自动化样本处理系统和方法
1.相关申请的交叉引用
2.本技术要求于2020年3月11日提交的美国临时申请第62/988,171号的申请日的权益,其公开内容通过引用并入本文。
技术领域
3.本技术的方面涉及用于处理物体(例如培养板或培养皿)的自动化系统和方法。
背景技术:
4.生物样品(例如体液(如血液、尿液等)水样、食物样品、土壤样品等)经常被测试用于微生物(如细菌、真菌等)的存在或不存在。此类测试通常需要样品与营养培养基组合,以在样品中培养足够量的微生物的生长,从而允许可靠的检测。从历史上看,测试样品中微生物生长的证据一直是手动的过程。实验室技术人员将制备培养板,用样品接种它们,将接种的板放入培养箱中,并定期检查培养板中细菌菌落的生长。当有微生物生长的证据时,实验室技术人员将手动挑选菌落的一部分以用于进一步分析。为了制备挑选的菌落以用于进一步分析,实验室技术人员通常将挑选的菌落与溶液组合以产生用于下游测试的悬浮液。这种下游测试用于确定例如微生物的类型和/或微生物的抗生素敏感性和抗性。这些过程步骤也经常手动完成,需要大量技术人员在大型实验室中以高通量制备此类样品。
5.因此,已开发出自动化样本处理系统(例如becton、dickinson和company’sbd kiestra
tm
全实验室自动化(tla)系统)以提高临床微生物实验室的效率。目前,bd kiestra tla系统具有几个不同的模块,例如sortera(用于培养基存储和分配的模块)、barcoda(用于培养板条形码的模块)、inoqula
tm
(用于初始样本处理和接种的模块)、readacompact(用于样本培养和成像的模块)和ergonomica(工作台)。所有这些模块都通过双向proceeda输送系统链接在一起。这些模块的数量可以适应临床实验室的要求,以提供完整的实验室自动化解决方案。susan m.novak&elizabeth m.marlowe,automation in the clinical microbiology laboratory,33clinics in laboratory medicine 567(2013)和a.croxatto等人,laboratory automation in clinical bacteriology:what system to choose?,22clinical microbiology and infection 217(2016)中描述了自动化样本处理系统的附加示例,两者均通过引用并入本文。
6.在这些类型的自动化系统中,用于处理培养板的两个重复操作是堆垛和卸垛。例如,可以将培养板递送到一个或多个输出堆垛,并由实验室技术人员手动拾取以用于后续工作。在bd kiestra tla系统中,可在sortera、reada compact和ergonomica模块中找到堆垛机和卸垛机。
7.在许多自动化样本处理系统中,气动致动器用于堆垛和卸垛。然而,此类系统需要空气压缩机,空气压缩机购买、运行和维护成本可能很高。此外,能够向一个或多个自动化样本处理系统提供足够量的压缩空气的空气压缩机可能会非常吵闹。因此,需要能够在不使用压缩空气的情况下可靠地堆垛和卸垛培养板堆垛机和卸垛机。
技术实现要素:
8.本公开描述了用于处理物体(例如培养板或培养皿)的自动化系统和方法。例如,在一个实施例中,本公开描述了包括夹持机构、升降垫、一对销和机柜的自动化堆垛机和卸垛机。培养板堆垛可以被存储在机柜中。在堆垛操作期间,可以提升该对销以停止培养板沿输送轨道行进。一旦停止,培养板可以通过升降垫提升到输送轨道上方并被夹持机构夹持。在卸垛操作期间,可以打开夹持机构,并且可以通过升降垫将培养板降低到输送轨道上。有利地,在一些实施例中,本文所述的自动化堆垛机和卸垛机可以用一个或多个电动致动器来实施,电动致动器比气动致动器在购买、运行和维护方面可能更便宜。此外,一个或多个电动致动器还可以产生比气动致动器更小的噪音。
