1.本公开的实施例大体上涉及用于车辆的门把手组件,尤其涉及具有隐藏式或半隐藏式门把手的门把手组件。
背景技术:
2.车辆的隐藏式或半隐藏式门把手在闲置时处于缩回位置,以保持门把手的外表面大体上与车门外钣金的表面齐平,使门把手处于隐藏式或半隐藏式的状态。当需要使用时,门把手需要从缩回位置运动到展开位置,使得操作者的手能够握持或操作门把手,以通过门把手执行开门或开锁操作。
技术实现要素:
3.本公开提供了一种用于车辆的门把手组件,包括:把手座、把手、滑块和执行器。把手座上设有转轴,转轴沿车辆的长度方向延伸。把手连接至转轴,并配置为能够围绕转轴的轴线枢转,以在缩回位置和展开位置之间运动。滑块可线性移动地设置在把手座中,滑块配置为通过其沿第一方向的前进移动带动把手从缩回位置转动到展开位置,并能够沿与第一方向相反的第二方向后退移动,以使得把手能够从所述展开位置转动到所述缩回位置。执行器配置为驱动滑块沿第一方向前进和沿第二方向后退。
4.根据上述的门把手组件,把手包括把手握持部和连接在把手握持部的后侧的一对连接臂,把手握持部通过一对连接臂连接至转轴。滑块包括一对驱动面,一对驱动面设置在滑块的前侧上,一对驱动面被配置为分别驱动一对连接臂,以使得把手从缩回位置转动到展开位置。
5.根据上述的门把手组件,一对驱动面中的每一个驱动面在第一方向上逐渐远离把手延伸。
6.根据上述的门把手组件,一对驱动面中的每一个驱动面为斜面。
7.根据上述的门把手组件,还包括弹簧,弹簧的第一端连接至把手座,第二端连接至把手,弹簧配置为通过复原力使把手从展开位置转动到缩回位置。
8.根据上述的门把手组件,把手还包括挡片,挡片设置在一对连接臂之间,弹簧的第二端连接至挡片。
9.根据上述的门把手组件,把手座中设有引导槽。滑块包括引导件,引导件设置在滑块的后侧上,并且引导件配置为能够在引导槽中移动,以使得滑块可线性移动地设置在把手座中。
10.根据上述的门把手组件,把手座中还设有支撑台,支撑台位于引导槽下方,并具有大体平行于引导槽延伸的支撑面,以在滑块移动时支撑滑块。
11.根据上述的门把手组件,第一方向和第二方向平行于车辆的长度方向。
12.根据上述的门把手组件,执行器包括驱动轴,驱动轴与滑块相连接,以带动滑块沿第一方向前进和沿第二方向后退。
附图说明
13.图1a是根据本公开的一个实施例的用于车辆的门把手组件的立体图;
14.图1b是图1a所示的门把手组件的部分分解图;
15.图2是图1b中的把手座的立体图;
16.图3a是图1a中的把手的从后向前看的立体图;
17.图3b是图1a中的把手的从前向后看的立体图;
18.图4是图1a中的虚线框部分的局部放大图;
19.图5a是图1b中的滑块的从前向后看的立体图;
20.图5b是图5a中的滑块的俯视图;
21.图5c是图5a中的滑块的从后向前看的放大的立体图;
22.图6a是图1a中的门把手组件在把手处于缩回位置时的俯视图,其中移除了把手座;
23.图6b是图1a中的门把手组件在把手处于半展开位置时的俯视图,其中移除了把手座;
24.图6c是图1a中的门把手组件在把手处于展开位置时的俯视图,其中移除了把手座;
25.图7是图1a中的门把手组件在把手处于展开位置时的立体图。
具体实施方式
26.下面将参考构成本说明书一部分的附图对本公开的各种具体实施方式进行描述。应该理解的是,虽然在本公开中使用表示方向的术语,诸如“前”、“后”、“上”、“下”、“左”、“右”、“顶”、“底”等描述本公开的各种示例结构部分和元件,但是在此使用这些术语只是为了方便说明的目的,基于附图中显示的示例方位而确定的。由于本公开所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制。
27.本公开的实施例提供一种用于车辆的门把手组件,该门把手组件中的把手为隐藏式或半隐藏式把手,且该门把手组件自动展开和缩回门把手,使门把手在使用状态和闲置状态之间切换。
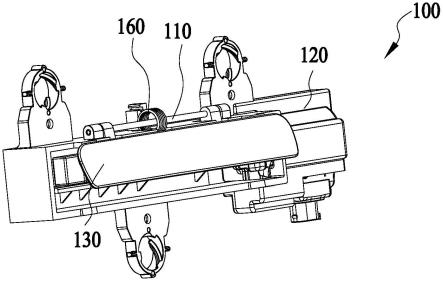
