1.本发明属于外骨骼助力装置技术领域,特别涉及一种具有免荷功能的膝关节外骨骼助力装置及其助力方法。
背景技术:
2.随着外骨骼技术的不断创新,利用其可穿戴的特点减轻下肢关节的内力具有良好的前景。但在外骨骼设计过程中,最突出的问题之一是人体与外骨骼关节的旋转轴线对齐问题,而人机关节轴线对齐有利于减轻外骨骼对人体的负面影响。目前技术的解决方法主要有路径规划对齐、增加关节自由度形成冗余被动关节等,其中路径规划对齐的方式虽然可以拟合关节轴线运动曲线,但具有单一性,只能针对单一个体适用,换个对象体后需要重新进行设计,适用性较差,同时当穿戴的外骨骼位置发生偏移时,也会导致外骨骼运动轴线和人体运动轴线不重合,对人体关节造成损害。对于冗余被动关节虽能较好的自动对齐关节轴线,但其机械结构较复杂,使得机构变得笨重。外骨骼的续航能力和功率均会受到影响,而无源式外骨骼虽然避免了续航问题,但有限的承载能力使得减载效果不明显,也失去了针对不同人群对外骨骼的不同需求。
3.因此,本发明提出一种具有免荷功能的膝关节外骨骼助力装置及其助力方法,这对于减轻用户行走过程中膝关节的受力,实现免荷功能具有重要意义,同时可以避免在使用过程中因外骨骼装置的运动轴线与人体运动轴线不重合,进而对人体关节造成二次伤害。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种具有免荷功能的膝关节外骨骼助力装置及其助力方法,通过对气囊的充放气可以实现大腿绑缚组件以及小腿绑缚组件对大腿以及小腿紧松绑缚的切换,进而可以实现在使用者行走过程中与人体步态相配合的支撑随动状态与支撑工作状态之间的周期性转换,继而减轻使用者行走过程中膝关节所受的部分负荷,有利于降低关节磨损。
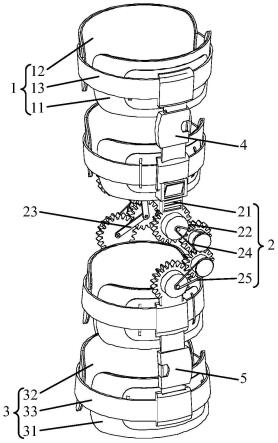
5.本发明采用的技术方案是一种具有免荷功能的膝关节外骨骼助力装置,其包括多个大腿绑缚组件、多个小腿绑缚组件以及设置于所述大腿绑缚组件和小腿绑缚组件之间的转动组件,所述多个大腿绑缚组件串联设置,且相邻两个大腿绑缚组件之间通过上连接件连接,每个大腿绑缚组件均包括大腿骨架、大腿内衬和大腿绑带,所述大腿骨架内侧设有所述大腿内衬,且所述大腿内衬上设有大腿部气囊,所述大腿骨架对称设于所述大腿绑带上,且所述大腿骨架的外侧与所述上连接件连接;所述转动组件对称设于所述大腿绑缚组件和小腿绑缚组件之间,且所述转动组件包括多级串联啮合齿轮组、自动补偿机构、多连杆机构、第一传动组件和第二传动组件,所述自动补偿机构设于所述多级串联啮合齿轮组与所述大腿骨架之间,且所述自动补偿机构包括固定卡盘以及转动设于所述固定卡盘上的活动卡扣,所述固定卡盘设于所述大腿骨架上,且所述多级串联啮合齿轮组中第一齿轮的第一
连接板通过所述活动卡扣固定于所述固定卡盘中,所述多连杆机构设于所述多级串联啮合齿轮组的一侧,且所述多级串联啮合齿轮组包括第一齿轮、第二齿轮、第三齿轮以及第四齿轮,所述第一齿轮、第二齿轮、第三齿轮以及第四齿轮依次齿轮啮合传动,且所述第一齿轮和第二齿轮之间通过所述第一传动组件传动连接,所述第三齿轮和第四齿轮之间通过所述第二传动组件传动连接,且所述第四齿轮中的第四连接板固定于所述小腿绑缚组件中的小腿骨架上;所述多个小腿绑缚组件串联设置,且相邻两个小腿绑缚组件之间通过下连接件连接,每个小腿绑缚组件均包括小腿骨架、小腿内衬和小腿绑带,所述小腿骨架内侧设有所述小腿内衬,且所述小腿内衬上设有小腿部气囊,所述小腿骨架对称设于所述小腿绑带上,且所述小腿骨架的外侧与所述下连接件连接。
