上行驶至目的地,然后杂草识别模块根据第二控制指令控制除草机器人识别处杂草,最后机械手臂模块根据第三控制指令除掉识别出来的杂草,避免对农作物造成损害,同时,通过物理方式除草,避免了杂草对除草剂产生耐药性,导致除草效果差。
15.在上述技术方案的基础上,本发明的一种具有杂草识别功能的除草机器人还可以做如下改进。
16.进一步,该除草机器人还包括:
17.主视觉模块和定位模块,控制模块分别与主视觉模块和定位模块连接;
18.主视觉模块,用于采集图像数据,并将图像数据发送给控制模块;
19.定位模块,用于采集除草机器人的实时坐标信息,并将实时坐标信息发送给控制模块;
20.控制模块,还用于接收图像数据和实时坐标信息,以及将图像数据和实时坐标信息发送给终端模块;
21.终端模块在生成第一控制指令时,具体用于:根据图像数据和实时坐标信息生成第一控制指令。
22.采用上述进一步方案的有益效果是:通过主视觉模块采集图像数据,通过定位模块采集实时坐标信息,根据图像数据和实时坐标信息生成第一控制指令,为除草机器人规划路线。
23.进一步,上述主视觉模块为kinect2 tof深度相机系统。
24.采用上述进一步方案的有益效果是:通过kinect2 tof深度相机系统能够实现高精准的采集图像数据。
25.进一步,上述定位模块为北斗厘米级定位rtk-gps系统。
26.采用上述进一步方案的有益效果是:通过定位模块为北斗厘米级定位rtk-gps系统能够实时定位除草机器人,并获取除草机器人的实时坐标信息。
27.进一步,上述行驶模块包括车体、驱动电机、车轮、转向电机、十字轴万向节、转向推杆、左转向节、右转向节和转向连杆;
28.驱动电机与转向电机分别与控制系统连接;
29.车轮分别与车体、驱动电机、左转向节和右转向节连接;
30.转向电机连接在车体上,十字轴万向节的一端与转向电机连接,十字轴万向节的另一端与转向推杆连接;
31.十字轴万向节用于将转向电机生成的转向力传递至转向推杆,转向推杆用于根据转向力做直线往复运动;
32.转向推杆与转向连杆连接,转向连杆分别与左转向节和右转向节连接;
33.左转向节用于根据直线往复运动为车轮提供向左的转向力,左转向节用于根据直线往复运动为车轮提供向右的转向力。
34.采用上述进一步方案的有益效果是:驱动电机驱动车轮转动从而控制除草机器人前进,转向电机将转向力通过十字轴万向节传递给转向推杆,迫使转向推杆进行直线往复运动,而左转向节将直线往复运动转换为左转向力从而迫使除草机器人向左转向,右转向节将直线往复运动转换为右转向力从而迫使除草机器人向右转向,从而控制除草机器人的
前进方向。
35.进一步,上述机械手臂模块包括主动臂、从动臂、连接杆、步进电机和激光器;
36.连接杆分别与主动臂和从动臂连接,主动臂通过连接杆带动从动臂转动,步进电机分别与主动臂和控制模块连接,激光器与从动臂连接;
37.机械手臂模块在根据第三控制指令控制除草机器人执行相应的除草动作时,具体用于:
38.根据第三控制指令控制步进电机驱动主动臂,以使主动臂带动从动臂转动,从动臂带动执行相应的除草动作,并带动激光器除掉杂草。
39.采用上述进一步方案的有益效果是:步进电机驱动主动臂转动,主动臂带动从动臂转动,从动臂进而将激光器对准杂草,并通过激光器除掉杂草。
40.进一步,上述杂草识别模块是基于cnn深度卷积神经网络训练得到的densenet模型。
41.采用上述进一步方案的有益效果是:通过densenet模型能够精准识别杂草,从而避免除草机器人误伤农作物。
42.进一步,该除草机器人还包括电源模块;
43.电源模块分别与控制模块、行驶模块、机械手臂模块、主视觉模块、定位模块和杂草识别模块连接;
44.电源模块,用于为控制模块、行驶模块、机械手臂模块、主视觉模块、定位模块和杂草识别模块提供电源。
45.采用上述进一步方案的有益效果是:通过电源模块,为除草机器人的各个模块供电。
附图说明
46.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面结合附图和实施例对本发明作进一步说明。
47.图1为本发明实施例的一种具有杂草识别功能的除草机器人的系统示意图;
48.图2为本发明实施例的一种具有杂草识别功能的除草机器人的正视图;
49.图3为本发明实施例的一种具有杂草识别功能的除草机器人的仰视图;
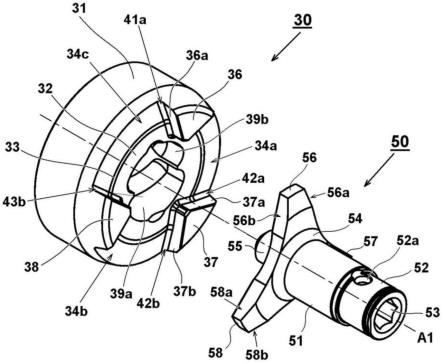
50.图4为本发明实施例的机械手臂模块的结构示意图。
