1.本发明涉及焊枪技术领域,具体涉及一种手持式摆动焊枪。
背景技术:
2.目前,手工焊接工件时的质量完全取决于工人的技术熟练度,焊接过程中手臂需要保持长时间的稳定移动,对焊缝质量要求高的场合,需要工人的技术也越高;同时在焊接连续的焊缝时需要工人长时间保持一个固定姿势,肌肉紧张容易疲劳,劳动强度高,眼睛需要紧盯焊缝同时配合手臂移动,对眼睛伤害极大。
3.实际焊接中,经常会遇到焊接轨迹不规则或不连续的情况,此时就需要工人快速转换焊接位置,其会增大工人的焊接难度,要求工人具有丰富的工作经验(手工焊接针对不同的焊缝及焊接需求有多种运枪轨迹,需要工人熟练掌握各种运枪轨迹并稳定的运枪需要很高的技术能力)。现有技术中为了降低焊接难度,通常会使用焊接小车或者机器人替换手工焊接,但上述焊接工艺需要铺设小车轨道或相应的工装夹具对工件进行定位,费时费力,投入巨大,机器人体积较大,且只能专地专场使用。
4.针对上述技术问题,本发明提出了一种手持式摆动焊枪,通过焊枪本体的摆动和沿焊缝方向的移动合成焊接轨迹,人工仅控制焊缝方向的移动即可轻松焊接出高质量的焊缝;通过配备行走机构,对焊缝位置进行跟踪,降低焊接操作难度;当进一步采用自动行走机构时,人工仅需要保持焊枪稳定,焊枪本体摆动和自动行走即可自动配合实现焊缝的高质量焊接,从而能够极大的降低对工人的技能要求;使焊接质量和操作过程得到很好的平衡,特别适合小批量、需要快速变换位置、空间狭小不利于铺设设备轨道,同时又对焊接质量有很高要求的场合。
技术实现要素:
5.鉴于上述情况,本发明提供了一种手持式摆动焊枪,可保证焊接质量,降低操作难度。
6.为实现上述目的,本发明采取的技术方案是:
7.一种手持式摆动焊枪,包括焊枪本体、摆动器以及手柄,所述焊枪本体可摆动的安装于所述摆动器上,所述焊枪本体尾端外露于所述摆动器,所述摆动器与所述手柄一体或分体设置。
8.本发明一种手持式摆动焊枪进一步的改进在于,所述焊枪本体可旋转摆动的安装于所述摆动器上。
9.本发明一种手持式摆动焊枪更进一步的改进在于,所述摆动器包括第一壳体、第一安装座、第一驱动电机以及相互外啮合的驱动齿轮和从动齿轮,所述第一安装座固设于所述第一壳体内壁上,所述第一驱动电机安装于所述第一安装座上且其输出端同轴连接有所述驱动齿轮,所述从动齿轮同轴连接于所述焊枪本体,所述焊枪本体前端转动安装于所述第一安装座上。第一壳体外侧安装连接有手柄,第一壳体和第一安装座之间可以采用连
接件连接设置也可以采用一体(压铸)成型工艺制备而成。
10.本发明一种手持式摆动焊枪进一步的改进在于,所述焊枪本体可竖向和/或横向摆动的安装于所述摆动器上。
11.本发明一种手持式摆动焊枪更进一步的改进在于,所述摆动器包括第二壳体、第二安装座、第二驱动电机、第一偏心驱动轮、第一固定套,所述第二安装座固设于所述第二壳体内壁上,所述第二驱动电机安装于所述第二安装座上且其输出端同轴连接有所述第一偏心驱动轮,所述第一偏心驱动轮远离所述第二驱动电机的一端偏心设置有连杆,所述连杆转动连接于所述第一固定套,所述第一固定套套设于所述焊枪本体上,所述第二安装座上开设有供所述焊枪本体竖向滑移的第一滑移口。第二壳体和第二安装座之间可以采用连接件连接设置也可以采用一体(压铸)成型工艺制备而成。
