1.本发明涉及高压射流清洗技术领域,具体涉及一种基于模糊控制的道路标线高压清洗系统及其清洗装置。
背景技术:
2.伴随着社会经济的发展以及人们生活水平的上升,国内家庭的私家车数量也在不断地上升。但大量的私家车在方便人们的同时也极大的增加了路面交通的压力。就目前情况来看,交通标志牌的规范化和道路标线的清晰度就显得尤为重要。交通道路标志牌和标线不仅能减轻交通警察的工作压力,而且可以让司机有效地判断行驶路线,既保证人们出行的安全,又解决道路交通的规范。其中,使用高压水射流技术对道路标线的去除是一项热门的新兴技术手段,相较于国内常见的打磨法、抛丸冲击法等标线去除技术,采用高压水射流清除道路标线不仅对道路路面的损伤很小,且基本不会存在任何的标线残留痕迹。此外,高压水射流清除道路标线具有工程效率高、人工投入少、适用范围广的特点,是目前交通施工部门去除道路标线的首要选择。
3.现有的高压水射流清洗装置采取的都是恒功率工作模式,即只为清洗机构设定一个最大功率时的清洗模式,一旦碰上因路况需要时降低车速或者是标线的完整度较低的情况时,清洗机构依旧以一个最大功率运行的话,不仅会产生不必要的能量损耗,还有可能会对道面产生不可逆的破坏。
4.有鉴于此,提出本技术。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种基于模糊控制的道路标线高压清洗系统及其清洗装置,能有效解决现有技术中的高压水射流清洗装置存在由于采取的工作模式唯一,在面对需要降低车速或者是标线的完整度较低的情况时,不仅会产生不必要的能量损耗,还有可能会对道面产生不可逆的破坏的问题。
6.本发明提供了一种基于模糊控制的道路标线高压清洗系统,包括工况机、速度检测组件、标线检测模块、以及喷头输出压力控制组件;
7.其中,所述速度检测组件的控制端、所述标线检测模块的控制端、所述喷头输出压力控制组件的控制端与所述工况机的控制端电气连接,所述速度检测组件的输出端与所述工况机的输入端电气连接,所述工况机的输出端与所述喷头输出压力控制组件的输入端电气连接,所述喷头输出压力控制组件的输出端用于与清洗装置的清洗喷头连接;
8.其中,所述工况机被配置为通过执行其内部存储的计算机程序以实现如下步骤:
9.接收所述速度检测组件采集并进行放大处理的行走速度信息;
10.接收所述标线检测模块采集到的初始图像,并对所述初始图像进行图像处理,生成与所述初始图像对应的道面标线完整度等级;
11.将所述行走速度信息和所述道面标线完整度等级发送给所述喷头输出压力控制
组件,以实现对清洗装置的清洗喷头输出压力的控制。
12.优选地,对所述初始图像进行图像处理,生成与所述初始图像对应的道面标线完整度等级,具体为:
13.对所述初始图像进行标定处理,生成能够将所述初始图像中的道路标线区域标定出来的分割图像;
14.对所述分割图像进行灰度化处理,生成灰度图像;
15.对所述灰度图像进行二值化处理,生成未去除标线的面积的目标图像;
16.对所述目标图像进行比较处理,生成与所述初始图像对应的道面标线完整度等级,其中,所述道面标线完整度等级为所述目标图像与所述灰度图像总面积的比值。
17.优选地,还包括喷头旋转控制组件,所述喷头旋转控制组件的控制端与所述工况机的控制端电气连接,所述喷头旋转控制组件的输出端用于与清洗装置的清洗喷头连接。
18.优选地,还包括:
19.对所述行走速度信息进行预处理,生成输入电压值;
20.根据所述输入电压值对所述喷头旋转控制组件的电压值进行控制,以实现对清洗装置的清洗喷头的旋转控制。
21.优选地,所述速度检测组件包括速度检测模块、霍尔传感器、以及第一控制器,所述速度检测模块的输出端与所述霍尔传感器的输入端电气连接,所述霍尔传感器的输出端与所述第一控制器的输入端电气连接,所述第一控制器的输出端与所述工况机的输入端电气连接;