9.本公开的一个方面涉及一种自动化堆垛机和卸垛机,该自动化堆垛机和卸垛机包括升降垫、包括两个或多个夹具的夹持机构、以及用于控制升降垫和夹持机构的一个或多个处理器。一个或多个处理器被配置为控制升降垫和夹持机构以通过以下方式堆垛第一培养板:将升降垫连同搁置在升降垫顶部的第一培养板一起提升,直到第一培养板的盖子的顶面触及或靠近第一堆培养板的底部处的第二培养板的底座的底面,打开夹持机构,进一步将升降垫连同第一培养板和支撑在第一培养板上的第一堆培养板一起提升,并闭合夹持机构,使得两个或多个夹具接触第一培养板的底座。一个或多个处理器还被配置为控制升降垫和夹持机构以通过以下方式卸垛第三培养板:提升升降垫直到升降垫的顶面触及或靠近第三培养板的底座的底面,打开夹持机构,将升降垫连同第三培养板和支撑在第三培养板上的第二堆培养板一起降低,闭合夹持机构,使得两个或多个夹具接触在第二堆培养板内并且搁置在第三培养板的盖子顶部的第四培养板的底座,并进一步降低升降垫以将第三培养板与第二堆培养板分开。
10.在一些实施例中,夹持机构在其闭合后施加到第一培养板和第四培养板的力小到足以准许第一培养板和第四培养板向下滑动直到第一培养板的盖子和第四培养板的盖子接触两个或多个夹具。在一些实施例中,夹持机构的两个或多个夹具中的每一个包括相对于彼此以80度和160度之间的角度定位的两个边缘,并且其中边缘中的每一个在不同的接触点处接触第一培养板和第四培养板的底座。
11.在一些实施例中,自动化堆垛机和卸垛机被并入自动化样本处理系统中,该自动化样本处理系统还包括输送系统,该输送系统包括轨道,该轨道被配置为将培养板运送到自动化堆垛机和卸垛机以及从自动化堆垛机和卸垛机运送培养板。在此类实施例中,进一步降低升降垫以将第三培养板与第二堆培养板分开包括将升降垫降低到轨道下面的位置并因此将第三培养板放置在轨道上。在一些实施例中,升降垫包括护罩,该护罩被配置为在升降垫被提升到轨道上方时停止其他培养板沿轨道行进。
12.在一些实施例中,自动化堆垛机和卸垛机与包括一个或多个销的止动机构协作通信。在这样的实施例中,自动化堆垛机和卸垛机的一个或多个处理器还被配置为通过将一个或多个销提升到轨道上方以停止第一培养板在升降垫上方的位置处继续沿轨道行进来控制一个或多个销以用于堆垛第一培养板。在此类实施例中,自动化堆垛机和卸垛机的一个或多个处理器还被配置为通过将一个或多个销降低到轨道下方以准许第三培养板沿轨道行进来控制一个或多个销以用于卸垛第三培养板。在一些实施例中,至少一个马达被耦接到一个或多个销和升降垫,使得一个或多个处理器能够通过控制至少一个马达来控制一
个或多个销和升降垫。在一些实施例中,当停止第一培养板继续沿轨道行进时,一个或多个销接触第一培养板的底座,但不接触第一培养板的盖子。
13.在一些实施例中,自动化堆垛机和卸垛机与包括至少一个挡板(flipper)的挡板止动器协作通信,该至少一个挡板具有由弯曲部分开的两个或多个边缘。在这样的实施例中,自动化堆垛机和卸垛机的一个或多个处理器还被配置为通过旋转至少一个挡板以在第一培养板在升降垫上方的位置处沿轨道行进时停止第一培养板来控制挡板止动器以用于堆垛第一培养板。在此类实施例中,自动化堆垛机和卸垛机的一个或多个处理器进一步被配置为通过旋转至少一个挡板以准许第三培养板沿轨道行进来控制挡板止动器以用于卸垛第三培养板。在一些实施例中,当一对致动器向挡板的不同部分施加相反的力时,至少一个挡板由该对致动器旋转。在一些实施例中,至少一个挡板由动磁致动器旋转。在一些实施例中,至少一个挡板被耦接到设置在狭槽中的轴,该狭槽限定在外壳或引导结构中。
14.本公开的另一方面涉及一种方法,该方法包括:将第一培养板定位在培养板堆垛下面和升降垫上方,将升降垫连同搁置在升降垫顶部的第一培养板一起提升,直到第一培养板的盖子的顶面触及或靠近培养板堆垛的底部处的第二培养板的底座的底面,打开夹持机构,进一步将升降垫连同第一培养板和支撑在第一培养板上的培养板堆垛一起提升,并闭合夹持机构,使得夹持机构的两个或多个夹具接触第一培养板的底座。
15.在一些实施例中,夹持机构在其闭合后施加到第一培养板和第四培养板的力小到足以准许第一培养板向下滑动直到第一培养板的盖子接触两个或多个夹具。
