1.本实用新型涉及挖掘机下车架生产技术领域,具体涉及一种柔性挖掘机下车架焊接组件搬运装置。
背景技术:
2.挖掘机下车架包括履带梁和x架,其中履带梁和x架的具体结构如图1和图2所示,在对挖掘机下车架进行生产时,下车架的组队主要是人工通过行车加吊具将各部分板件按照一定顺序吊装到组队工装上,鉴于履带梁和x架的尺寸、重量存在较大差异,现有的吊装夹具兼容性差,在实际的组队过程中需要频繁更换吊具,造成组队过程的自动化程度低,生产效率低。
技术实现要素:
3.为解决上述技术问题,本实用新型一种可实现不同型号挖掘机下车架组件的搬运动作,能够实现机器人自动上下料,从而实现完全自动化生产,全程无人干预,提高生产效率的搬运装置,具体技术方案如下:
4.一种柔性挖掘机下车架焊接组件搬运装置,包括机架,还包括沿机架长度方向对称置于机架顶部的履带梁定位工装以及设置在机架顶部的x架定位工装,其中,所述履带梁定位工装包括设置在机架顶部且能够竖向移动用于固定履带梁的吸附组件,所述x架定位工装包括设置在机架顶部的安装架以及设置在安装架上用于周向固定x架的限位组件。
5.优选的,所述吸附组件包括设置在机架上的吸附支架、竖向设置在吸附支架上的导向件、能够沿导向件位移的基座、通过浮动件设置在基座顶部的电永磁铁以及设置在机架上用于驱动基座位移的液压缸一。
6.优选的,所述浮动件为设置在基座顶部的弹簧,所述基座还设有传感器一。
7.优选的,所述安装架呈筒状,设置在机架顶部,且位于履带梁定位工装之间。
8.优选的,还包括设置在安装架上用于驱动限位组件动作的液压缸二,所述限位组件为多个,且该限位组件沿安装架径向设置。
9.优选的,所述限位组件包括沿安装架顶部径向设置的导轨、能够沿导轨位移的卡爪以及设置在安装架上用于驱动卡爪位移的连杆机构。
10.优选的,所述连杆机构包括设置在液压缸二输出端的驱动块、一端转动设置在驱动块上且另一端与卡爪底端转动相连的连杆。
11.优选的,所述安装架内侧壁还设有传感器二。
12.由以上技术方案可知,本实用新型具有如下有益效果:当需要对履带梁一类的工件进行搬运时,将该搬运装置移动至工件上方,利用履带梁定位工装中的吸附组件对从两端对工件进行固定;而当需要对x架一类的工件进行搬运时,将该搬运装置移动至工件上方,利用安装架上的限位组件从周向对工件进行卡紧固定,因此本实用新型通过在机架上集成有能够对履带梁类和x架类工件进行固定的工装,可实现对下车架不同型号的工件进
行搬运,同时吸附组件和限位组件可适应不同型号的工件尺寸,因此具有柔性高、工件兼容性强的特点。
附图说明
13.图1为挖掘机下车架履带梁的结构示意图;
14.图2为挖掘机下车架x架的结构示意图;
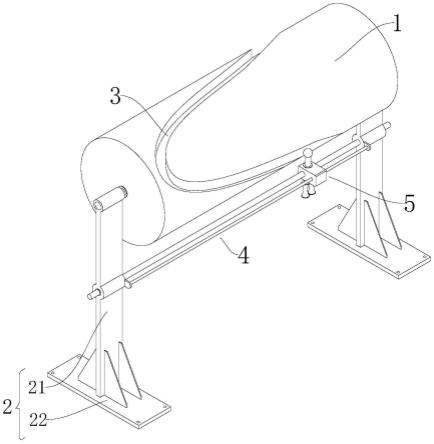
15.图3为本实用新型提供的搬运装置的结构示意图。
16.图中:10、机架;20、履带梁定位工装;211、吸附支架;212、导向件;213、基座;214、浮动件;215、电永磁铁;216、液压缸一;217、传感器一;30、x架定位工装;310、安装架;320、液压缸二;331、导轨;332、卡爪;333、连杆;340、传感器二;40、履带梁;50、x架。
具体实施方式
17.以下结合附图和具体实施例,对本实用新型进行详细说明,在详细说明本实用新型各实施例的技术方案前,对所涉及的名词和术语进行解释说明,在本说明书中,名称相同或标号相同的部件代表相似或相同的结构,且仅限于示意的目的。
18.参照图3,一种柔性挖掘机下车架焊接组件搬运装置,包括机架10、履带梁定位工装20以及x架定位工装30,履带梁定位工装20沿机架10长度方向对称置于机架顶部,x架定位工装30设置在机架顶部,其中,履带梁定位工装包括设置在机架顶部且能够竖向移动用于固定履带梁的吸附组件,x架定位工装包括设置在机架顶部的安装架310以及设置在安装架上用于周向固定x架的限位组件,使用时,当需要对履带梁40一类的工件进行搬运时,将该搬运装置移动至工件上方,利用履带梁定位工装中的吸附组件从两端对工件进行固定;而当需要对x架50一类的工件进行搬运时,将该搬运装置移动至工件上方,利用安装架310上的限位组件从周向对工件进行卡紧固定,因此本实用新型通过在机架10上集成有能够对履带梁类和x架类工件进行固定的工装,可实现对下车架不同型号的工件进行搬运,同时吸附组件和限位组件可适应不同型号的工件尺寸,因此具有柔性高、工件兼容性强的特点。