22.其中,所述速度检测模块配置为获取清洗装置的行走速度。
23.优选地,所述标线检测模块为摄像头。
24.优选地,所述喷头输出压力控制组件包括模糊控制器、电机控制器、水箱、截止阀、增压泵、第一驱动电机、第一过滤器、第二驱动电机、高压泵、溢流阀、以及高压卸荷阀;
25.其中,所述模糊控制器的控制端与所述工况机的输出端电气连接,所述模糊控制器的输出端与所述电机控制器的控制端电气连接,所述电机控制器的输出端与所述第一驱动电机的控制端、所述第二驱动电机的控制端连接,所述第一驱动电机与所述增压泵同轴连接,所述增压泵进水口与所述截止阀连接,所述截止阀与所述水箱连接,所述增压泵出水口经过所述第一过滤器与所述高压泵进水口连接,所述高压泵与所述第二驱动电机同轴连接,所述高压泵出水口与所述溢流阀、所述高压卸荷阀的第一接口连接,所述溢流阀出口与所述水箱连接,所述高压泵出水口、所述高压卸荷阀的第二接口用于与清洗装置连接。
26.优选地,所述高压卸荷阀包括二位二通气控阀、以及二位四通电磁阀,所述二位二通气控阀的第一接口与所述高压泵出水口连接,所述二位二通气控阀的第二接口与所述水箱连接,所述二位二通气控阀的输入口与所述二位四通电磁阀的输出口连接,所述二位二通气控阀的输出口与所述二位四通电磁阀的输入口连接,所述二位四通电磁阀的第一接口用于与清洗装置连接。
27.优选地,所述喷头输出压力控制组件还包括压力表,所述压力表与所述高压泵出口连接。
28.优选地,所述喷头旋转控制组件包括气动马达、电气比例阀、第二过滤器、空气压缩机、以及第三驱动电机;
29.其中,所述第三驱动电机与所述空气压缩机同轴连接,所述空气压缩机出口通过所述第二过滤器与所述电气比例阀入口连接,所述电气比例阀的出口与所述气动马达连接,所述气动马达用于与与清洗装置连接。
30.本发明还提供了一种基于模糊控制的道路标线高压清洗装置,包括装置本体、以及如上任意一项所述的基于模糊控制的道路标线高压清洗系统,所述速度检测组件配置在所述装置本体的轮子上,所述标线检测模块配置在所述装置本体的前端部,所述喷头输出压力控制组件的输出端与所述装置本体的清洗喷头连接。
31.综上所述,本实施例提供的一种基于模糊控制的道路标线高压清洗系统及其清洗装置,所述基于模糊控制的道路标线高压清洗系统能够通过检测清洗装置的行走速度和路面标线的完整度等级并将其转换成信号输入模糊控制器,并通过模糊控制器根据输入的清洗机构行进速度和路面标线的完整度等级对高压泵的输出压力进行模糊控制,实现了在相应的速度和路面标线的完整度等级下高压射流发生系统输出射流压力和清洗盘旋转速度的合理控制。从而解决了现有技术中的高压水射流清洗装置存在由于采取的工作模式唯一,在面对需要降低车速或者是标线的完整度较低的情况时,不仅会产生不必要的能量损耗,还有可能会对道面产生不可逆的破坏的问题。
附图说明
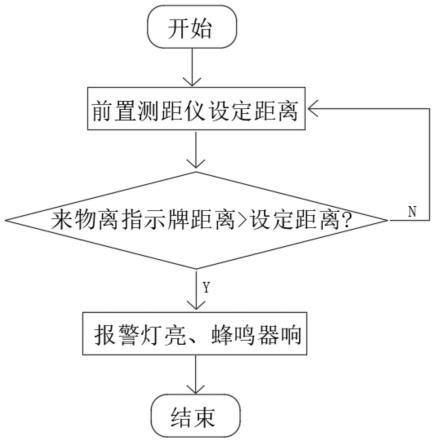
32.图1是本发明实施例提供的基于模糊控制的道路标线高压清洗系统的流程示意图。
33.图2是本发明第一方面提供的基于模糊控制的道路标线高压清洗系统的结构示意图。
34.图3是本发明第二方面提供的基于模糊控制的道路标线高压清洗系统的结构示意图。
35.图4是本发明实施例提供的基于模糊控制的道路标线高压清洗装置的结构示意图。
具体实施方式
36.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
37.以下结合附图对本发明的具体实施例做详细说明。
38.请参阅图1至图2,本发明第一实施例提供了一种基于模糊控制的道路标线高压清洗系统,包括工况机1、速度检测组件2、标线检测模块3、以及喷头输出压力控制组件4;
39.其中,所述速度检测组件2的控制端、所述标线检测模块3的控制端、所述喷头输出
