1.本发明属于钢管修磨技术领域,具体涉及一种可调整位姿的手动适应小口径钢管内壁的修磨机器人。
背景技术:
2.钢铁工业是自动化程度较高的流程工业之一。在各项工序中,实现自动化生产是提高产品质量、提高生产效率的手段。钢管广泛应用于建筑、医疗、军事武器、管道运输等重要领域,随着对钢管内壁的要求越来越高,对钢管内壁修磨设备及工艺的要求也逐渐提高。
3.目前,在工业钢管焊接过程中,可能会有焊接缺陷的产生,从而影响产品质量,对此必须要进行处理加工,否则将会降低产品使用效果甚至被判废。目前修磨钢管内壁设备为一种内孔膛磨机,加工不同孔径时需要更换对应尺寸的磨头,生产效率较低,生产成本较高;且内壁修磨装备的磨头一般为固定式,在对局部修磨时,无法准确定位修磨位置,打磨质量较低;对于长度较长,内径较小的钢管,现有修磨机床需要较大的占地空间,长轴进入钢管内修磨,在调整打磨位置时,只能通过移动小车移动打磨头前后来回打磨,使用寿命短,打磨质量较差。
技术实现要素:
4.本发明针对上述问题提供了一种可调整位姿的手动适应小口径钢管内壁的修磨机器人。
5.为达到上述目的本发明采用了以下技术方案:
6.一种可调整位姿的手动适应小口径钢管内壁的修磨机器人,包括被动调姿机构、辅助加工机构、修磨模块、自适应进给机构、照明灯、工业相机、工控机和电源;
7.所述被动调姿机构包括定平台、动平台一和动平台二,所述动平台一铰接在定平台内部,所述动平台二铰接在动平台一内部,且所述动平台一与定平台之间的铰接轴线和动平台二与动平台一之间的铰接轴线相互垂直;
8.所述辅助加工机构包括张紧模块、螺栓座、调节螺栓、调节螺母和张紧环,所述张紧模块有多个,均匀设置在定平台的外侧面上,所述螺栓座有两个对称设置在定平台的外侧面上,所述调节螺栓安装在螺栓座内,所述调节螺母螺纹连接在调节螺栓上,所述张紧环套设在调节螺栓上,其所述调节螺母位于张紧环与螺栓座之间,在所述张紧模块与张紧环之间连接有张紧绳,通过调节螺母调节张紧环与张紧模块之间的间距,达到调节张紧模块张开度的目的;
9.所述修磨模块包括砂轮、转轴、前端法兰、修磨电机、支撑杆和末端法兰,所述砂轮安装在转轴的一端,所述转轴的另一端穿过动平台二与修磨电机的输出轴连接,所述修磨电机通过前端法兰与定平台固定连接,所述末端法兰固定在修磨电机的末端,在所述前端法兰与末端法兰之间设置有多个支撑杆;
10.所述自适应进给机构包括关节电机一、法兰一、轮毂法兰、弹簧片、麦克纳姆轮分
支、法兰二、关节电机二、法兰三、电动推杆和位姿调节轮,所述关节电机一与末端法兰固定连接,所述法兰一与关节电机一的输出轴固定连接,所述轮毂法兰与法兰一固定连接,所述麦克纳姆轮分支有多个,均匀分布在轮毂法兰的外侧面上,在所述麦克纳姆轮分支与轮毂法兰之间设置有弹簧片,用于对麦克纳姆轮分支施加向外的作用力,所述法兰二与轮毂法兰固定连接,所述关节电机二固定在法兰二上,所述法兰三与关节电机二的输出轴固定连接,所述电动推杆固定安装在法兰三上,所述位姿调节轮安装在电动推杆的活动端;
11.所述照明灯有多个,均匀分布设置在张紧环的前表面,所述工业相机至少有两个,均匀分布设置在前端法兰的前表面,在所述张紧环上设置有用于为工业相机照相让位的避让槽,所述工业相机通过数据线与钢管外部的工控机连接,所述电源用于为机器人供电。