12.本发明一种手持式摆动焊枪更进一步的改进在于,所述摆动器包括第三壳体、第三安装座、第三驱动电机、第二偏心驱动轮以及第二固定套,所述第三安装座固设于所述第三壳体内壁上,所述第三驱动电机安装于所述第三安装座上且其输出端同轴连接有所述第二偏心驱动轮,所述第一偏心驱动轮远离所述第二驱动电机的一端偏心设置有拨杆,所述第二固定套上端套设于所述焊枪本体上,所述第二固定套上的底端可转动安装于所述第三安装座上,所述第二固定套上开设有竖向布设的穿孔,所述拨杆滑设于所述穿孔中,所述第三安装座上开设有供所述焊枪本体横向滑移的第二滑移口。第三壳体和第三安装座之间可以采用连接件连接设置也可以采用一体(压铸)成型工艺制备而成。
13.本发明一种手持式摆动焊枪进一步的改进在于,所述焊枪本体前端可角度摆动的安装于所述摆动器上,所述焊枪本体的尾端穿设并定位于手柄中,所述焊枪本体采用软质材料。
14.本发明一种手持式摆动焊枪更进一步的改进在于,所述摆动器包括第四壳体、第四安装座、第四驱动电机、第三偏心驱动轮、第三固定套以及滑动套,所述第四安装座固设于所述第四壳体内壁上,所述第四驱动电机装于所述第四安装座上且其输出端同轴连接有所述第三偏心驱动轮,所述第三偏心驱动轮远离所述第四驱动电机的一端设置有偏心杆,所述偏心杆转动连接于所述第三固定套,所述第三固定套远离所述偏心杆的一端间隙套设于所述焊枪本体上,所述第四安装座竖向开设有摆动口,所述焊枪本体上固设有所述滑动套,所述滑动套内置于所述摆动口中且所述滑动套尺寸适配于所述摆动口尺寸,所述滑动套上形成有轴肩,所述轴肩间隙设置于所述第四安装座和所述第三固定套之间。第四壳体和第四安装座之间可以采用连接件连接设置也可以采用一体(压铸)成型工艺制备而成。
15.本发明一种手持式摆动焊枪进一步的改进在于,所述摆动器外表面设置有行走机构,所述行走机构包括连接于所述摆动器外表面的连接架、转动安装于所述连接架上的跟踪轮。
16.本发明一种手持式摆动焊枪进一步的改进在于,所述行走机构还包括安装于所述连接架上的自动行走电机,所述自动行走电机通过传导机构传动连接于所述跟踪轮。
17.本发明一种手持式摆动焊枪进一步的改进在于,所述摆动器可相对于所述手柄转动0-90
°
。
18.本发明一种手持式摆动焊枪进一步的改进在于,所述手柄内侧设有阻尼套,所述摆动器可转动套设于所述阻尼套中。
19.本发明的有益效果在于:
20.(1)根据实际焊缝要求,对焊枪本体的摆动进行调节,通过焊枪本体的摆动和沿焊缝方向的移动合成焊接轨迹,人工仅控制焊缝方向的移动即可有效保证焊接质量;与现有手工焊接相比降低了焊接难度,并且无需铺设小车轨道或相应的工装夹具对工件进行定位,可降低生产成本;
21.(2)结合行走机构可以实现对焊缝位置进行跟踪,辅助行走可进一步降低焊接操作难度;其中当行走机构采用自动行走机构时,上述的手持式摆动焊枪可以实现焊枪主体的摆动和行车,其保留了手工移动操作的灵活性同时使焊接质量和操作过程得到很好的平衡,适合小批量、需要快速变换焊接位置的工况,同时可满足空间狭小不利于铺设设备轨道且对焊接质量要求较高场合的焊接操作;
22.(3)焊枪本体摆动解决焊缝宽度方向上的一致性和均匀性,人工移动或自动行走机构解决焊缝长度方向上的一致性和均匀性,通过减少需要人工控制的要素从而降低对工人的技术要求和劳动强度。
附图说明
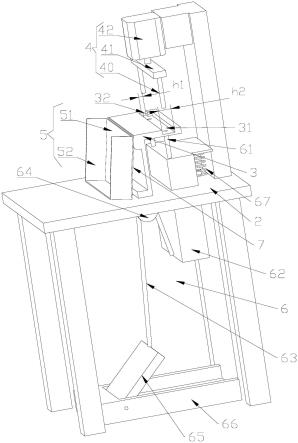