28.图1a和1b示出了根据本公开的一个实施例的用于车辆的门把手组件100的总体结构。其中,图1a是门把手组件100的立体图,图1b是门把手组件100的部分分解图。如图1a和1b所示,门把手组件100包括把手座120和把手130,以及用于将把手130可转动地连接至把手座120的转轴110。把手130具有缩回位置(闲置状态)和展开位置(使用状态),把手130通过转动在缩回位置和展开位置之间运动。门把手组件100还包括用于驱动把手130从缩回位置转动到展开位置的执行器150和滑块140,以及用于使把手130从展开位置转动到缩回位置的弹簧160。门把手组件100还包括设置在把手座120上的数个安装部170,用于将门把手组件100安装到车门钣金的内侧上。当车门把手组件100在车门钣金上安装到位后,处于缩回位置的把手130的外侧表面135大体上与车门外表面齐平。
29.仍然如图1a和1b所示,转轴110设置在把手座120上,并沿着车辆的长度方向x延伸,转轴110具有轴线115。把手130连接至转轴110,并能够围绕转轴110的轴线115转动,从而把手130可以相对于把手座120转动。弹簧160为扭簧,其套设在转轴115上。弹簧160的第
一端162和第二端164分别连接至把手座120和把手130。执行器150包括驱动轴155,驱动轴155与滑块140相连接。执行器150为线性执行器,其通过驱动轴155输出线性驱动力。滑块140可线性移动地设置在把手座120中,并可沿第一方向a1前进移动,以及沿与第一方向a1相反的第二方向a2后退移动。其中,第一方向a1和第二方向a2大致平行于车辆的长度方向x。滑块140的前进和后退移动由执行器150驱动,并且滑块140的前进移动带动把手130从缩回位置转动到展开位置。执行器150的驱动轴155能够逐渐向外伸出以推动滑块140前进。在把手130从缩回位置转动到展开位置的过程中,弹簧160被压缩,从而蓄积复原力。因此,当执行器150的驱动轴155向内退回而带动滑块140沿着第二方向a2后退时,把手130不再受到滑块140施加的驱动力,从而能够在弹簧160的复原力的作用下从展开位置向缩回位置运动。
30.图2是图1b中的把手座120的立体图。如图2所示,把手座120包括主体部210,主体部210中设有用于容纳滑块140的第一容腔212,以及用于容纳执行器150的第二容腔214。第一容腔212和第二容腔214沿着x方向并排布置,并相互连通,以使得执行器150的驱动轴155能够从第二容腔214伸入第一容腔212中,从而推动滑块140移动。第一容腔212包括面向把手130的开口部223和与开口部223相对设置的底部225,把手130的一部分从开口部223进入第一容腔212中,以接触位于第一容腔212中的滑块140。
31.把手座120包括设置在第一容腔212的底部225上的引导槽263,引导槽263用于引导滑块140线性移动。引导槽263沿着车辆的长度方向x延伸,并贯穿第一容腔212的底部225。把手座120还包括设置在第一容腔212中的支撑台265,支撑台265连接至第一容腔212的底部225,并位于引导槽263的下方。支撑台265具有大体上平行于引导槽263延伸的支撑面267,用于在滑块140沿着引导槽263移动时支撑滑块140。
32.把手座120包括一对转轴安装部271,一对转轴安装部271彼此间隔一定距离并位于第一容腔212的上方。转轴110的两端分别由一对转轴安装部271所支撑,以将转轴110安装在一对转轴安装部271之间。把手座120还包括弹簧安装部275,弹簧安装部275位于第一容腔212的上方,并位于一对转轴安装部271之间。弹簧安装部275上设有限位槽277,用于容纳弹簧160的第一端162。