16.在一些实施例中,该方法进一步包括:提升升降垫直到升降垫的顶面触及或靠近第三培养板的底座的底面,第二次打开夹持机构,将升降垫连同第三培养板和支撑在第三培养板上的第二堆培养板一起降低,闭合夹持机构,使得两个或多个夹具接触在第二堆培养板内的第四培养板的底座,其中第四培养板搁置在第三培养板的盖子顶部,并进一步降低升降垫以将第三培养板与第二堆培养板分开。
17.本公开的又一方面涉及一种方法,该方法包括:提升升降垫直到升降垫的顶面触及或靠近培养板堆垛的底部处的第一培养板的底部的底面,打开夹持机构,将升降垫连同第一培养板和支撑在第一培养板上的培养板堆垛一起降低,闭合夹持机构,使得两个或多个夹具接触培养板堆垛内的第二培养板的底座,其中第二培养板搁置在第一培养板的盖子顶部,并且进一步降低升降垫以将第一培养板与培养板堆垛分开。
18.本公开的又一方面涉及一种止动机构,该止动机构包括一个或多个销和用于控制一个或多个销的一个或多个处理器,其中一个或多个处理器被配置为将一个或多个销提升到输送系统的轨道上方以停止物体继续沿轨道行进,以及将一个或多个销降低到轨道下方以准许物体沿轨道行进。
19.本公开的又一方面涉及一种止动机构,该止动机构包括与销铰链接合的平台和用于控制该平台的一个或多个处理器,其中一个或多个处理器被配置为使平台围绕销在第一方向上旋转以停止物体继续沿输送系统的轨道行进,并且使平台围绕销在与第一方向相反的第二方向上旋转以准许物体沿轨道行进。
20.本公开的又一方面涉及一种止动机构,该止动机构包括至少一个挡板和用于控制该至少一个挡板的一个或多个处理器,该至少一个挡板具有由弯曲部分开的两个或多个边缘,其中一个或多个处理器被配置为在第一方向上旋转至少一个挡板以停止物体继续沿输
送系统的轨道行进,并且在与第一方向相反的第二方向上旋转至少一个挡板以准许物体沿轨道行进。
21.本公开的又一方面涉及一种传送机构,该传送机构包括具有第一端和第二端的臂、定位在臂的第一端处的枢轴接头、定位在臂的第二端处的柱,以及用于控制臂的一个或多个处理器,其中一个或多个处理器被配置为使臂围绕枢轴接头在第一方向上旋转,以用柱停止物体继续沿输送系统的第一轨道行进,并使臂围绕枢轴接头在与第一方向相反的第二方向上旋转,以用柱将物体从第一轨道推到输送系统的第二轨道。
附图说明
22.图1(a)和图1(b)示出了可以集成到自动化样本处理系统中的两个不同模块。
23.图2(a)-图2(g)示出了可以集成到自动化样本处理系统中的输送系统。更具体地,图2(a)-图2(c)示出了输送系统的不同侧视图。图2(d)示出了输送系统的俯视图。图2(e)-图2(g)示出了输送系统的不同横截面。
24.图3(a)和图3(b)分别示出了用于存储培养板堆垛的机柜以及可以集成到自动化样本处理系统中的自动化堆垛机和卸垛机的侧视图和横截面。
25.图4示出了图3(b)的自动化堆垛机和卸垛机的夹持机构如何可以被配置为接触培养板堆垛内的培养板。
26.图5(a)和图5(b)示出了图3(b)的自动化堆垛机和卸垛机的夹持机构的不同俯视图。
27.图6(a)和图6(b)示出了图3(b)的自动化堆垛机和卸垛机的夹持机构如何板可以被配置为支撑培养板堆垛。
28.图7是培养板边沿的照片。
29.图8(a)和图8(b)分别示出了图3(b)的自动化堆垛机和卸垛机的销如何可以被配置为接触输送轨道上的培养板的侧视图和顶视图。
30.图9示出了图3(b)的自动化堆垛机和卸垛机的侧视图。
31.图10示出了图3(b)的自动化堆垛机和卸垛机的侧视图。
32.图11(a)-图11(f)示出了可以集成到自动化样本处理系统中的自动化堆垛机和卸垛机。更具体地,图11(a)示出了自动化堆垛机和卸垛机的侧视图。图11(b)示出了自动化堆垛机和卸垛机的升降机构的侧视图。图11(c)示出了自动化堆垛机和卸垛机的夹持机构的侧视图。图11(d)示出了自动化堆垛机和卸垛机的线性致动器的侧视图。图11(e)示出了自动化堆垛机和卸垛机的一对销的侧视图。图11(f)示出了当升降机构被提升时自动化堆垛机和卸垛机的横截面。
33.图12示出了可以集成到自动化样本处理系统中的自动化堆垛机和卸垛机的控制电路的示意图。