23.图1为本发明一种手持式摆动焊枪立体结构示意图;
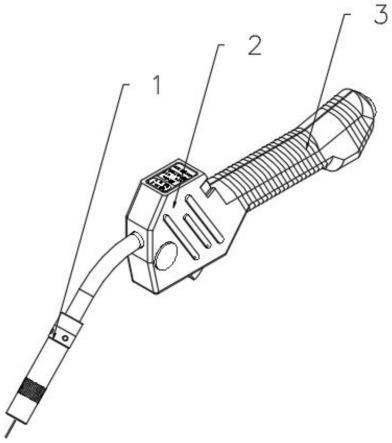
24.图2为本发明一种手持式摆动焊枪使用状态示意图;
25.图3为实施例一中摆动器内部结构示意图;
26.图4为实施例二中摆动器内部结构示意图;
27.图5为实施例二中摆动器内部连接结构示意图;
28.图6为实施例二中第一固定套和第二安装座布设示意图;
29.图7为实施例二中第二安装座结构示意图;
30.图8为实施例三中摆动器内部结构示意图;
31.图9为实施例三中摆动器内部局部放大示意图;
32.图10为实施例三中摆动器平面结构示意图;
33.图11为实施例三中第二固定套结构示意图;
34.图12为实施例三中第三安装座结构示意图;
35.图13为实施例四中竖向摆动使用状态示意图;
36.图14为实施例四中横向摆动使用状态示意图;
37.图15为实施例五中摆动器结构示意图;
38.图16为实施例五中焊枪本体、摆动器使用状态示意图一;
39.图17为图16局部放大示意图;
40.图18为实施例五中焊枪本体、摆动器使用状态示意图二;
41.图19为图18局部放大示意图;
42.图20为行走机构和摆动器连接结构示意图一;
43.图21为行走机构和摆动器连接结构示意图二;
44.图22为行走机构和摆动器连接结构示意图三;
45.图23为图22中自动行车电机和第三跟踪轮连接结构示意图;
46.图24为主控制器控制原理图。
47.图中:1、焊枪本体;2、摆动器;211第一安装座;212、第一驱动电机;213、驱动齿轮;214、从动齿轮;221、第二安装座;2211、第一滑移口;222、第二驱动电机;223、第一偏心驱动轮;224、第一固定套;225、连杆;231、第三安装座;2311、第二滑移口;232、第三驱动电机;233、第二偏心驱动轮;234、第二固定套;2341、穿孔;235、拨杆;241、第四安装座;2411、摆动口;242、第四驱动电机;243、第三偏心驱动轮;244、第三固定套;245、滑动套;2451、轴肩;246、偏心杆;3、手柄;4、行走机构;41、第一连接架;42、第一跟踪轮;43、万向调节支架;431、第一万向杆;432、第二万向杆;44、第二连接架;45、第二跟踪轮;46、第三连接架;47、自动行车电机;48、传导机构;49、第三跟踪轮;5、主控制器;6、显示屏模块;7、数字旋转编码器-中位按钮一体模块。
具体实施方式
48.为利于对本发明的了解,以下结合附图及实施例进行说明。
49.参阅图1至图24可知,本发明公开了一种手持式摆动焊枪,包括焊枪本体1、摆动器2以及手柄3,焊枪本体1可摆动的安装于摆动器2上,焊枪本体1尾端外露于摆动器2,摆动器2与手柄3一体或分体设置。本实施例中,通过摆动器2实现焊枪本体1前端的摆动,通过焊枪本体1前端的摆动和焊缝方向的移动合成焊接轨迹,人工仅控制焊缝方向的移动即可轻松焊接出高质量的焊缝。
50.具体的,手柄3和摆动器2之间存在两种布设方式:(1)手柄3设置于摆动器2后端,焊枪本体1尾端外露于摆动器2且穿设定位于手柄3中;(2)手柄设置于摆动器上侧或下侧,此时焊枪本体无需穿设定位于手柄3中。
51.实施例一:焊枪本体1可360
°
旋转摆动的安装于摆动器2上,即焊枪本体1可在摆动器2带动下旋转摆动。