12.进一步,所述张紧模块包括来两两之间相互铰接的连杆一、连杆二、连杆三、连杆四、连杆五和连杆六,在所述连杆二与连杆三之间的铰接轴上以及连杆连杆五和连杆六之间的铰接轴上均设置有扭簧,用于对连杆二、连杆三、连杆五和连杆六施加缩紧的作用力,在所述连杆一和连杆四的后端均铰接有连杆七,两个连杆七的相近端通过张紧铰接轴铰接,在所述张紧铰接轴的两端均连接有张紧绳,所述张紧绳的另一端与张紧环连接,在所述连杆四上还开设有豁口,在所述豁口内设置有滚轮,所述滚轮安装在轮轴上,所述轮轴的两端分别安装在不同的轮悬挂上,所述轮悬挂固定安装在连杆四的下表面。
13.再进一步,还包括自动伸缩卷线器,所述自动伸缩卷线器用于对供电的电线和数据传输的数据线进行自动收放,在进行修磨时,自动伸缩卷线器断电,自适应进给机构拖动电线和数据线移动,修磨完毕后,进行退出时,给自动伸缩卷线器通电,自动伸缩卷线器对拖出的电线和数据线进行收线。
14.与现有技术相比本发明具有以下优点:
15.本发明通过手动旋转调节螺母调节辅助加工机构的张开度,从而适应不同内径的钢管,通过关节电机一驱动机器人在修磨管道内轴向进给;通过关节电机二调整电动推杆的角度,通过电动推杆的伸缩,配合被动调姿机构控制砂轮的倾斜度,从而实现对钢管内壁不同位置的修磨。
附图说明
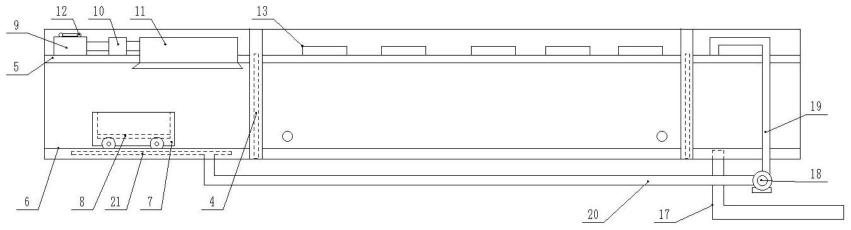
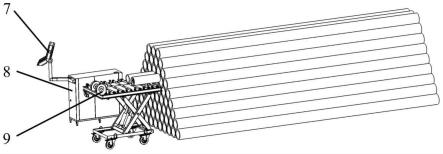
16.图1为本发明的使用示意图;
17.图2为本发明无工控机、电源和自动伸缩卷线器的结构示意图;
18.图3为本发明被动调姿机构的结构示意图;
19.图4为本发明被动调姿机构的剖视图;
20.图5为本发明辅助加工机构的结构示意图;
21.图6为本发明张紧模块的结构示意图;
22.图7为本发明张紧模块的剖视图;
23.图8为本发明修磨模块的结构示意图;
24.图9为本发明自适应进给机构的结构示意图;
25.图中,被动调姿机构—1、辅助加工机构—2、修磨模块—3、自适应进给机构—4、照明灯—5、工业相机—6、工控机—7、电源—8、自动伸缩卷线器—9、定平台—11、动平台一—12、动平台二—13、张紧模块—21、螺栓座—22、调节螺栓—23、调节螺母—24、张紧环—25、
张紧绳—26、避让槽—27、砂轮—31、转轴—32、前端法兰—33、修磨电机—34、支撑杆—35、末端法兰—36、关节电机一—40、法兰一—41、轮毂法兰—42、弹簧片—43、麦克纳姆轮分支—44、法兰二—45、关节电机二—46、法兰三—47、电动推杆—48、位姿调节轮—49、连杆一—2101、连杆二—2102、连杆三—2103、连杆四—2104、连杆五—2105、连杆六—2106、扭簧—2107、连杆七—2108、张紧铰接轴—2109、豁口—2110、滚轮—2111、轮轴—2112、轮悬挂—2113。
具体实施方式
26.为了进一步阐述本发明的技术方案,下面通过实施例对本发明进行进一步说明。
27.如图1至图9所示,一种可调整位姿的手动适应小口径钢管内壁的修磨机器人,包括被动调姿机构1、辅助加工机构2、修磨模块3、自适应进给机构4、照明灯5、工业相机6、工控机7、电源8和自动伸缩卷线器9;
28.所述被动调姿机构1包括定平台11、动平台一12和动平台二13,所述动平台一12铰接在定平台11内部,所述动平台二13铰接在动平台一12内部,且所述动平台一12与定平台11之间的铰接轴线和动平台二13与动平台一12之间的铰接轴线相互垂直;