34.图13示出了可以由可以集成到自动化样本处理系统中的自动化堆垛机和卸垛机执行的堆垛方法。
35.图14(a)-图14(h)示出了已集成到自动化样本处理系统中的自动化堆垛机和卸垛机的不同潜在状态。
36.图15示出了可以由可以集成到自动化样本处理系统中的自动化堆垛机和卸垛机
执行的卸垛方法。
37.图16(a)-图16(h)示出了已集成到自动化样本处理系统中的自动化堆垛机和卸垛机的不同潜在状态。
38.图17(a)-图17(k)示出了可以集成到自动化样本处理系统中的自动化堆垛机和卸垛机。更具体地,图11(a)示出了与输送系统集成的自动化堆垛机和卸垛机的侧视图。图11(b)示出了自动化堆垛机和卸垛机的侧视图。图17(c)和图17(d)示出了自动化堆垛机和卸垛机的夹持机构的不同侧视图。图17(e)和图17(f)示出了自动化堆垛机和卸垛机的升降机构的不同侧视图。图17(g)和图17(h)示出了自动化堆垛机和卸垛机的一对销的不同侧视图。图17(i)-图17(k)示出了自动化堆垛机和卸垛机的升降机构和所述一对销的不同潜在状态。
39.图18(a)-图18(q)示出了可以集成到自动化样本处理系统中的不同止动机构。更具体地,图18(a)-图18(d)和图18(e)示出了第一止动机构。图18(a)示出了第一止动机构的侧视图。图18(b)示出了第一止动机构的俯视图。图18(c)和图18(e)示出了第一止动机构的不同横截面。图18(d)和图18(f)示出了第二止动机构的不同横截面。图18(g)和图18(h)示出了第三止动机构的不同横截面。图18(i)和图18(j)示出了第四止动机构的不同横截面。图18(k)和图18(l)示出了第五止动机构的不同横截面。图18(m)和图18(n)示出了第六止动机构的不同横截面。图18(o)示出了第七止动机构的横截面。图18(p)示出了第八止动机构的横截面。图18(q)示出了第九止动机构的俯视图。
40.图19(a)-图19(e)示出了可以集成到自动化样本处理系统中的止动机构。更具体地,图19(a)-图19(d)示出了止动机构的不同横截面。图19(e)示出了止动机构的俯视图。
41.图20(a)和图20(b)分别示出了可以集成到自动化样本处理系统中的止动机构的俯视图和横截面。
42.图21示出了可以集成到自动化样本处理系统中的挡板止动器。
43.图22(a)-图22(c)示出了可以集成到自动化样本处理系统中的挡板止动器的不同侧视图。在图22(b)和图22(c)中,挡板止动器的外壳的一部分已经被移除。
44.图23(a)-图23(c)示出了可以集成到自动化样本处理系统中的挡板止动器。更具体地,图23(a)示出了与输送系统集成的挡板止动器的侧视图。图23(b)示出了挡板止动器的侧视图,其中没有挡板止动器的外壳的一部分。图23(c)示出了没有外壳的挡板止动器的侧视图。
45.图24示出了可以集成到自动化堆垛机和卸垛机中的夹持机构。
46.图25示出了具有闸门止动器和多个自动化堆垛机和卸垛机的自动化样本处理系统。
47.图26(a)和图26(b)分别示出了用于存储培养板堆垛的机柜以及可以集成到自动化样本处理系统中的自动化堆垛机和卸垛机的侧视图和横截面。
48.图27示出了可以集成到自动化样本处理系统中的输送系统。
49.图28(a)-图28(f)示出了可以集成到自动化样本处理系统中的不同模块。更具体地,图28(a)示出了双向公路(highway)模块。图28(b)示出了带有自动化输出堆垛机的图28(a)的双向公路模块。图28(c)示出了带有自动化堆垛机和卸垛机的图28(a)的双向公路模块。图28(d)示出了单向公路模块。图28(e)示出了90度转弯模块、t形交叉模块和180度转弯
模块。图28(f)示出了捷径模块。
具体实施方式
50.参考附图详细描述了本公开的实施例,其中相似的附图标记表示相似或相同的元件。许多附图是按比例绘制的。在这种情况下,以毫米为单位提供测量值。然而,应当理解,所公开的实施例仅仅是本公开的示例,其可以以各种形式体现。没有详细描述众所周知的功能或构造以避免不必要的细节混淆本公开。因此,本文公开的具体结构和功能细节不应被解释为限制性的,而仅仅是作为权利要求的基础和作为教导本领域技术人员以几乎任何适当详细的结构不同地采用本公开的代表性基础。