51.附图标记:控制模块1、行驶模块2、机械手臂模块3、杂草识别模块4、终端模块5、主视觉模块6、定位模块7、车体8、驱动电机9、车轮10、前车轮10-1、后车轮10-2、转向电机11、十字轴万向节12、转向推杆13、左转向节14、右转向节15、转向连杆16、前车桥17、后车桥18、主动臂19、从动臂20、连接杆21、步进电机22、激光器23、静平台24、动平台25、深度相机26。
具体实施方式
52.下列实施例是对本发明的进一步解释和补充,对本发明不构成任何限制。
53.以下结合附图描述本发明实施例的一种具有杂草识别功能的除草机器人。
54.如图1所示,本发明实施例的一种具有杂草识别功能的除草机器人,包括控制模块1、行驶模块2、机械手臂模块3、杂草识别模块4和终端模块5,控制模块1分别与行驶模块2、
机械手臂模块3、杂草识别模块4和终端模块5连接;
55.终端模块5,用于生成第一控制指令和第二控制指令,第一控制指令为除草机器人的规划路线指令,第二控制指令为除草机器人的杂草识别指令;
56.控制模块1,用于接收第一控制指令和第二控制指令,以及将第一控制指令发送给行驶模块2,将第二控制指令发送给杂草识别模块4;
57.行驶模块2,用于根据第一控制指令控制除草机器人在规划路线上行驶;
58.杂草识别模块4,用于根据第二控制指令控制除草机器人对杂草图像进行识别,并将杂草图像对应的识别结果发送回控制模块1;
59.控制模块1,还用于接收识别结果,并将识别结果发送给终端模块5;
60.终端模块5,还用于根据识别结果生成第三控制指令,第三控制指令为除草机器人的执行动作指令;
61.控制模块1,还用于接收第三控制指令,以及将第三控制指令发送给机械手臂模块3;
62.机械手臂模块3,用于根据第三控制指令控制除草机器人执行相应的除草动作。
63.工作时,行驶模块2根据第一控制指令控制在规划路线上行驶至目的地,然后杂草识别模块4根据第二控制指令控制除草机器人识别处杂草,最后机械手臂模块3根据第三控制指令除掉识别出来的杂草。
64.可选的,终端模块5可以为用户使用的终端设备,比如,电脑,在终端模块5的显示界面上可显示有一个“控制标识”,用户触发该控制标识即可生成第一控制指令、第二控制指令或者第三控制指令,该控制标识可以是一个插件,可通过文字或形状等形式显示,在用户触发该控制标识后,将生成的第一控制指令、第二控制指令或者第三控制指令发送给控制系统。规划路线可以是预先存储在控制系统中的,规划路线可以是针对某个区域中道路进行规划的行驶路线,除草机器人按照此规划路线进行行驶,可以到达行驶至该区域的各个位置,以实现对有该区域中杂草的去除。
65.可选的,控制系统可采用型号为stm32f407的单片机控制板,此外,单片机控制板设置有输入输出接口板,用于外接各类设备。
66.可选的,该除草机器人还包括wifi通信模块,通过接口板与单片机控制板连接,用于控制系统与终端模块5的通信。
67.可选的,该除草机器人还包括:
68.主视觉模块6和定位模块7,控制模块1分别与主视觉模块6和定位模块7连接;
69.主视觉模块6,用于采集图像数据,并将图像数据发送给控制模块1;
70.定位模块7,用于采集除草机器人的实时坐标信息,并将实时坐标信息发送给控制模块1;
71.控制模块1,还用于接收图像数据和实时坐标信息,以及将图像数据和实时坐标信息发送给终端模块5;
72.终端模块5在生成第一控制指令时,具体用于:根据图像数据和实时坐标信息生成第一控制指令。
73.可选的,主视觉模块6可为kinect2 tof深度相机26系统,采用kinect2 tof深度相机26系统采集深度图像,利用深度图像来实现对于场景的精准的数字化,从而实现高精度
的识别、定位、重建,获取现实三维场景完整的几何信息,实时、动态绘制局部地图,因此,图像数据包含了三维场景完整的几何信息以及绘制的局部地图。
74.可选的,定位模块7可为北斗厘米级定位rtk-gps系统,北斗厘米级定位rtk-gps系统连接有多星多频gnss天线,而多星多频gnss天线放置在除草机器人上,采用rtk、imu等传感器融合定位,得出除草机器人的平面坐标x、y和海拔高度h等实时坐标信息,实时得到厘米级定位精度。
75.可选的,如图2-图3所示,行驶模块2包括车体8、驱动电机9、车轮10、转向电机11、十字轴万向节12、转向推杆13、左转向节14、右转向节15和转向连杆16;
76.驱动电机9与转向电机11分别与控制系统连接;
77.车轮10分别与车体8、驱动电机9、左转向节14和右转向节15连接;
78.转向电机11连接在车体8上,十字轴万向节12的一端与转向电机11连接,十字轴万向节12的另一端与转向推杆13连接;