52.如图1、3所示,摆动器2包括第一壳体(图中未标注)、第一安装座211、第一驱动电机212以及相互外啮合的驱动齿轮213和从动齿轮214,第一安装座211固设于第一壳体内壁上,第一驱动电机212安装于第一安装座211上且其输出端同轴连接有驱动齿轮213,从动齿轮214同轴连接于焊枪本体1,焊枪本体1前端转动安装于第一安装座211上。
53.本实施例中,通过第一驱动电机212、驱动齿轮213和从动齿轮214带动焊枪本体1周向旋转摆动。
54.优选的,(1)从动齿轮214轴向形成有第一定位孔,焊枪本体1同轴安装于第一定位孔中,第一安装座211上形成有供焊枪本体1穿设的安装孔,焊枪本体1通过转动件(轴承等)可转动安装于安装孔位置;(2)摆动器2(第一壳体)与手柄3一体设置,手柄3中形成有供焊枪本体1尾端转动安装的转动空间,即焊枪本体1相对于第一壳体、穿孔2341周向旋转摆动,转动空间尺寸适配于焊枪本体1尾端尺寸且同轴设置。
55.实际使用中,相互外啮合的驱动齿轮213和从动齿轮214可以采用现有的传动机构(例如皮带轮传动机构、链轮传动机构、摩擦轮传动机构等)替换,可以达到相同的传动效果。
56.实施例二:焊枪本体1可竖向摆动的安装于摆动器2上。
57.进一步的,第一偏心驱动轮223、连杆225以及第一固定套224(第一滑移口2211)构成了一个曲柄滑块机构,利用第一偏心驱动轮223的转动实现第一固定套224相对于第二安
装座221竖向的运动(带有一定幅度的摆动),继而实现焊枪本体1相对于第一滑移口2211作竖向方向上来回的摆动。
58.优选的,摆动器2与手柄3一体设置,手柄3中形成有供焊枪本体1尾端竖向来回摆动的第一摆动空间,非使用状态时焊枪本体1尾端穿设定位于第一摆动空间中。
59.优选的,第一固定套224上设有用于套设焊枪本体1的第二定位孔(图中未显示),焊枪本体1竖向摆动过程中相对于第二定位孔作一定角度的相对来回转动。
60.实施例三:焊枪本体1可横向摆动的安装于摆动器2上。
61.如图1、8-12所示,摆动器2包括第三壳体、第三安装座231、第三驱动电机232、第二偏心驱动轮233以及第二固定套234,第三安装座231固设于第三壳体内壁上,第三驱动电机232安装于第三安装座231上且其输出端同轴连接有第二偏心驱动轮233,第一偏心驱动轮223远离第二驱动电机222的一端偏心设置有拨杆235,第二固定套234上端套设于焊枪本体1上,第二固定套234上的底端可转动安装于第三安装座231上,第二固定套234上开设有竖向布设的穿孔2341,拨杆235滑设于穿孔2341中,第三安装座231上开设有供焊枪本体1横向滑移的第二滑移口2311。
62.本实施例中,(1)第二固定套234上形成有用于套装焊枪本体1的第一套孔,第一套孔的内径尺寸略大于套接处焊枪本体1外径尺寸,当第二偏心驱动轮233转动过程中,第二固定套234在拨杆235作用下相对于转动点(即第二固定套234与第三安装座231之间转动连接点)摆动,此时焊枪本体1在第二固定套234带动下沿第二滑移口2311横向来回摆动。
63.优选的,摆动器2(第三壳体)与手柄3一体设置,手柄3中形成有供焊枪本体1尾端横向摆动的第二摆动空间,非使用状态时焊枪本体1尾端穿设定位于第二摆动空间中。
