1.本实用新型涉及数控车床废料收集领域,具体而言,涉及一种数控车床自动接料机构。
背景技术:
2.数控车床是使用较为广泛的数控机床之一。数控车床可以对各种套类零部件进行车削加工。数控车床在车削加工套类微型零件时,车削切断后的套类微型零件到处乱飞,套类微型零件容易混入铁屑中难以被整理出,后期人工操作捡出清理难度较大。
技术实现要素:
3.为了弥补以上不足,本实用新型提供了一种数控车床自动接料机构,旨在改善车削切断后的套类微型零件到处乱飞,套类微型零件容易混入铁屑中难以被整理出,后期人工操作捡出清理难度较大的问题。
4.本实用新型是这样实现的:
5.本实用新型提供一种数控车床自动接料机构,包括移动支撑组件和卸料组件。
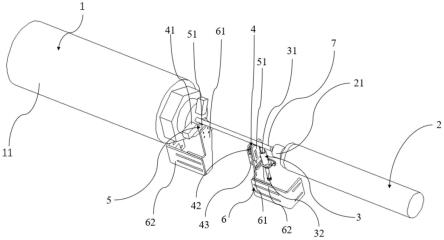
6.所述移动支撑组件包括燕尾拖板座和燕尾滑台,所述燕尾滑台滑动设置于所述燕尾拖板座上方;
7.所述卸料组件包括l型架板、承料盒、取料气缸、取料棒和卸料套件,所述l型架板固定设置于所述燕尾滑台顶部,所述取料气缸安装于所述l型架板后侧,且所述取料气缸输出端活动贯穿于所述l型架板,所述取料棒一端固定连接于所述取料气缸输出杆端,所述承料盒安装于所述燕尾拖板座远离所述取料气缸的缸筒一侧,所述承料盒靠近所述l型架板一侧开设有进料口,所述卸料套件安装于所述承料盒内部,且所述取料棒另一端活动贯穿于所述卸料套件。
8.在本实用新型的一种实施例中,所述卸料套件包括套管,所述套管固定设置于所述承料盒内部,且所述取料棒端部活动贯穿于所述套管。
9.在本实用新型的一种实施例中,所述套管靠近所述取料气缸一端安装有电磁铁。
10.在本实用新型的一种实施例中,所述套管靠近所述取料气缸一端开设有凹槽,所述电磁铁固定嵌设于凹槽内部。
11.在本实用新型的一种实施例中,所述承料盒顶部设置有盒盖。
12.在本实用新型的一种实施例中,所述盒盖顶部一侧设置有取料口。
13.本实用新型的有益效果是:本实用新型通过上述设计得到的一种数控车床自动接料机构,使用时,取料棒可以转且承接切断后的套类零件,取料气缸的前后动作可带动取料棒上切断后的套类零件通过进料口移动至承料盒内部,与卸料套件相接触完成退料。该接料机构能够减少人工捡料的劳动,也满足了机器连续作业的需要。
附图说明
14.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
15.图1是本实用新型实施方式提供的数控车床自动接料机构俯视结构示意图;
16.图2为本实用新型实施方式提供的数控车床自动接料机构主视结构示意图;
17.图3为本实用新型实施方式提供的卸料组件侧视结构示意图;
18.图4为本实用新型实施方式提供的卸料套件结构示意图。
19.图中:10-移动支撑组件;110-燕尾拖板座;120-燕尾滑台;20-卸料组件;210-l型架板;220-承料盒;221-进料口;222-取料口;230-取料气缸;240-取料棒;250-卸料套件;251-套管;252-电磁铁;260-盒盖。
具体实施方式
20.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
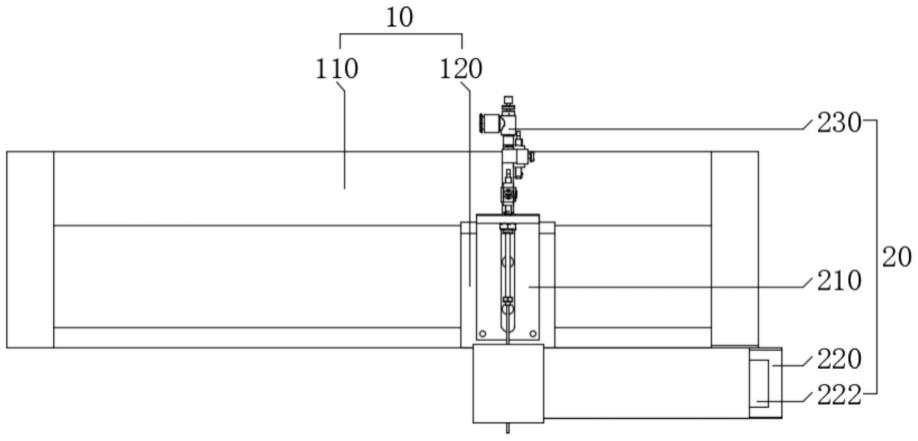
21.实施例