79.十字轴万向节12用于将转向电机11生成的转向力传递至转向推杆13,转向推杆13用于根据转向力做直线往复运动;
80.转向推杆13与转向连杆16连接,转向连杆16分别与左转向节14和右转向节15连接;
81.左转向节14用于根据直线往复运动为车轮10提供向左的转向力,左转向节14用于根据直线往复运动为车轮10提供向右的转向力。
82.可选的,车轮10包括前车轮10-1和后车轮10-2,其中,前车轮10-1通过前车桥17支撑在车体8的前方,后车轮10-2通过后车桥18支撑在车体8的后方,另外,后车轮10-2作为驱动轮,由驱动电机9驱动,为除草机器人提供前进的动力,另外,转向电机11将转向力通过十字轴万向节12传递给转向推杆13,迫使转向推杆13进行直线往复运动,而左转向节14将直线往复运动转换为左转向力从而迫使除草机器人向左转向,右转向节15将直线往复运动转换为右转向力从而迫使除草机器人向右转向,从而控制除草机器人的前进方向。
83.可选的,驱动电机9根据第一控制程序控制除草机器人的前进,转向电机11根据第一控制程序提供转向力(向左的转向力或向右的转向力)从而控制除草机器人的前进方向。
84.可选的,如图4所示,机械手臂模块3包括主动臂19、从动臂20、连接杆21、步进电机22和激光器23;
85.连接杆21分别与主动臂19和从动臂20连接,主动臂19通过连接杆21带动从动臂20转动,步进电机22分别与主动臂19和控制模块1连接,激光器23与从动臂20连接;
86.机械手臂模块3在根据第三控制指令控制除草机器人执行相应的除草动作时,具体用于:
87.根据第三控制指令控制步进电机22驱动主动臂19,以使主动臂19带动从动臂20转动,从动臂20带动执行相应的除草动作,并带动激光器23除掉杂草。
88.可选的,机械手臂模块3安装在车体8的后方,车体8上设置有静平台24,静平台24用于放置步进电机22。
89.可选的,步进电机22为带刹车的闭环步进电机22,步进电机22上还安装有10弧分减速比5的行星齿轮减速机,将步进电机22的转速减速到主动臂19所需要的转速,步进电机22上还安装有绝对值编码器,使主动臂19和从动臂20开机后无需返回零点状态。
90.可选的,主动臂19设置有3个,三个主动臂19也同样安装在静平台24上,相应的,从动臂20也设置为3个,每个主动臂19连接一个从动臂20,主动臂19和从动臂20构成三条运动支链,由主动臂19带动从动臂20运动,从而改变各个运动支链的运动形态,同时,从动臂20上设置有动平台25,用于安装激光器23,运动支链改变运动形态,使得动平台25上的激光器23具有多个可操作性的自由度。
91.可选的,激光器23为脉冲光纤激光器23,激光器23由激光器23控制盒控制,激光器23控制盒与单片机控制板连接,由单片机控制板控制激光器23的打开/关闭,激光器23固定在动平台25上,跟随运动支链进行xyz轴三个空间自由度内运动。
92.可选的,步进电机22根据第三控制指令控制主动臂19转动,激光器23根据第三控制指令发射激光进行除草。
93.可选的,杂草识别模块4是基于cnn深度卷积神经网络训练得到的densenet模型,其具体可以是基于现有技术中的方法训练得到的,在此不在赘述,通过cnn深度卷积神经网络训练的模型进行杂草的识别,可以提高识别准确性。
94.可选的,densenet模型为根据现有的cnn深度卷积神经网络为基础的图像识别技术,通过在每个卷积层后引入高效通道注意力机制,增加重要特征的权重,强化杂草特征并抑制背景特征;其次,通过dropblock正则化随机隐藏杂草图像部分特征块,以提升densenet模型的泛化能力,增强模型识别不同类型杂草的适应性。
95.可选的,杂草识别模块4还包括深度相机26,用于获取杂草图像,并将杂草图像送入densenet模型进行杂草识别,深度相机26安装在车体8的下方,与地面成15度~30度倾角,可以避免深度相机26无法发现被农作物所遮挡的杂草。
96.可选的,深度相机26根据第二控制指令获取杂草图像,densenet模型根据第一控制指令对杂草图像进行识别。
97.可选的,还包括电源模块;
98.电源模块分别与控制模块1、行驶模块2、机械手臂模块3、主视觉模块6、定位模块7和杂草识别模块4连接;
99.电源模块,用于为控制模块1、行驶模块2、机械手臂模块3、主视觉模块6、定位模块7和杂草识别模块4提供电源。
100.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
101.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。