压力控制组件4的控制端与所述工况机1的控制端电气连接,所述速度检测组件2的输出端与所述工况机1的输入端电气连接,所述工况机1的输出端与所述喷头输出压力控制组件4的输入端电气连接,所述喷头输出压力控制组件4的输出端用于与清洗装置的清洗喷头连接;
40.其中,所述工况机1被配置为通过执行其内部存储的计算机程序以实现如下步骤:
41.s101,接收所述速度检测组件2采集并进行放大处理的行走速度信息;
42.s102,接收所述标线检测模块3采集到的初始图像,并对所述初始图像进行图像处理,生成与所述初始图像对应的道面标线完整度等级;
43.具体地,步骤s102包括:对所述初始图像进行标定处理,生成能够将所述初始图像中的道路标线区域标定出来的分割图像;
44.对所述分割图像进行灰度化处理,生成灰度图像;
45.对所述灰度图像进行二值化处理,生成未去除标线的面积的目标图像;
46.对所述目标图像进行比较处理,生成与所述初始图像对应的道面标线完整度等级,其中,所述道面标线完整度等级为所述目标图像与所述灰度图像总面积的比值。
47.具体地,在本实施例中,当清洗装置上电后,所述标线检测模块3开始采集道面信息,并拍摄道面图像即所述初始图像,采用图像分割算法对所述初始图像进行处理,将所述初始图像中的道路标线区域标定出来,标定完成后,将已标定的图像进行灰度化处理,并将灰度处理后的图片进行二值化处理,以得到未去除标线的面积,该面积与总面积之比就是道面标线完好度等级分级依据,根据所述道面标线完整度等级即可解决道面表现的完整度检测问题。所述工况机1通过图像分割算法和目标检测算法处理图像输出标线完整度等级,提升了对道面标线完整度的检测速度。
48.s103,将所述行走速度信息和所述道面标线完整度等级发送给所述喷头输出压力控制组件4,以实现对清洗装置的清洗喷头输出压力的控制。
49.在本发明一个可能的实施例中,所述速度检测组件2包括速度检测模块21、霍尔传感器22、以及第一控制器23,所述速度检测模块21的输出端与所述霍尔传感器22的输入端电气连接,所述霍尔传感器22的输出端与所述第一控制器23的输入端电气连接,所述第一控制器23的输出端与所述工况机1的输入端电气连接;
50.其中,所述速度检测模块21配置为获取清洗装置的行走速度。
51.具体地,在本实施例中,所述速度检测模块21可以配置在清洗装置的后轮处,用于检测清洗装置的行走速度,所述霍尔传感器22将所述速度检测模块21采集到的速度信息进行放大处理,并发送给所述第一控制器23,即所述霍尔传感器22将该速度信息通过波形变换和整形处理后输入所述第一控制器23中,所述第一控制器23会将输入信号转换为速度数据,输入给所述工况机1。所述第一控制器23可以为单片机;需要说明的是,在其他实施例中,还可以采用其他类型的第一控制器,这里不做具体限定,但这些方案均在本发明的保护范围内。
52.在本发明一个可能的实施例中,所述标线检测模块3可以为摄像头。
53.具体地,在本实施例中,所述摄像头可以配置在清洗装置的前部,用于采集道面标线信息,且所述摄像头与道面形成一定的夹角,便于更好的对道面的标线进行采集。所述摄像头拍摄道面待清除标线图像信息,通过gige接口发送至所述工况机1中,由所述工况机1
将处理后得到的信号经can接口发送至模糊控制器;所述工况机1对图像的处理包括对所述图像中标线范围的分割、所述图像分割后图像灰度化,得到灰度图像、所述灰度图像二值化处理、计算黑白区域面积确定路面完整度等级。需要说明的是,在其他实施例中,还可以采用其他类型的标线检测模块,这里不做具体限定,但这些方案均在本发明的保护范围内。
54.请参阅图3,在本发明一个可能的实施例中,所述喷头输出压力控制组件4包括模糊控制器41、电机控制器42、水箱43、截止阀44、增压泵45、第一驱动电机46、第一过滤器47、第二驱动电机48、高压泵49、溢流阀410、以及高压卸荷阀;