6.进一步地,所述第一传动组件包括第一电机、第一连接皮带和第一从动带轮,所述第一电机设于所述第一齿轮上,且所述第一电机的输出轴轴线与所述第一齿轮的中心轴线重合,所述第一电机的输出轴上设有第一主动带轮,且所述第一从动带轮设于所述第二齿轮上,所述第二齿轮的中心轴线与所述第一从动带轮的中心轴线重合,且所述第一从动带轮与所述第一主动带轮通过所述第一连接皮带传动连接。
7.进一步地,所述第二传动组件包括第二电机、第二连接皮带和第二从动带轮,所述第二电机设于所述第四齿轮上,且所述第二电机的输出轴轴线与所述第四齿轮的中心轴线重合,所述第二电机的输出轴上设有第二主动带轮,且所述第二从动带轮设于所述第三齿轮上,所述第三齿轮的中心轴线与所述第二从动带轮的中心轴线重合,且所述第二从动带轮与所述第二主动带轮通过所述第二连接皮带传动连接。
8.进一步地,所述多连杆机构包括第一连杆、第二连杆和第三连杆,所述第一连杆的第一端与所述第一齿轮的中心处连接,且所述第一连杆的第二端与所述第二齿轮的中心处连接,所述第二连杆的第一端与所述第二齿轮的中心处连接,且所述第二连杆的第二端与第三齿轮的中心处连接,所述第三连杆的第一端与所述第三齿轮的中心处连接,且所述第三连杆的第二端与所述第四齿轮的中心处连接。
9.优选地,所述第一齿轮的中心轴线、第二齿轮的中心轴线、第三齿轮的中心轴线以及所述第四齿轮的中心轴线均平行,且所述第一齿轮中心轴线到所述第二齿轮中心轴线之间的垂直距离与所述第三齿轮中心轴线到所述第四齿轮中心轴线之间的垂直距离相等。
10.优选地,所述第一齿轮的圆周方向设有第一连接板,且所述第一连接板上均布设有卡槽,所述第一连接板设于所述固定卡盘中,且所述活动卡扣扣合于所述卡槽中,用于连接所述第一连接板和所述固定卡盘。
11.优选地,所述大腿内衬呈锥形结构状。
12.优选地,所述小腿内衬呈锥形结构状,且所述小腿内衬在人体胫骨结节处设置有凹槽。
13.本发明的第二方面,提供一种具有免荷功能的膝关节外骨骼助力装置的助力方法,其包括以下步骤:
14.s1、将外骨骼助力装置的大腿绑缚组件以及小腿绑缚组件分别固定在下肢的大腿以及小腿处;
15.s2、通过设于所述下肢足底的足底传感器检测所述足底的压力值,并判断所述下肢所处的步态周期;
16.s3、当所述足底压力值小于设定的足底压力阀值时,所述下肢处于步态摆动期,且外骨骼助力装置处于支撑随动状态,通过释放所述大腿部气囊以及小腿部气囊内的气体,能够实现所述大腿绑缚组件以及小腿绑缚组件对大腿以及小腿的松绑缚,同时所述第一电机以及第二电机均停止转动,此时外骨骼助力装置跟随所述下肢的运动而运动;
17.s4、当所述足底压力值大于设定的足底压力阀值时,所述下肢处于步态支撑期,且外骨骼助力装置处于支撑工作状态,通过向所述大腿部气囊以及小腿部气囊充气,能够实现所述大腿绑缚组件以及小腿绑缚组件对大腿以及小腿的紧绑缚,同时所述第一电机通过所述第一连接皮带带动所述第二齿轮转动,所述第二电机通过所述第二连接皮带带动所述第三齿轮转动,且所述第二齿轮与第三齿轮啮合传动,此时外骨骼助力装置对大腿以及小腿施加分离力,继而实现膝关节的免荷助力。
18.s5、外骨骼助力装置通过对所述大腿部气囊以及小腿部气囊的充放气,能够相应的完成随动状态以及工作状态的转换,继而能够实现所述下肢膝关节在行进过程中的免荷或者减荷助力。
19.本发明的特点和有益效果是:
20.1、本发明提供的一种具有免荷功能的膝关节外骨骼助力装置及其助力方法,通过对气囊的充放气可以实现大腿绑缚组件以及小腿绑缚组件对大腿以及小腿紧松绑缚的切换,进而可以实现在使用者行走过程中与人体步态相配合的支撑随动状态与支撑工作状态之间的周期性转换,继而减轻使用者行走过程中膝关节所受的部分负荷,有利于降低关节磨损。
21.2、本发明提供的一种具有免荷功能的膝关节外骨骼助力装置及其助力方法,在大腿绑缚组件以及小腿绑缚组件之间设置自动补偿机构,当大腿绑缚组件与小腿绑缚组件发生滑移时,大腿绑缚组件与小腿绑缚组件之间的距离变大,自动补偿机构能够补偿变大的距离,且能够使得外骨骼助力装置在支撑工作状态时仍然可以达到减负的作用。
22.3、本发明提供的一种具有免荷功能的膝关节外骨骼助力装置及其助力方法,通过将小腿绑缚组件在人体胫骨结节处设置凹槽,使处于支撑工作状态的外骨骼助力装置的小腿绑缚组件3对小腿有效地传递力,减小小腿绑缚组件对使用者小腿的压迫,并且可以防止辅具整体下滑这一现象。
23.4、本发明提供的一种具有免荷功能的膝关节外骨骼助力装置及其助力方法,通过将大腿绑缚组件的大腿内衬设置成锥形,使处于支撑工作状态的外骨骼助力装置的大腿绑缚组件对大腿有效地传递力,可以防止外骨骼助力装置在支撑工作状态大腿绑缚组件和使用者大腿产生相对滑动。
附图说明
24.图1是本发明具有免荷功能的膝关节外骨骼助力装置的整体结构示意图;
25.图2是本发明具有免荷功能的膝关节外骨骼助力装置的整体结构主视图;
26.图3是本发明具有免荷功能的膝关节外骨骼助力装置的整体结构左视图;
27.图4是本发明转动组件的左侧视图;
28.图5是本发明转动组件的右侧视图;
29.图6是本发明的弯曲结构示意图;
30.图7是本发明支撑随动状态示意图;
31.图8是本发明支撑工作状态示意图。
32.主要附图标记:
33.大腿绑缚组件1;大腿骨架11;大腿内衬12;大腿绑带13;转动组件2;多级串联啮合齿轮组21;第一齿轮211;第一连接板2111;第二齿轮212;第三齿轮213;第四齿轮214;第四连接板2141;自动补偿机构22;固定卡盘221;活动卡扣222;卡槽223;多连杆机构23;第一连杆231;第二连杆232;第三连杆233;第一传动组件24;第一电机241;第一连接皮带242;第一从动带轮243;第二传动组件25;第二电机251;第二连接皮带252;第二从动带轮253;小腿绑缚组件3;小腿骨架31;小腿内衬32;小腿绑带33;上连接件4;下连接件5。
具体实施方式
34.为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
35.本发明提供一种具有免荷功能的膝关节外骨骼助力装置,如图1~图3所示,其包括多个大腿绑缚组件1、多个小腿绑缚组件3以及设置于大腿绑缚组件1和小腿绑缚组件3之间的转动组件2,多个大腿绑缚组件1串联设置,且相邻两个大腿绑缚组件1之间通过上连接件4连接,每个大腿绑缚组件1均包括大腿骨架11、大腿内衬12和大腿绑带13,大腿骨架11内侧设有大腿内衬12,且大腿内衬12上设有大腿部气囊,大腿骨架11对称设于大腿绑带13上,且大腿骨架11的外侧与上连接件4连接,其中大腿内衬12呈锥形结构状,通过将大腿内衬12设置成锥形,使处于支撑工作状态的外骨骼助力装置的大腿绑缚组件1对大腿有效地传递力,可以防止外骨骼助力装置在支撑工作状态大腿绑缚组件1和使用者大腿产生相对滑动。
36.在一种优选方式中,大腿绑带13由弹性带和非弹性带组成,采用魔术贴可以将大腿绑带13横向粘贴在大腿骨架11上,且大腿绑带13的两端均连接到大腿骨架11上,大腿绑带13通过紧缠绕粘贴的方式使得大腿骨架11收缩,进而使大腿内衬12贴合大腿。