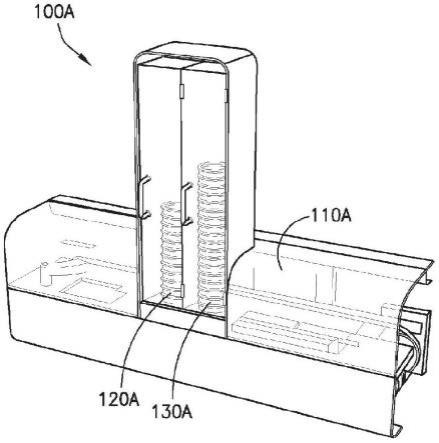
51.图1(a)示出了可以集成到自动化样本处理系统(例如,bd kiestra tla系统)中的模块100a。如图所示,模块100a包括输送系统110a和机柜120a和130a。机柜120a和130a可以各自包含培养板堆垛。此外,自动化堆垛机和卸垛机可被定位在培养板堆垛之下的机柜120a和130a下面。在其他实施例中,机柜和/或自动化堆垛机和卸垛机的数量可以变化。例如,如图1(b)所示,模块100b可以包括四个单独的机柜,用于容纳培养板堆垛。此外,单独的堆垛机和卸垛机可以被定位在这些机柜中的每一个下面。如图所示,模块100b包括输送系统110b和机柜120b、130b、140b和150b。在一些实施例中,自动化样本处理系统可以包括多个模块(例如,模块100a或100b)。例如,在一些实施例中,模块100a和100b可以相邻定位,使得培养板可以离开模块100a并立即进入模块100b。
52.图2(a)-图2(g)示出了输送系统200的各种视图,该输送系统200例如可以集成到图1(a)-图1(b)的模块100a和100b中。更具体地,图2(a)-图2(c)示出了输送系统200的三维渲染图,并且图2(d)-图2(g)是按比例绘制的图,包括以毫米为单位的测量值。在其他实施例中,可以修改输送系统200的尺寸。如图所示,输送系统200包括顶盖202、底盖204、载物台206、主轨道210、侧轨道220、梁232、梁234、梁236、止动机构242、止动机构244、止动机构246、出口匝道捕获器252、入口匝道捕获器254、扫描仪262和扫描仪驱动器264。主轨道210包括传送带212和214。侧轨道220包括传送带222和224。在图2(a)-图2(g)中的一些中,未示出顶盖202和/或底盖204,以便可以更清楚地看到输送系统200的其他方面。
53.在操作期间,培养板可以沿主轨道210和/或侧轨道220横穿载物台206。培养板可以在主轨道210上进入和离开输送系统200。当培养板沿主轨道210行进时,它可以由止动机构242、244和/或246停止。此外,当培养板进入输送系统200时,它可以由扫描仪驱动器264旋转,使得培养板上的条形码面对扫描仪262。然后,扫描仪262可以扫描条形码。自动化样本处理系统可以使用条形码信息来跟踪正在被处理的培养板的位置。在培养板已被扫描之后,它可以通过出口匝道捕获器252传送到侧轨道220。此外,在培养板已经行进了侧轨道220的长度之后,它可以通过入口匝道捕获器254传送回主轨道210。在一些实施例中,主轨道210和侧轨道220是分开控制的。
54.在一些实施例中,一个或多个自动化堆垛机和卸垛机可沿侧轨道220放置。在一些实施例中,一个或多个自动化堆垛机的部分可延伸穿过梁234和236。自动化堆垛机和卸垛机的示例可以与图3(a)-图3(b)中示出的输送系统200集成。如图所示,自动化堆垛机和卸垛机300包括夹持机构310、马达322、双向丝杠324、马达332和升降垫334。夹持机构310包括夹具312和314。机柜302可以被定位在自动化堆垛机和卸垛机300上方并且由其支撑。定位
在机柜302内的培养板堆垛304也可以由自动化堆垛机和卸垛机300支撑。当自动化堆垛机和卸垛机300与输送系统200集成时,随着培养板306在传送带222和224顶部沿侧轨道220行进,培养板306可以通过自动化堆垛机和卸垛机300。