29.所述辅助加工机构2包括张紧模块21、螺栓座22、调节螺栓23、调节螺母24和张紧环25,所述张紧模块21有多个,均匀设置在定平台11的外侧面上,所述螺栓座22有两个对称设置在定平台11的外侧面上,所述调节螺栓23安装在螺栓座22内,所述调节螺母24螺纹连接在调节螺栓23上,所述张紧环25套设在调节螺栓23上,其所述调节螺母24位于张紧环25与螺栓座22之间,在所述张紧模块21与张紧环25之间连接有张紧绳26,通过调节螺母24调节张紧环25与张紧模块21之间的间距,达到调节张紧模块21张开度的目的;
30.所述张紧模块21包括来两两之间相互铰接的连杆一2101、连杆二2102、连杆三2103、连杆四2104、连杆五2105和连杆六2106,在所述连杆二2102与连杆三2103之间的铰接轴上以及连杆连杆五2105和连杆六2106之间的铰接轴上均设置有扭簧2107,用于对连杆二2102、连杆三2103、连杆五2105和连杆六2106施加缩紧的作用力,在所述连杆一2101和连杆四2104的后端均铰接有连杆七2108,两个连杆七2108的相近端通过张紧铰接轴2109铰接,在所述张紧铰接轴2109的两端均连接有张紧绳26,所述张紧绳26的另一端与张紧环25连接,在所述连杆四2104上还开设有豁口2110,在所述豁口2110内设置有滚轮2111,所述滚轮2111安装在轮轴2112上,所述轮轴2112的两端分别安装在不同的轮悬挂2113上,所述轮悬挂2113固定安装在连杆四2104的下表面;
31.所述修磨模块3包括砂轮31、转轴32、前端法兰33、修磨电机34、支撑杆35和末端法兰36,所述砂轮31安装在转轴32的一端,所述转轴32的另一端穿过动平台二13与修磨电机34的输出轴连接,所述修磨电机34通过前端法兰33与定平台11固定连接,所述末端法兰36固定在修磨电机34的末端,在所述前端法兰33与末端法兰36之间设置有多个支撑杆35;
32.所述自适应进给机构4包括关节电机一40、法兰一41、轮毂法兰42、弹簧片43、麦克纳姆轮分支44、法兰二45、关节电机二46、法兰三47、电动推杆48和位姿调节轮49,所述关节电机一40与末端法兰36固定连接,所述法兰一41与关节电机一40的输出轴固定连接,所述轮毂法兰42与法兰一41固定连接,所述麦克纳姆轮分支44有多个,均匀分布在轮毂法兰42的外侧面上,在所述麦克纳姆轮分支44与轮毂法兰42之间设置有弹簧片43,用于对麦克纳
姆轮分支44施加向外的作用力,所述法兰二45与轮毂法兰42固定连接,所述关节电机二46固定在法兰二45上,所述法兰三47与关节电机二46的输出轴固定连接,所述电动推杆48固定安装在法兰三47上,所述位姿调节轮49安装在电动推杆48的活动端;
33.所述照明灯5有多个,均匀分布设置在张紧环25的前表面,所述工业相机6至少有两个,均匀分布设置在前端法兰33的前表面,在所述张紧环25上设置有用于为工业相机6照相让位的避让槽27,所述工业相机6通过数据线与钢管外部的工控机7连接,所述电源8用于为机器人供电,所述自动伸缩卷线器9用于对供电的电线和数据传输的数据线进行自动收放,在进行修磨时,自动伸缩卷线器9断电,自适应进给机构4拖动电线和数据线移动,修磨完毕后,进行退出时,给自动伸缩卷线器9通电,自动伸缩卷线器9对拖出的电线和数据线进行收线。
34.以上显示和描述了本发明的主要特征和优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
35.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。