64.实施例四:摆动器2与手柄3分体设置且两者之间可相对转动一定角度,转动一定角度后再相互间定位(相互之间的定位可以采用现有技术中的定位结构,上述非本发明改进点,此处不作详述),焊枪本体1可竖向和横向摆动的安装于摆动器2上。
65.其中摆动器2可以采用以下结构:
66.结构一:如图1、4-7和图13所示,摆动器2包括第二壳体(与手柄3一体设置)、第二安装座221、第二驱动电机222、第一偏心驱动轮223、第一固定套224,第二安装座221固设于第二壳体内壁上,第二驱动电机222安装于第二安装座221上且其输出端同轴连接有第一偏心驱动轮223,第一偏心驱动轮223远离第二驱动电机222的一端偏心设置有连杆225,连杆225转动连接于第一固定套224,第一固定套224套设于焊枪本体1上,第二安装座221上开设有供焊枪本体1竖向滑移的第一滑移口2211。
67.结构二:如1、图8-12和图14所示,摆动器2包括第三壳体(与手柄3一体设置)、第三安装座231、第三驱动电机232、第二偏心驱动轮233以及第二固定套234,第三安装座231固设于第三壳体内壁上,第三驱动电机232安装于第三安装座231上且其输出端同轴连接有第二偏心驱动轮233,第一偏心驱动轮223远离第二驱动电机222的一端偏心设置有拨杆235,第二固定套234上端套设于焊枪本体1上,第二固定套234上的底端可转动安装于第三安装座231上,第二固定套234上开设有竖向布设的穿孔2341,拨杆235滑设于穿孔2341中,第三安装座231上开设有供焊枪本体1横向滑移的第二滑移口2311。
68.具体的,(1)摆动器2采用上述结构一、结构二中的任一结构,由于摆动器2和手柄3采用分体设置的结构,因而当需要纵向、横向摆动切换时,仅需将摆动器2相对于手柄3转动
90
°
(焊枪本体1与摆动器同步转动90
°
),即可实现焊接纵向、横向摆动之间的快速切换,结构简单、便于调节,本实施例中通过采用一种摆动器-焊枪本体的结构即可实现横向、纵向两种摆动的切换,无需设置两组摆动器2,结构简单,便于快速操作,提高了操作效率,增强了实用性;(2)手柄3中形成有供焊枪本体1尾端横向摆动的第三摆动空间,非使用状态时焊枪本体1尾端穿设定位于第三摆动空间中。
69.结构一、结构二中摆动器2所采用的结构分别与实施例二、实施例三中的结构相同,此处不作重复描述。实际使用中选用竖向摆动、横向摆动取决于焊缝与焊枪之间的相对位置关系,以及焊接时所采用的运枪轨迹(焊枪本体1最前端的运动轨迹)。
70.实施例五:焊枪本体1前端可角度摆动的安装于摆动器2上,其中摆动器2和手柄3之间可以采用一体或分体两种设计结构,焊枪本体1尾端穿设定位于手柄3中。
71.如图1、15-19所示,摆动器2包括第四壳体(图中未标注)、第四安装座241、第四驱动电机242、第三偏心驱动轮243、第三固定套244以及滑动套245,第四安装座241固设于第四壳体内壁上,第四驱动电机242装于第四安装座241上且其输出端同轴连接有第三偏心驱动轮243,第三偏心驱动轮243远离第四驱动电机242的一端设置有偏心杆246,偏心杆246转动连接于第三固定套244,第三固定套244远离偏心杆246的一端间隙套设于焊枪本体1上,第四安装座241竖向开设有摆动口2411,焊枪本体1上固设有滑动套245,滑动套245内置于摆动口2411中且滑动套245尺寸适配于摆动口2411尺寸,滑动套245上形成有轴肩2451,轴肩2451间隙设置于第四安装座241和第三固定套244之间。实际使用中,第三固定套244与焊枪本体1之间的间隙、轴肩2451与第四安装座241以及第三固定套244之间的间隙大小的选择会影响焊枪本体1前端摆动角度的大小,因此根据实际所需摆动角度选择适当的间隙,而实际所需摆动角度跟焊接工艺、焊缝宽度有关。