33.图3a和3b示出了图1b中的把手130的具体结构,其中,图3a是把手130的从后向前看的立体图,图3b是把手130的从前向后看的立体图。如图3a和3b所示,把手130包括把手握持部340和一对连接臂321,321’,一对连接臂321,321’连接至把手握持部340的后侧344,以将把手握持部340连接至转轴110。一对连接臂321,321’之间沿车身的长度方向x相隔一定距离。每个连接臂321,321’大体上呈l形,其包括相互连接的长臂部323,323’和短臂部325,325’,其中,长臂部323,323’大体上平行于把手握持部340在车辆的高度方向上延伸,短臂部325,325’大体上垂直于把手握持部340在车辆的宽度方向上延伸。滑块140通过直接推动连接臂321,321’的长臂部323,323’而带动把手130转动。把手130还包括设置在一对连接臂321,321’之间的挡片360,挡片360连接至一对连接臂321,321’。弹簧160的第二端164连接至挡片360。挡片360的面向把手握持部340的一侧上设有用于容纳弹簧160的第二端164的限位槽365。
34.图4是图1a中的虚线框部分p的局部放大图,用于示出弹簧160与把手130和把手座120的具体连接结构。如图4所示,弹簧160的第一端162插入把手座120上的弹簧安装部275
的限位槽277中,弹簧160的第二端164插入把手130的挡片360的限位槽365中,由此弹簧160分别连接至把手130和把手座120。当把手130处于缩回位置时,弹簧160处于自由状态而未被压缩。随着把手130从缩回位置向展开位置转动,弹簧160被逐渐压缩,从而逐渐蓄积复原力,该复原力可用于使把手130从展开位置回复到缩回位置。
35.图5a-5c示出了图1b中的滑块140的具体结构,其中,图5a是滑块140的从前向后看的立体图,图5b是滑块140的俯视图,图5c是滑块140的从后向前看的放大的立体图。如图5a-5c所示,滑块140大体上呈长条状,其包括面向把手130的前侧511和与前侧511相反的后侧513。滑块140包括位于前侧511上的一对驱动面521,521’,驱动面521,521’分别用于驱动把手130的一对连接臂321,321’。滑块140还包括位于前侧511上的一对释放面523,523’和一对保持面525,525’。在滑块140的前进方向(即第一方向a1)上,一对释放面523,523’分别位于一对驱动面521,521’的下游,并分别与一对驱动面521,521’相接,而一对保持面525,525’分别位于一对驱动面521,521’的上游,并分别与一对驱动面521,521’相接。
36.驱动面521,521’为相对于滑块的移动方向倾斜延伸的斜面。在滑块140的前进方向(即第一方向a1)上,驱动面521,521’逐渐远离把手130延伸。一对释放面523,523’和一对保持面525,525’都大体上平行于滑块140的移动方向延伸。因此,一对释放面523,523’分别与一对驱动面521,521’的最低点相接,而一对保持面525,525’分别与一对驱动面521,521’的最高点相接。驱动面521,521’、释放面523,523’和保持面525,525’相配合,实现把手130在缩回位置和展开位置之间的切换。当把手130的连接臂321,321’抵接释放面523,523’时,把手130处于缩回位置。当把手130的连接臂321,321’抵接驱动面521,521’,并相对于滑块140沿着驱动面521,521’朝向保持面525,525’运动时,把手130能够逐渐离开缩回位置而朝向展开位置转动。当把手130的连接臂321,321’抵接保持面525,525’时,把手130处于展开位置。
37.滑块140还包括位于其后侧513的引导件530,引导件530配置为插入把手座120的引导槽263,并能够沿着引导槽263移动,以使把手130能够在把手座120中线性移动。引导件530大体形成为钩状,其包括引导部532和钩部534,引导部532容纳在把手座的引导槽263中,钩部534穿过引导槽263,将引导件530“钩”在把手座120上,由此使得把手130在把手座120中的线性移动更加平稳。
38.滑块140还包括位于其靠近执行器150的一端的连结部550,用于将滑块140与执行器150相连接。连接部550呈袋状,执行器150的驱动轴155的端部呈凸缘状,袋状的连接部550能够容纳驱动轴155的凸缘状的端部。由此,执行器150的驱动轴155与滑块140连接在一起,使得驱动轴155能够带动滑块140沿着第一方向a1前进和沿着第二方向a2后退。
