1.本实用新型涉及食品加工设备领域,具体是一种罐头加工的自动灌装设备。
背景技术:
2.宠物罐头自动灌装设备是一种用于宠物罐头灌装的辅助装置,其在灌装设备的领域中得到了广泛的使用;现有的宠物罐头灌装方式多是人工手动进行灌装,灌装效率差,耗费时间长,劳动强度高,不利于批量化进行灌装作业,限制性较高。
技术实现要素:
3.有鉴于此,本实用新型的目的是提供一种罐头加工的自动灌装设备,能够对宠物罐头进行自动灌装。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.本实用新型的一种罐头加工的自动灌装设备,包括机架、用于运输空罐的传送带、用于存放原料的原料桶、用于对原料桶和空罐进行对位的定位器、用于在原料桶与空罐对位时停止传送带的第一控制器、用于在原料桶与空罐对位时产生控制信号的第二控制器、用于根据控制信号将原料桶内的原料进行定量输出的定量灌装模块、在完成定量灌装后控制传送带继续运动的第三控制器;
6.所述传送带设置在所述机架上,所述原料桶设置在机架上,所述原料桶的底部设有开口,所述定量灌装模块设置在开口处,所述定位器、所述第一控制器、所述第二控制器均设置在所述机架上;所述定位器与所述第一控制器连接,所述第一控制器、所述第二控制器、所述第三控制器依次连接。
7.进一步地,所述定量灌装模块包括:用于根据所述控制信号进行定量转动的电机子模块、用于推动原料的扇叶、设置在所述开口处的弯折管,所述扇叶设置在所述电机子模块上,所述扇叶、电机子模块均设置在所述弯折管内。
8.进一步地,所述电机子模块包括电机驱动芯片、步进电机,所述步进电机通过所述电机驱动芯片与所述第一控制器连接。
9.进一步地,所述定位器包括多个红外发射单元、多个红外接收单元,所述红外发射单元与所述红外接收单元一一对应设置,多个所述红外接收单元与所述第一控制器连接,所述第一控制器在多个所述红外接收单元均丢失红外信号时产生所述控制信号。
10.进一步地,所述第一控制器、所述第三控制器均为plc控制模组。
11.本实用新型的有益效果是:本实用新型的一种罐头加工的自动灌装设备,通过传送带源源不断地将空罐传送至原料桶下方,并通过对位器将空罐与原料桶进行对位,在对位成功时停止传送带,并通过定量灌装模块将原料桶中的原料定量地灌装至空罐中,完成灌装后控制传送带继续运动,从而对传送带上的空罐一直进行灌装。本实用新型可以自动进行灌装,以提升罐头的生产效率。
附图说明
12.下面结合附图和实施例对本实用新型作进一步描述:
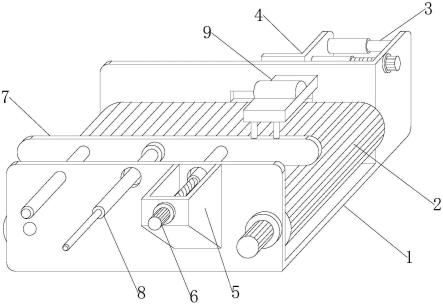
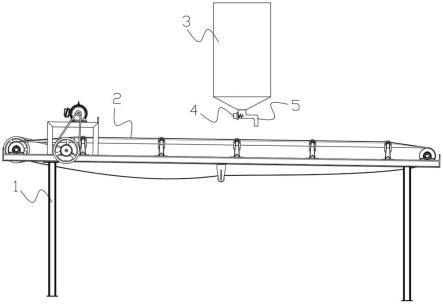
13.图1为本实用新型的传送带与原料桶的结构示意图;
14.图2为本实用新型的控制结构示意图;
15.附图标记如下:1-机架、2-传送带、3-原料桶、4-电机子模块、5-弯折管
具体实施方式
16.如图1-图2所示:本实施例的一种罐头加工的自动灌装设备,包括机架1、用于运输空罐的传送带2、用于存放原料的原料桶3、用于对原料桶3和空罐进行对位的定位器、用于在原料桶3与空罐对位时停止传送带2的第一控制器、用于在原料桶3与空罐对位时产生控制信号的第二控制器、用于根据控制信号将原料桶3内的原料进行定量输出的定量灌装模块、在完成定量灌装后控制传送带2继续运动的第三控制器;
17.传送带2设置在机架1上,原料桶3设置在机架1上,原料桶3的底部设有开口,定量灌装模块设置在开口处,定位器、第一控制器、第二控制器均设置在机架1上;定位器与第一控制器连接,第一控制器、第二控制器、第三控制器依次连接。
18.具体实施过程如下:
19.传送带2带动空罐运动至原料桶3的下方,并通过对位器进行准备对位,使得原料桶3上的定量灌装模块针对空罐;
20.对位成功后,第一控制器控制传送带2停转,然后控制定量灌装模块进行定量灌装,灌装成功后,第三控制器控制传送带2恢复运动。本实施例中,第一控制器和第三控制器为同一型号控制器,均为plc控制器。第二控制器为单片机。