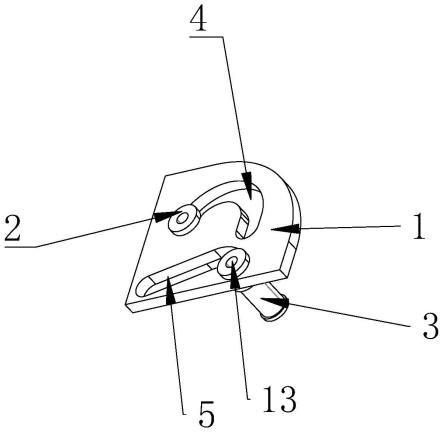
37.如图1~图3所示,转动组件2对称设于大腿绑缚组件1和小腿绑缚组件3之间,且转动组件2包括多级串联啮合齿轮组21、自动补偿机构22、多连杆机构23、第一传动组件24和第二传动组件25,自动补偿机构22设于多级串联啮合齿轮组21与大腿骨架11之间,且自动补偿机构22包括固定卡盘221以及转动设于固定卡盘221上的活动卡扣222,固定卡盘221设于大腿骨架11上,且多级串联啮合齿轮组21中第一齿轮211的第一连接板2111通过活动卡扣222固定于固定卡盘221中,多连杆机构23设于多级串联啮合齿轮组21的一侧,且多级串联啮合齿轮组21包括第一齿轮211、第二齿轮212、第三齿轮213以及第四齿轮214,第一齿轮211、第二齿轮212、第三齿轮213以及第四齿轮214依次齿轮啮合传动,且第一齿轮211和第二齿轮212之间通过第一传动组件24传动连接,第三齿轮213和第四齿轮214之间通过第二传动组件25传动连接,且第四齿轮214中的第四连接板2141固定于小腿绑缚组件3中的小腿骨架31上。
38.在一种优选方式中,第一齿轮211的圆周方向设有第一连接板2111,且第一连接板2111上均布设有卡槽223,卡槽223为斜直线型卡槽,第一连接板2111设于固定卡盘221中,且活动卡扣222扣合于卡槽223中用于连接第一连接板2111和固定卡盘221,且第一连接板2111在固定卡盘221内只可以单向滑动。当大腿绑缚组件1以及小腿绑缚组件3与大腿或小
腿发生相对滑动时,大腿骨架11与小腿骨架31之间的距离会变长,此时自动补偿机构22中的第一连接板2111与固定卡盘221会发生相对滑动,且固定卡盘221上的活动卡扣222转动,进入另一个第一连接板2111上的卡槽223中,由于第一连接板2111在固定卡盘221内只可以单向滑动,故自动补偿机构22的的长度在变长后不能减小,进而实现补偿的功能。
39.在一种优选方式中,第一齿轮211的中心轴线、第二齿轮212的中心轴线、第三齿轮213的中心轴线以及第四齿轮214的中心轴线均平行,且第一齿轮211中心轴线到第二齿轮212中心轴线之间的垂直距离与第三齿轮213中心轴线到第四齿轮214中心轴线之间的垂直距离相等。
40.如图1~图3所示,多个小腿绑缚组件3串联设置,且相邻两个小腿绑缚组件3之间通过下连接件5连接,每个小腿绑缚组件3均包括小腿骨架31、小腿内衬32和小腿绑带33,小腿骨架31内侧设有小腿内衬32,且小腿内衬32上设有小腿部气囊,小腿骨架31对称设于小腿绑带33上,且小腿骨架31的外侧与下连接件5连接,其中小腿内衬32呈锥形结构状,其符合人机工程学,可以较好地贴合人体小腿,同时小腿内衬32在人体胫骨结节处设置凹槽,通过将小腿内衬32在人体胫骨结节处设置凹槽,使处于支撑工作状态的外骨骼助力装置的小腿绑缚组件3对小腿有效地传递力,减小小腿绑缚组件3对使用者小腿的压迫,并且可以防止辅具整体下滑这一现象。
41.在一种优选方式中,小腿绑带33由弹性带和非弹性带组成,采用魔术贴可以将小腿绑带33横向粘贴在小腿骨架31上,且小腿绑带33的两端均连接到小腿骨架31上,小腿绑带33通过紧缠绕粘贴的方式使得小腿骨架31收缩,进而使小腿内衬32贴合小腿。