72.本实施例中,(1)焊枪本体1采用软质材料,焊枪本体1的尾端穿设并定位于手柄3中;(2)摆动口2411尺寸大于滑动套245尺寸且形成有供滑动套245上下摆动的摆动区域;(3)在第三偏心驱动轮243的作用下,焊枪本体1的前端受到上下运动的作用力,受限于焊枪本体1的尾端定位于手柄3中(即焊枪本体1的摆动中心点位于手柄3内部),且轴肩2451间隙设置于第四安装座241和第三固定套244之间,同时由于焊枪本体1为软质材料,因此当焊枪本体1的前端在第三偏心驱动轮243、第三固定套244作用下会相对于摆动口2411上下一定角度摆动;(4)第三固定套244上形成有用于套设焊枪本体1的第二套孔,当第二套孔与焊枪本体1同轴布设时,第二套孔孔壁与焊枪本体1外壁之间存在一定间隙,进一步的,第二套孔孔壁上还倒圆角处理;(5)手柄3中形成有供焊枪本体1尾端穿设定位的定位空间,焊枪本体1不可以相对于第三摆动空间转动或者在工作时焊枪本体1尾端周向转动自由度受限。
73.具体的,第四安装座241包括两个平行设置的固定板以及连接两个固定板的连接支架,第三固定套244布设于两个固定板之间,两个固定板上分别对位形成有上述的摆动口2411,焊枪本体1上固设有两个滑动套245,两个滑动套245分别内置于对应侧的摆动口2411中,两个滑动套245相靠近的一端分别设有上述的轴肩2451,两个轴肩2451分别位于第三固定套244的两侧,滑动套245与对应侧的固定板之间间隙设置。
74.如图20-23所示,本发明中的一种手持式摆动焊枪还包括行走机构4,行走机构4安装设置于摆动器2的外侧,通过设置行走机构4可实现对焊缝位置的跟踪,配合摆动器2,降低焊接操作难度的同时保证焊接质量。
75.行走机构可采用以下几种实施例:
76.实施例一,如图20所示,行走机构4包括连接于摆动器2外侧的第一连接架41、转动安装于第一连接架41上的第一跟踪轮42。手持手柄3利用第一跟踪轮实现焊枪沿焊接位置滑移,可有效降低劳动强度,减轻工人焊接疲劳度。第一连接架选用可拆装或固定的方式连接于摆动器2。
77.实施例二,如图21所示,行走机构包括万向调节支架43,万向调节支架43的两端分别连接于摆动器2和第二连接架44,第二连接架44上转动安装有第二跟踪轮45,第二跟踪轮至少包括一组对位布设的两个轮体,两个轮体之间形成跟踪卡槽,用于跟踪定位于焊缝外侧边沿处。
78.进一步的,万向调节支架包括万向连接于摆动器2外侧的第一万向杆431、转动连接于第一万向杆431的第二万向杆432,第二万向杆432远离第一万向杆431的一端万向连接有第二连接架432。
79.具体的,万向调节支架43可采用现有技术中的强磁大万向支架、万向微调磁力表架等,其自带有锁紧结构或阻尼结构,上述万向调节支架为现有技术,具体结构不作详述。
