技术特征:
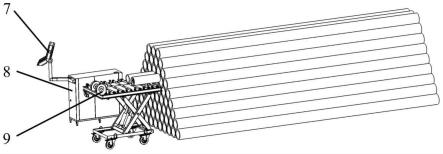
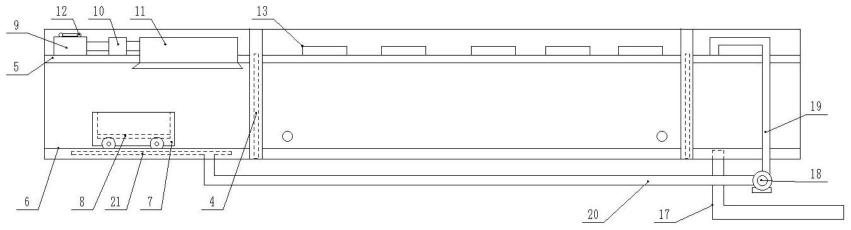
1.一种可调整位姿的手动适应小口径钢管内壁的修磨机器人,其特征在于:包括被动调姿机构(1)、辅助加工机构(2)、修磨模块(3)、自适应进给机构(4)、照明灯(5)、工业相机(6)、工控机(7)和电源(8);所述被动调姿机构(1)包括定平台(11)、动平台一(12)和动平台二(13),所述动平台一(12)铰接在定平台(11)内部,所述动平台二(13)铰接在动平台一(12)内部,且所述动平台一(12)与定平台(11)之间的铰接轴线和动平台二(13)与动平台一(12)之间的铰接轴线相互垂直;所述辅助加工机构(2)包括张紧模块(21)、螺栓座(22)、调节螺栓(23)、调节螺母(24)和张紧环(25),所述张紧模块(21)有多个,均匀设置在定平台(11)的外侧面上,所述螺栓座(22)有两个对称设置在定平台(11)的外侧面上,所述调节螺栓(23)安装在螺栓座(22)内,所述调节螺母(24)螺纹连接在调节螺栓(23)上,所述张紧环(25)套设在调节螺栓(23)上,其所述调节螺母(24)位于张紧环(25)与螺栓座(22)之间,在所述张紧模块(21)与张紧环(25)之间连接有张紧绳(26),通过调节螺母(24)调节张紧环(25)与张紧模块(21)之间的间距,达到调节张紧模块(21)张开度的目的;所述修磨模块(3)包括砂轮(31)、转轴(32)、前端法兰(33)、修磨电机(34)、支撑杆(35)和末端法兰(36),所述砂轮(31)安装在转轴(32)的一端,所述转轴(32)的另一端穿过动平台二(13)与修磨电机(34)的输出轴连接,所述修磨电机(34)通过前端法兰(33)与定平台(11)固定连接,所述末端法兰(36)固定在修磨电机(34)的末端,在所述前端法兰(33)与末端法兰(36)之间设置有多个支撑杆(35);所述自适应进给机构(4)包括关节电机一(40)、法兰一(41)、轮毂法兰(42)、弹簧片(43)、麦克纳姆轮分支(44)、法兰二(45)、关节电机二(46)、法兰三(47)、电动推杆(48)和位姿调节轮(49),所述关节电机一(40)与末端法兰(36)固定连接,所述法兰一(41)与关节电机一(40)的输出轴固定连接,所述轮毂法兰(42)与法兰一(41)固定连接,所述麦克纳姆轮分支(44)有多个,均匀分布在轮毂法兰(42)的外侧面上,在所述麦克纳姆轮分支(44)与轮毂法兰(42)之间设置有弹簧片(43),用于对麦克纳姆轮分支(44)施加向外的作用力,所述法兰二(45)与轮毂法兰(42)固定连接,所述关节电机二(46)固定在法兰二(45)上,所述法兰三(47)与关节电机二(46)的输出轴固定连接,所述电动推杆(48)固定安装在法兰三(47)上,所述位姿调节轮(49)安装在电动推杆(48)的活动端;所述照明灯(5)有多个,均匀分布设置在张紧环(25)的前表面,所述工业相机(6)至少有两个,均匀分布设置在前端法兰(33)的前表面,在所述张紧环(25)上设置有用于为工业相机(6)照相让位的避让槽(27),所述工业相机(6)通过数据线与钢管外部的工控机(7)连接,所述电源(8)用于为机器人供电。2.根据权利要求1所述的一种可调整位姿的手动适应小口径钢管内壁的修磨机器人,其特征在于:所述张紧模块(21)包括来两两之间相互铰接的连杆一(2101)、连杆二(2102)、连杆三(2103)、连杆四(2104)、连杆五(2105)和连杆六(2106),在所述连杆二(2102)与连杆三(2103)之间的铰接轴上以及连杆连杆五(2105)和连杆六(2106)之间的铰接轴上均设置有扭簧(2107),用于对连杆二(2102)、连杆三(2103)、连杆五(2105)和连杆六(2106)施加缩紧的作用力,在所述连杆一(2101)和连杆四(2104)的后端均铰接有连杆七(2108),两个连杆七(2108)的相近端通过张紧铰接轴(2109)铰接,在所述张紧铰接轴(2109)的两端均连接
有张紧绳(26),所述张紧绳(26)的另一端与张紧环(25)连接,在所述连杆四(2104)上还开设有豁口(2110),在所述豁口(2110)内设置有滚轮(2111),所述滚轮(2111)安装在轮轴(2112)上,所述轮轴(2112)的两端分别安装在不同的轮悬挂(2113)上,所述轮悬挂(2113)固定安装在连杆四(2104)的下表面。3.根据权利要求1所述的一种可调整位姿的手动适应小口径钢管内壁的修磨机器人,其特征在于:还包括自动伸缩卷线器(9),所述自动伸缩卷线器(9)用于对供电的电线和数据传输的数据线进行自动收放。
技术总结
本发明属于钢管修磨技术领域,具体涉及一种可调整位姿的手动适应小口径钢管内壁的修磨机器人,包括被动调姿机构、辅助加工机构、修磨模块、自适应进给机构、照明灯、工业相机、工控机和电源;辅助加工机构包括张紧模块、螺栓座、调节螺栓、调节螺母和张紧环,所述张紧模块有多个,均匀设置在定平台的外侧面上,所述螺栓座有两个对称设置在定平台的外侧面上,所述调节螺栓安装在螺栓座内,所述调节螺母螺纹连接在调节螺栓上,所述张紧环套设在调节螺栓上,其所述调节螺母位于张紧环与螺栓座之间,在所述张紧模块与张紧环之间连接有张紧绳,本发明通过手动旋转调节螺母调节辅助加工机构的张开度,从而适应不同内径的钢管。从而适应不同内径的钢管。从而适应不同内径的钢管。
技术研发人员:张金柱 郭奇宙 王涛 祁应福 孟家豪
受保护的技术使用者:太原理工大学
技术研发日:2022.09.30
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。