42.如图4所示,第一传动组件24包括第一电机241、第一连接皮带242和第一从动带轮243,第一电机241设于第一齿轮211上,且第一电机241的输出轴轴线与第一齿轮211的中心轴线重合,第一电机241的输出轴上设有第一主动带轮,且第一从动带轮243设于第二齿轮212上,第二齿轮212的中心轴线与第一从动带轮243的中心轴线重合,且第一从动带轮243与第一主动带轮通过第一连接皮带242传动连接。
43.如图4所示,第二传动组件25包括第二电机251、第二连接皮带252和第二从动带轮253,第二电机251设于第四齿轮214上,且第二电机251的输出轴轴线与第四齿轮214的中心轴线重合,第二电机251的输出轴上设有第二主动带轮,且第二从动带轮253设于第三齿轮213上,第三齿轮213的中心轴线与第二从动带轮253的中心轴线重合,且第二从动带轮253与第二主动带轮通过第二连接皮带252传动连接。
44.如图5所示,多连杆机构23包括第一连杆231、第二连杆232和第三连杆233,第一连杆231的第一端与第一齿轮211的中心处连接,且第一连杆231的第二端与第二齿轮212的中心处连接,第二连杆232的第一端与第二齿轮212的中心处连接,且第二连杆232的第二端与第三齿轮213的中心处连接,第三连杆233的第一端与第三齿轮213的中心处连接,且第三连杆233的第二端与第四齿轮214的中心处连接。
45.本发明的第二方面,提供一种具有免荷功能的膝关节外骨骼助力装置的助力方法,如图6~图8所示,其包括以下步骤:
46.s1、将外骨骼助力装置的大腿绑缚组件1以及小腿绑缚组件3分别固定在下肢的大腿以及小腿处;
47.s2、通过设于下肢足底的足底传感器检测足底的压力值,并判断下肢所处的步态
周期;
48.s3、当足底压力值小于设定的足底压力阀值时,下肢处于步态摆动期,且外骨骼助力装置处于支撑随动状态,通过释放大腿部气囊以及小腿部气囊内的气体,能够实现大腿绑缚组件1以及小腿绑缚组件3对大腿以及小腿的松绑缚,同时第一电机241以及第二电机251均停止转动,此时外骨骼助力装置跟随下肢的运动而运动;
49.s4、当足底压力值大于设定的足底压力阀值时,下肢处于步态支撑期,且外骨骼助力装置处于支撑工作状态,通过向大腿部气囊以及小腿部气囊充气,能够实现大腿绑缚组件1以及小腿绑缚组件3对大腿以及小腿的紧绑缚,同时第一电机241通过第一连接皮带242带动第二齿轮212转动,第二电机251通过第二连接皮带252带动第三齿轮213转动,且第二齿轮212与第三齿轮213啮合传动,此时外骨骼助力装置对大腿以及小腿施加分离力,继而实现膝关节的免荷助力。
50.s5、外骨骼助力装置通过对大腿部气囊以及小腿部气囊的充放气,能够相应的完成随动状态以及工作状态的转换,继而能够实现下肢膝关节在行进过程中的免荷助力。
51.本发明的具体操作步骤如下:
52.如图1~图8所示,本发明提供一种具有免荷功能的膝关节外骨骼助力装置及其助力方法,首先将外骨骼助力装置的大腿绑缚组件1以及小腿绑缚组件3分别固定在下肢的大腿以及小腿处,通过向大腿部气囊以及小腿部气囊内充气,可以实现大腿绑缚组件1以及小腿绑缚组件3对大腿以及小腿的紧绑缚,此时外骨骼助力装置处于支撑工作状态;通过释放大腿部气囊以及小腿部气囊内的气体,可以实现大腿绑缚组件1以及小腿绑缚组件3对大腿以及小腿的松绑缚,此时外骨骼助力装置处于支撑随动状态。通过对气囊的充放气实现紧松绑缚的切换。对于气囊充放气的控制采用设于下肢足底的足底压力传感器,通过检测足底压力情况,判断下肢是否处于步态支撑期即当检测到超过设定的足底压力阈值,此时膝关节处于支撑状态,外骨骼助力装置支撑工作状态,大腿部气囊以及小腿部气囊开始充气紧绑缚大腿和小腿,同时第一传动组件24和第二传动组件25驱动齿轮转动,对使用者大腿和小腿施加分离力,实现对膝关节免荷。同理,当检测到小于设定的足底压力阈值时,判断此时膝关节处于随动状态,大腿部气囊以及小腿部气囊开始放气,实现松绑缚大腿和小腿,第一传动组件24和第二传动组件25不工作,外骨骼助力装置随人体下肢的运动而运动。