55.其中,所述模糊控制器41的控制端与所述工况机1的输出端电气连接,所述模糊控制器41的输出端与所述电机控制器42的控制端电气连接,所述电机控制器42的输出端与所述第一驱动电机46的控制端、所述第二驱动电机48的控制端连接,所述第一驱动电机46与所述增压泵45同轴连接,所述增压泵45进水口与所述截止阀44连接,所述截止阀44与所述水箱43连接,所述增压泵45出水口经过所述第一过滤器47与所述高压泵49进水口连接,所述高压泵49与所述第二驱动电机48同轴连接,所述高压泵49出水口与所述溢流阀410、所述高压卸荷阀的第一接口连接,所述溢流阀410出口与所述水箱43连接,所述高压泵49出水口、所述高压卸荷阀的第二接口用于与清洗装置连接。
56.具体地,在本实施例中,所述模糊控制器41以速度和道面信息为输入量,对所述第二驱动电机48的转速和转矩进行模糊控制,其迷糊控制包括输入信号的迷糊化、输入信号隶属度的确定、输出信号模糊控制量的确定、反模糊化。所述模糊控制器41将输入的所述速度检测组件2检测的数据即所述行走速度信息、所述道面标线完整度等级、预设的清洗装置速度、预设的道面标线完整度等级进行模糊化处理,得到对应的清洗装置速度、道面标线完整度等级的模糊量和隶属度数值,此时,所述模糊控制器41会根据得到的糊量和隶属度数值在预设的模糊控制库内查找模糊控制量,查找出的模糊控制量经过去模糊化,最终生成驱动电机的转速以及转矩精准值。
57.在本实施例中,所述模糊控制器41会将驱动电机转速以及转矩信息发送给所述电机控制器41,所述电机控制器42会根据得到的驱动电机转速以及转矩信息对所述第二驱动电机48进行控制,由所述第二驱动电机48的电机转速和转矩控制清洗装置的压力输出大小;其中,由于所述电机控制器42对所述第二驱动电机48的精准控制,使得所述第二驱动电机48可更精准的控制所述高压泵49的输出压力。简单来说,清洗装置上摄像头和速度检测模块为该系统的信号输入部分,采集包括清洗速度信息和路面待去除标线信息,依据摄像头和速度检测模块采集信息实时向所述高压泵49的电机控制箱输出控制信号,控制所述高压泵49输出压力大小。需要说明的是,在其他实施例中,还可以采用其他类型的喷头输出压力控制组件,这里不做具体限定,但这些方案均在本发明的保护范围内。
58.在本实施例中,以道面标线的完整度等级的模糊论域为[0,1],模糊子集为{nb,ns,o,ps,pb},代表标线完整度为模糊,较模糊,中,较清晰,清晰为例:清洗装置在标线较模糊时速度最大可达到0.7m/s,确定清洗机构速度论域为[0,0.7]m/s,模子集为{nb,ns,o,ps,pb},代表车速为慢,较慢,中速,较快,快;驱动电机转速的论域为[950-1500]r/min,模糊子集为{nb,ns,o,ps,pb},代表电机转速为慢,较慢,中速,较快,快;驱动电机转矩的论域为[140-250]n*m,模糊子集为{nb,ns,o,ps,pb},代表电机的转矩大小为小,较小,中,较大,大。
[0059]
分别为道路标线完整度等级论域[0,1]设置期望值为0.5、清洗装置的速度论域[0,0.7]m/s设置控制期望值0.4m/s、电机转速论域[950-1500]r/min设置期望值1200r/min、电机转矩论域[140-250]n*m设置期望值170n*m,建立模糊量的隶属度函数,采用高斯隶属度函数和三角隶属度函数。
[0060]
由驱动电机连接负载泵,转矩、转速可用同模糊控制规则,标线完整度上升,去除难度增加,需要水流压力上升,电机转矩、转速增大。其中,模糊控制规则如下:
[0061]
1.if(v=nb)and(u=nb)then(n=t=nb)
[0062]