39.图6a-6c示出了在把手120处于不同位置时,门把手组件100的各个部件之间的相对位置关系,更具体而言,是滑块140与把手130之间的位置关系,其中,为了方便示出滑块140与把手130,移除了把手座120。其中,图6a是门把手组件100在把手130处于缩回位置时的俯视图,图6b是门把手组件100在把手130处于半展开位置时的俯视图,图6c是门把手组件100在把手130处于展开位置时的俯视图。图7示出了门把手组件100在把手130处于展开位置时的立体图。
40.如图6a所示,当滑块140还未受到执行器150的驱动时,滑块140位于其初始位置,而还没有沿着第一方向a1前进,把手130也处于其初始位置,即缩回位置。此时,把手130的
连接臂321,321’抵接滑块140的释放面523,523’,而还未开始接触滑块140的驱动面521,521’。如图6b所示,当执行器150接收到开始工作的信号后,其驱动轴155伸出,滑块140在执行器150的驱动轴155的驱动下开始沿着第一方向a1移动。滑块140在沿着第一方向a1移动的过程中,其驱动面521,521’抵接把手130的连接臂321,321’,由于驱动面521,521’为相对于把手130逐渐升高的斜面,驱动面521,521’会逐渐推动把手130的连接臂321朝向远离滑块140的方向运动,从而使得把手130能够围绕转轴110相对于把手座120向展开位置转动。在此过程中,把手130的连接臂321,321’沿着驱动面521,521’从其最低点运动到最高点,直至到达与驱动面521,521’的最高点相接的保持面525,525’,如图6c和图7所示。把手130的连接臂321,321’抵接滑块140的保持面525,525’后,滑块140的继续前进运动将不能再带动把手130旋转,把手130到达其展开位置。当把手130在展开位置时,操作者可以通过拉动把手130的把手握持部340而使把手130进一步以更大的角度展开,从而能够带动把手130所连接的部件例如拉索、微动开关或传感器等(图中未示出)打开车门或门锁。在把手130从缩回位置转动到展开位置的过程中,弹簧160被压缩。
41.当执行器150接收到停止工作的信号后,其驱动轴155收回,并拉动滑块140沿第二方向a2后退。同时,由于不再受滑块140的推力,把手130会在弹簧160的复原力的作用下从展开位置向缩回位置转动。
42.根据本公开的门把手组件以减少的部件和紧凑的结构实现隐藏式门把手的自动展开和缩回。具体而言,本公开的门把手组件使把手绕沿车辆长度方向x延伸的轴线旋转,并采用线性执行器以及将线性执行器的直线驱动力转化为把手的旋转运动的滑块。这些部件共同组成的门把手组件与采用平推式把手的门把手组件和采用绕其他方向轴线旋转的把手的门把手组件相比,只需采用极少的零部件和紧凑的结构,就能实现隐藏式门把手的自动展开和缩回。并且由于使把手绕沿车辆长度方向x(同时也是把手的长度方向)延伸的轴线旋转,因此有空间设置一个以上的把手连接臂,这可以使把手的旋转运动更加平稳。
43.尽管已经结合以上概述的实施例的实例描述了本公开,但是对于本领域中至少具有普通技术的人员而言,各种替代方案、修改、变化、改进和/或基本等同方案,无论是已知的或是现在或可以不久预见的,都可能是显而易见的。例如,尽管本公开的上述实施例中的门把手组件具有一对连接臂,采用多于一对连接臂的方案也在本公开的保护范围内。例如,尽管本公开的上述实施例中除了驱动面以外,在滑块上还设置了释放面和保持面,但是不设置释放面和保持面的方案也在本公开的保护范围内。另外,本说明书中所描述的技术效果和/或技术问题是示例性而不是限制性的;所以本说明书中的披露可能用于解决其他技术问题和具有其他技术效果和/或可以解决其他技术问题。因此,如上陈述的本公开的实施例的实例旨在是说明性而不是限制性的。在不背离本公开的精神或范围的情况下,可以进行各种改变。因此,本公开旨在包括所有已知或较早开发的替代方案、修改、变化、改进和/或基本等同方案。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。