22.请参阅图1-图4,本实用新型提供一种数控车床自动接料机构,包括移动支撑组件10和卸料组件20。
23.其中,移动支撑组件10和卸料组件20相配合可以准确承接切断后的套类零件,完成接料和退料的过程,减少劳动强度。
24.请参阅图1、图2和图3,移动支撑组件10包括燕尾拖板座110和燕尾滑台120。燕尾滑台120滑动设置于燕尾拖板座110上方。卸料组件20包括l型架板210、承料盒220、取料气缸230、取料棒240和卸料套件250,l型架板210固定设置于燕尾滑台120顶部,取料气缸230安装于l型架板210后侧,且取料气缸230输出端活动贯穿于l型架板210,取料棒240一端固定连接于取料气缸230输出杆端,承料盒220安装于燕尾拖板座110远离取料气缸230的缸筒一侧,承料盒220靠近l型架板210一侧开设有进料口221,卸料套件250安装于承料盒220内部,且取料棒240另一端活动贯穿于卸料套件250。
25.在燕尾拖板座110和燕尾滑台120的配合下,燕尾滑台120可有外部驱动设备(未图示)推动,实现卸料组件20中的l型架板210、取料气缸230、取料棒240在燕尾拖板座110上移动。取料棒240可以转且承接切断后的套类零件,取料气缸230的前后动作可带动取料棒240上切断后的套类零件通过进料口221移动至承料盒220内部,与卸料套件250相接触完成退料。该接料机构能够减少人工捡料的劳动,也满足了机器连续作业的需要。
26.进一步地,请参阅图1和图3,承料盒220顶部设置有盒盖260。盒盖260顶部一侧设置有取料口222。卡打开盒盖260取出承料盒220内部收集的切断后的套类零件,也可从取料口222直接取出内部的套类零件。
27.在上述具体实施方式中,请参阅图4,卸料套件250包括套管251,套管251固定设置于承料盒220内部,且取料棒240端部活动贯穿于套管251。套管251靠近取料气缸230一端安装有电磁铁252。套管251靠近取料气缸230一端开设有凹槽,电磁铁252固定嵌设于凹槽内部。当取料棒240上的套类零件进入承料盒220内部与电磁铁252接触时,电磁铁252处于通电状态将取料棒240上的套类零件吸附;取料棒240移出承料盒220后,电磁铁252处于断电状态,套类零件落下。
28.需要说明的是,取料气缸230和电磁铁252具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。取料气缸230和电磁铁252的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。电磁铁252具体控制通断电均已是现有技术,本领域技术人员所熟知的,在此不再进行详细赘述。
29.该数控车床自动接料机构的工作原理:使用时,在燕尾拖板座110和燕尾滑台120的配合下,燕尾滑台120可有外部驱动设备(未图示)推动,实现卸料组件20中的l型架板210、取料气缸230、取料棒240在燕尾拖板座110上移动。取料棒240可以转且承接切断后的套类零件,取料气缸230的前后动作可带动取料棒240上切断后的套类零件通过进料口221移动至承料盒220内部,与卸料套件250相接触完成退料。该接料机构能够减少人工捡料的劳动,也满足了机器连续作业的需要。
30.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。