2.if(v=nb)and(u=ns)then(n=t=nb)
[0063]
3.if(v=nb)and(u=o)then(n=t=ns)
[0064]
4.if(v=nb)and(u=ps)then(n=t=ns)
[0065]
5.if(v=nb)and(u=pb)then(n=t=o)
[0066]
6.if(v=ns)and(u=nb)then(n=t=nb)
[0067]
7.if(v=ns)and(u=ns)then(n=t=ns)
[0068]
8.if(v=ns)and(u=o)then(n=t=ns)
[0069]
9.if(v=ns)and(u=ps)then(n=t=o)
[0070]
10.if(v=ns)and(u=pb)then(n=t=ps)
[0071]
11.if(v=o)and(u=nb)then(n=t=ns)
[0072]
12.if(v=o)and(u=ns)then(n=t=ns)
[0073]
13.if(v=o)and(u=o)then(n=t=o)
[0074]
14.if(v=o)and(u=ps)then(n=t=ps)
[0075]
15.if(v=o)and(u=pb)then(n=t=ps)
[0076]
16.if(v=ps)and(u=nb)then(n=t=ns)
[0077]
17.if(v=ps)and(u=ns)then(n=t=o)
[0078]
18.if(v=ps)and(u=o)then(n=t=ps)
[0079]
19.if(v=ps)and(u=ps)then(n=t=ps)
[0080]
20.if(v=ps)and(u=pb)then(n=t=pb)
[0081]
21.if(v=pb)and(u=nb)then(n=t=o)
[0082]
22.if(v=pb)and(u=ns)then(n=t=ps)
[0083]
23.if(v=pb)and(u=o)then(n=t=ps)
[0084]
24.if(v=pb)and(u=ps)then(n=t=pb)
[0085]
25.if(v=pb)and(u=pb)then(n=t=pb)
[0086]
其中,电机转速、转矩模糊控制有25条规则,驱动电机的模糊控制表,如表1所示:
[0087]
表1:
[0088][0089][0090]
模糊控制规则根据速度、道面标线完整度等级的模糊量和隶属度在已建立模糊控制表中查找模糊控制量,将查找出的模糊控制量经反模糊化后向电机控制器输出电机转速、转矩的精确值。
[0091]
在本发明一个可能的实施例中,所述高压卸荷阀包括二位二通气控阀411、以及二位四通电磁阀412,所述二位二通气控阀411的第一接口与所述高压泵49出水口连接,所述二位二通气控阀411的第二接口与所述水箱43连接,所述二位二通气控阀411的输入口与所述二位四通电磁阀412的输出口连接,所述二位二通气控阀411的输出口与所述二位四通电磁阀412的输入口连接,所述二位四通电磁阀412的第一接口用于与清洗装置连接。
[0092]
具体地,在本实施例中,当所述二位四通电磁阀412不通电时,所述二位二通气控阀411会关闭,所述高压泵49产生的高压射流会回到所述水箱43中;当所述二位四通电磁阀412通电时,所述二位二通气控阀411会打开,所述高压泵49产生的高压射流会进入清洗装置中。需要说明的是,在其他实施例中,还可以采用其他类型的高压卸荷阀,这里不做具体限定,但这些方案均在本发明的保护范围内。
[0093]
在本发明一个可能的实施例中,所述喷头输出压力控制组件4还包括压力表413,所述压力表413与所述高压泵49出口连接。
[0094]