53.在具体使用过程中,随着佩戴了本发明的外骨骼助力装置的使用者的下肢从屈曲状态到伸直状态时,外骨骼助力装置由支撑随动状态进入支撑工作状态,处于支撑工作状态的大腿绑缚组件1紧束缚大腿,小腿绑缚组件3紧束缚小腿,第一传动组件24和第二传动组件25驱动四个串联啮合转动齿轮进行转动,使大腿绑缚组件1和小腿绑缚组件3沿胫骨机械轴a2的方向产生背离的作用力,进而对佩戴了外骨骼助力装置的使用者的膝关节进行减负荷,如图7和图8所示。而随着佩戴了外骨骼助力装置的使用者的下肢从伸直状态到屈曲状态时,外骨骼助力装置由支撑工作状态进入支撑随动状态,处于支撑随动状态的大腿绑缚组件1松束缚大腿,小腿绑缚组件3松束缚小腿,第一传动组件24和第二传动组件25不再对四个串联啮合转动齿轮进行驱动,四个串联啮合转动齿轮随着使用者的下肢运动而运动,此时大腿绑缚组件1和小腿绑缚组件3沿胫骨机械轴a2的方向不会产生背离的作用力。其中需要注意的是,四个串联啮合转动齿轮具有三个自由度,可以适应人体膝关节转动中心的“j“型轨迹。随着外骨骼助力装置的使用者的运动,大腿绑缚组件1和小腿绑缚组件3会
与使用者大腿和小腿皮肤产生相对移动。当大腿绑缚组件1和小腿绑缚组件3沿胫骨机械轴a2的距离增大时,自动补偿机构22中的第一连接板2111与固定卡盘221会发生相对滑动,且固定卡盘221上的活动卡扣222转动,进入另一个第一连接板2111上的卡槽223中,使得大腿绑缚组件1和小腿绑缚组件3之间的支撑距离变大,实现滑移补偿,当膝关节外骨骼助力装置处于支撑工作状态时,依旧可以对使用者的膝关节进行减负荷。
54.由此可见,佩戴了本发明的外骨骼助力装置的使用者在步行时,由于其下肢发生的是从屈曲状态到伸直状态继而从伸直状态到屈曲状态的过程,本发明的外骨骼助力装置由使用者的下肢驱动,相应的从支撑随动状态到支撑工作状态继而从支撑工作状态到支撑随动状态,这是和使用者的步态配合的自动转换过程。在人体行走过程中,屈曲状态时腿处于悬空状态,膝关节不需要承受体重负荷。此时穿戴在使用者下肢的外骨骼助力装置处于支撑随动状态,在该状态下转动组件2具有三个自由度,满足使用者的膝关节在平面上转动的要求,使用者膝关节在此状态下不会因为膝关节外骨骼和膝关节的转动轴线不重合而造成损伤。大腿绑缚组件1和小腿绑缚组件3在此状态下均为松绑缚状态,该状态并不会影响使用者下肢血液流通。
55.在下肢处于伸直状态时,本发明的外骨骼助力装置处于支撑工作状态,通过第一传动组件24和第二传动组件25使其紧束缚的大腿绑缚组件1和小腿绑缚组件3分别对使用者大腿和小腿施加沿胫骨机械轴相背离的作用力,抵消部分人体膝关节承受的负荷。
56.本发明通过将小腿绑缚组件3在人体胫骨结节处设置凹槽,使处于支撑工作状态的外骨骼助力装置的小腿绑缚组件3对小腿有效地传递力,减小小腿绑缚组件3对使用者小腿的压迫,并且可以防止辅具整体下滑这一现象。本发明还通过将大腿绑缚组件1的大腿内衬12设置成锥形,使处于支撑工作状态的外骨骼助力装置的大腿绑缚组件1对大腿有效地传递力,可以防止外骨骼助力装置在支撑工作状态大腿绑缚组件1和使用者大腿产生相对滑动。
57.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。