19.作为本实用新型优选的技术方案,吸附组件包括设置在机架10上的吸附支架211、导向件212、基座213、电永磁铁215以及液压缸一216,导向件212竖向设置在吸附支架211上,具体的,导向件212可设置成沿吸附支架211竖向分布的滑轨,基座213能够沿导向件212位移,电永磁铁215通过浮动件214设置在基座213顶部,液压缸一216设置在机架10上用于驱动基座213位移,这样一来,在液压缸一216的驱动下,驱动基座213沿着导向件212位移,基座213进而带动电永磁铁215与工件接触,从而在电永磁铁215充磁时吸牢工件,由于设置有浮动件214,因此在电永磁铁215与工件接触时,实现与工件稳定地接触。需要说明的是,为进一步提高电永磁铁215与工件的接触效果,电永磁铁215可以根据履带梁的外形轮廓设置在基座213顶部。
20.进一步的,浮动件214为设置在基座213顶部的弹簧,基座213还设有传感器一217,具体的,弹簧可以设置成多个,电永磁铁215设置在弹簧远离基座213的一端,传感器一217的存在可用于检测履带梁工件的两端是否准确放置到电永磁铁215上。
21.做为本实用新型优选的技术方案,安装架310呈筒状,其内部设有空腔,并固定设置在机架10顶部,就本实用新型而言,安装架310设置在机架10顶部中心位置,安装架310位
于履带梁定位工装20之间,这样一来,利用两侧履带梁定位工装20的吸附组件从两端对履带梁类的工件搬运,利用设置在机架10中部的限位组件对x架类的工件进行搬运,以期在搬运时实现对挖掘机下车架不同焊接组件的兼顾。
22.作为本实用新型优选的技术方案,还包括设置在安装架310上用于驱动限位组件动作的液压缸二320,进一步的,限位组件为多个,且多个限位组件沿安装架310径向设置,即限位组件可沿着安装架310的径向同步靠近或远离,从而在与x架接触时实现对x架的固定。
23.进一步的,限位组件包括导轨331、卡爪332以及连杆机构,导轨331沿安装架310顶部径向设置,卡爪332能够沿导轨331位移,连杆机构设置在安装架310上用于驱动卡爪332位移,具体的,连杆机构包括驱动块以及连杆333,驱动块设置在液压缸二320输出端,连杆333一端转动设置在驱动块上且另一端与卡爪332底端转动相连,使用时,利用液压缸二320带动驱动块竖向位移,由于驱动块在竖向移动时通过连杆333驱动卡爪332沿着导轨331位移,从而实现多个卡爪332的靠近或远离。
24.进一步的,在通过该装置对履带梁和x架工件进行搬运时,为了准确的识别工件是否到位,在安装架310内侧壁还设有传感器二340。
25.使用时,搬运履带梁类工件时,搬运装置移至该类工件上方通过控制液压缸一216伸出带动导向件212、浮动件214和电永磁铁215移动使电永磁铁215贴合该类工件,传感器二340检测到工件后,电永磁铁215充磁吸牢该类工件,机器人开始搬运工件到指定位置后电永磁铁215退磁,而后控制液压缸一216缩回到传感器一217能检测的位置,液压缸一216停止工作;
26.当搬运x架类工件时,装置移至该类工件上方,同时传感器一217检测电永磁铁215在初始位置,传感器二340检测到工件后,控制液压缸二320伸出推动连杆333带动卡爪332沿着导轨331移动,卡爪332在相向靠近时卡紧该类工件,机器人开始搬运工件,并在工件到达指定位置后控制液压缸二320缩回初始位置。
27.以上所述实施方式仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新型的技术方案作出的各种变形和改进,均应落入本实用新型的权利要求书确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。