80.实施例三,如图22-23所示,行走机构包括连接于摆动器2外侧的第三连接架46、安装于第三连接架46上的自动行走电机47以及可转动安装于第三连接架46上的第三跟踪轮49,通过自动行走电机带动第三跟踪轮转动。具体的,(1)自动行走电机47输出端通过传导机构48传动连接于第三跟踪轮49,传导机构可采用例如锥齿轮、蜗轮蜗杆等传动机构;(2)包括多组第三跟踪轮,每组第三跟踪轮包括两个对位布设的轮体,自动行走电机带动其中一组第三跟踪轮中的轮体转动,即两组第三跟踪轮分别为主动轮和从动轮。
81.如图24所示,进一步的,还包括相互电信号联接的主控制器和电机驱动模块,电机驱动模块电信号联接于自动行走电机,用于控制自动行走电机转动。主控制器和电机驱动模块内置于摆动器2或第三连接架中。更进一步的,行走机构还包括用于控制第三跟踪轮行车方向的转向单元,主控制器电信号联接于转向单元,以此调节行车机构的行走方向。综上可知,行走机构行走方向和速度由控制器根据运枪轨迹自动匹配焊枪摆动和自动行走,从而实现平面任意轨迹。
82.本发明中的手持式摆动焊枪还包括设置于摆动器2上且均电信号联接于主控制器的显示屏模块、数字旋转编码器-中位按钮一体模块,电机驱动模块电信号联接于焊枪摆动电机(具体包括第一驱动电机、第二驱动电机、第三驱动电机以及第四驱动电机);通过数字旋转编码器-中位按钮一体模块向主控制器输入信号,通过主控制器向显示屏模块传输系统信息显示信号,同时通过主控制器向电机驱动模块输出电机控制信号,用于分别控制自动行走电机和焊枪摆动电机。
83.具体的,通过数字旋转编码器-中位按钮一体模块实现对菜单进行选择与非选择状态(按一下选中,再按一下非选中),旋钮处于选中时,左旋减少选中项对应的参数的数值,右旋增大选中项对应的参数的数值;旋钮处于非选中状态时,左旋菜单预选框左移,右旋菜单预选框右移,实现显示屏模块中菜单项(即功能)的切换。
84.本发明中,(1)当手柄设置于摆动器2后端,焊枪本体1尾端外露于摆动器2且穿设定位于手柄3中时,摆动器2转动连接于手柄3且两种之间设置有阻尼套,利用阻尼套的摩擦力,为实现摆动器2和手柄3转动到位后的一种定位方式;(2)焊枪本体1表面固设有隔热层,
起到隔绝热量的作用,避免烫伤。
85.利用摆动器实现竖向摆动、横向摆动时,还可以采用现有技术中常见的凸轮摆动机构、齿轮齿条摆动机构实现竖向或横向摆动;具体的,(1)凸轮摆动机构包括凸轮(转动安装于摆动器内壁上)和顶杆(连接于焊枪本体1),凸轮旋转时带动顶杆沿特定直线方向来回运动,以此带动焊枪本体1竖向或横向摆动;(2)齿轮齿条摆动机构包括相互啮合的齿轮(转动安装于摆动器内壁上)和齿条(连接于焊枪主体1),齿条在齿轮带动下来回摆动,以此带动焊枪本体竖向或横向摆动。
86.本发明中,旋转摆动、横向摆动、竖向摆动以及角度摆动,配合行走方向可实现多种运枪轨迹,如果配合自动行走机构可以实现任意二维运枪轨迹。
87.以上仅是本发明的较佳实施例而已,并非对本发明做任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案的范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
88.需要说明的是,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容的能涵盖的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。