21.在一些实施例中,定量灌装模块包括:用于根据控制信号进行定量转动的电机子模块4、用于推动原料的扇叶、设置在开口处的弯折管5,扇叶设置在电机子模块4上,扇叶、电机子模块4均设置在弯折管5内。
22.弯折管5的形状为z字形,第一段连接原料桶3的开口,第二段为水平段,防止原料通过重力直接掉落,第三段竖直朝向空罐,电机子模块4设置在水平段的外部,扇叶设置在水平段的内部、
23.在一些实施例中,电机子模块4包括电机驱动芯片、步进电机,步进电机通过电机驱动芯片与第一控制器连接,电机驱动芯片为双h桥电机驱动器。
24.在一些实施例中,定位器包括多个红外发射单元、多个红外接收单元,红外发射单元与红外接收单元一一对应设置,多个红外接收单元与第一控制器连接,第一控制器在多个红外接收单元均丢失红外信号时产生控制信号。
25.多个红外发射器圆周分布,与空罐的截面形状一致,当空罐将所有的红外发射器挡住时,说明对位成功。
26.综上所述,本实用新型的一种罐头加工的自动灌装设备,通过传送带2源源不断地将空罐传送至原料桶3下方,并通过对位器将空罐与原料桶3进行对位,在对位成功时停止传送带2,并通过定量灌装模块将原料桶3中的原料定量地灌装至空罐中,完成灌装后控制传送带2继续运动,从而对传送带2上的空罐一直进行灌装。本实用新型可以自动进行灌装,以提升罐头的生产效率。
27.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
技术特征:
1.一种罐头加工的自动灌装设备,其特征在于:包括机架、用于运输空罐的传送带、用于存放原料的原料桶、用于对原料桶和空罐进行对位的定位器、用于在原料桶与空罐对位时停止传送带的第一控制器、用于在原料桶与空罐对位时产生控制信号的第二控制器、用于根据控制信号将原料桶内的原料进行定量输出的定量灌装模块、在完成定量灌装后控制传送带继续运动的第三控制器;所述传送带设置在所述机架上,所述原料桶设置在机架上,所述原料桶的底部设有开口,所述定量灌装模块设置在开口处,所述定位器、所述第一控制器、所述第二控制器均设置在所述机架上;所述定位器与所述第一控制器连接,所述第一控制器、所述第二控制器、所述第三控制器依次连接。2.根据权利要求1所述的一种罐头加工的自动灌装设备,其特征在于:所述定量灌装模块包括:用于根据所述控制信号进行定量转动的电机子模块、用于推动原料的扇叶、设置在所述开口处的弯折管,所述扇叶设置在所述电机子模块上,所述扇叶、电机子模块均设置在所述弯折管内。3.根据权利要求2所述的一种罐头加工的自动灌装设备,其特征在于:所述电机子模块包括电机驱动芯片、步进电机,所述步进电机通过所述电机驱动芯片与所述第一控制器连接。4.根据权利要求1所述的一种罐头加工的自动灌装设备,其特征在于:所述定位器包括多个红外发射单元、多个红外接收单元,所述红外发射单元与所述红外接收单元一一对应设置,多个所述红外接收单元与所述第一控制器连接,所述第一控制器在多个所述红外接收单元均丢失红外信号时产生所述控制信号。5.根据权利要求1所述的一种罐头加工的自动灌装设备,其特征在于:所述第一控制器、所述第三控制器均为plc控制模组。
技术总结
本实用新型涉及一种罐头加工的自动灌装设备,包括机架、用于运输空罐的传送带、用于存放原料的原料桶、用于对原料桶和空罐进行对位的定位器、用于在原料桶与空罐对位时停止传送带的第一控制器、用于在原料桶与空罐对位时产生控制信号的第二控制器、用于根据控制信号将原料桶内的原料进行定量输出的定量灌装模块、在完成定量灌装后控制传送带继续运动的第三控制器;通过传送带源源不断地将空罐传送至原料桶下方,并通过对位器将空罐与原料桶进行对位,在对位成功时停止传送带,并通过定量灌装模块将原料桶中的原料定量地灌装至空罐中,完成灌装后控制传送带继续运动,从而对传送带上的空罐一直进行灌装。的空罐一直进行灌装。的空罐一直进行灌装。
技术研发人员:司榆枫 魏光容 孙丽华
受保护的技术使用者:重庆市农产品集团食品科技有限公司
技术研发日:2022.06.21
技术公布日:2023/1/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。