具体地,在本实施例中,压力表是指以弹性元件为敏感元件,测量并指示高于环境压力的仪表,应用极为普遍,它几乎遍及所有的工业流程和科研领域。在热力管网、油气传输、供水供气系统、车辆维修保养厂店等领域随处可见。尤其在工业过程控制与技术测量过程中,由于机械式压力表的弹性敏感元件具有很高的机械强度以及生产方便等特性,使得机械式压力表得到越来越广泛的应用。在使用所述基于模糊控制的道路标线高压清洗系统时,所述高压泵49的内部压力显示在所述压力表413上,用户可根据所述压力表413显示的压力值,对所述高压泵49的压力进行调整;用户通过所述压力表413可以清楚的知道当前所述高压泵49的压力。
[0095]
请参阅图2,在本发明一个可能的实施例中,还包括喷头旋转控制组件5,所述喷头旋转控制组件5的控制端与所述工况机1的控制端电气连接,所述喷头旋转控制组件5的输出端用于与清洗装置的清洗喷头连接。
[0096]
在本发明一个可能的实施例中,还包括:
[0097]
对所述行走速度信息进行预处理,生成输入电压值;
[0098]
根据所述输入电压值对所述喷头旋转控制组件5的电压值进行控制,以实现对清洗装置的清洗喷头的旋转控制。
[0099]
请参阅图3,在本发明一个可能的实施例中,所述喷头旋转控制组件5包括气动马达51、电气比例阀52、第二过滤器53、空气压缩机54、以及第三驱动电机55;
[0100]
其中,所述第三驱动电机55与所述空气压缩机54同轴连接,所述空气压缩机54出口通过所述第二过滤器53与所述电气比例阀52入口连接,所述电气比例阀52的出口与所述气动马达51连接,所述气动马达51用于与与清洗装置连接。
[0101]
具体地,在本实施例中,所述工况机1依据所述行走速度信息控制旋转喷头的旋转;所述速度检测组件2会将采集到的清洗装置的行走速度信号输入所述工况机1中经常处理,所述工况机1会依据所述输入电压控制所述输入电气比例阀52的电压,即根据输入电压大小控制所述电气比例阀52的开度,高压气体经过所述电气比例阀52进入所述气动马达51,进而控制所述气动马达51的旋转速度,最终由所述气动马达51带动喷头旋转,同时保持高压射流清洗标线时始终与地面夹角30-40
°
。需要说明的是,在其他实施例中,还可以采用其他类型的喷头旋转控制组件,这里不做具体限定,但这些方案均在本发明的保护范围内。
[0102]
在本实施例中,所述基于模糊控制的道路标线高压清洗系统在清洗装置作业过程中,通过所述行走速度信息动态调整清洗装置旋转喷头的旋转速度,使高压射流能够以最佳角度冲击标线,有效提升了高压清洗装置的去除标线效果。
[0103]
综上,所述基于模糊控制的道路标线高压清洗系统能够通过检测清洗装置的行走速度和路面标线的完整度等级并将其转换成信号输入模糊控制器,并通过模糊控制器根据输入的清洗机构行进速度和路面标线的完整度等级对高压泵的输出压力进行模糊控制,即能够通过检测清洗装置的行走速度和路面标线的完整度等级来自动匹配清洗装置的合理运行功率,其可以根据道面标线完整度信息和清洗装置的行进速度实时的调节高压清洗装置的作业功率;实现了在相应的速度和路面标线的完整度等级下高压射流发生系统输出射流压力和清洗盘旋转速度的合理控制,因为清洗装置在作业过程中的功率完全由该系统进行控制,进而降低了清洗速度较低或待去除标线完整度较低时时依旧使用系统最高运行功率的不必要能量消耗,提升了设备的智能化程度,增加了高压清洗机构的作业时间。
[0104]
请参阅图4,本发明第二实施例提供了一种基于模糊控制的道路标线高压清洗装置,包括装置本体6、以及如上任意一项所述的基于模糊控制的道路标线高压清洗系统,所述速度检测组件2配置在所述装置本体6的轮子上,所述标线检测模块3配置在所述装置本体6的前端部,所述喷头输出压力控制组件4的输出端与所述装置本体6的清洗喷头连接。
[0105]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。