55.在操作期间,夹持机构310的夹具312和314可以将培养板保持在培养板堆垛304的底部。夹持机构可以通过马达322打开和闭合。更具体地,马达322可以旋转连接到夹具312和314的双向丝杠324。如图3(b)所示,整个培养板堆垛304可以被保持在侧轨道320上方,使得另一个培养板(例如,培养板306)可以在培养板堆垛304下行进而不接触它们。附加的培养板可以通过升降垫334提升并添加到培养板堆垛304中。类似地,培养板可以通过升降垫334降低并从培养板堆垛304中移除。升降垫334通过马达332提升和降低。在一些实施例中,马达332经由丝杠连接到升降垫334。在一些实施例中,马达322和332是电动马达(例如,ac马达、dc马达、步进马达等)。
56.图4示出了夹持机构310的夹具(例如,夹具312或314)如何可被配置为接触培养板堆垛内的培养板。如图所示,培养板410包括盖子412和底座414。类似地,培养板420包括盖子422和底座424。在该实施例中,夹持机构310的夹具被配置为接触培养板410的底座414(而不是盖子412)。如果盖子412被夹住(而不是底座414),底座414将落回到轨道220上。在该实施例中,夹持机构310的夹具接触培养板410的部分的厚度为0.5mm。此外,在该实施例中,夹持机构310的夹具在相对于培养板420的底部18mm的高度处接触底座414。然而,夹持机构310的夹具可以被配置为在相对于培养板420的底部16.8mm和21.4mm之间的任何高度处接触底座414。尽管如此,通过选择该范围中间的值,存在更高的误差容限。在其他实施例中,可以使用不同的尺寸。
57.图5(a)-图5(b)示出了夹持机构310的俯视图。如图5(a)所示,夹持机构310的夹具(例如夹具312或314)可以被配置为在两个不同的点处接触培养板510。在本实施例中,培养板510具有85mm的直径,并且两个不同的接触点相距42.5mm。然而,在其他实施例中,可以使用不同的尺寸。在该实施例中,夹持机构310的夹具接触培养板510的两个边缘相对于彼此以120度的角度定位。然而,在其他实施例中,可以增加该角度以增加夹持机构310的夹具接触培养板510的两个点之间的距离。此外,在其他实施例中,可以减小该角度以增加夹持机构310的可用致动距离。因此,在其他实施例中,夹持机构310的夹具的两个边缘之间的角度可以例如在80度和160度之间的任何位置。如图5(b)的实施例所示,可以打开夹持机构310,使得可以释放具有96mm或更小直径的培养板520。在其他实施例中,可以使用不同的尺寸。
58.图6(a)-图6(b)示出了夹持机构310如何可被配置为支撑培养板堆垛。如图所示,培养板堆垛包括培养板610和620。培养板610包括盖子612和底座614。类似地,培养板620包括盖子622和底座624。如图6(a)所示,由夹持机构310施加到培养板620的夹持力足以保持整个培养板堆垛的重量。替代地,如图6(b)所示,由夹持机构施加到培养板620的夹持力仅足以保持底座624的重量。在这种情况下,准许培养板堆垛向下滑动直到盖子622接触夹持机构310的夹具312和314。为了说明这种配置的优点,假设堆垛包括50个培养板并且具有2310克的总重量。此外,假设培养板与夹具312和314之间的摩擦系数为0.3。在这些参数下,图6(a)中施加的夹持力为75.5牛顿,并且6(b)中施加的夹持力只有1.5牛顿。因此,在图6(b)的配置中,底座624承受的应力明显小于其在图6(a)的配置中的应力。
59.图8(a)-图8(b)分别示出了自动化堆垛机和卸垛机300的侧视图和俯视图,其中自
动化堆垛机和卸垛机300包括销842和844。如图所示,当培养板810沿传送带222和224顶部的侧轨道220行进时,可以提升销842和844以停止培养板810。也可以降低销842和844以准许培养板810通过。在一些实施例中,销842和844可以被耦接到升降机334,使得升降机334和销842和844可以通过相同的机构(例如马达332)提升和降低。如本实施例所示,销842和844具有10mm的高度和6mm的直径。此外,销842和844间隔开80mm。然而,在其他实施例中,可以使用不同的尺寸。
60.如图8(a)所示,销842和844被配置为接触培养板810的底座814(而不是盖子812)。有利地,这种配置最小化销842和844需要被提升和降低的距离。在侧轨道220下空间稀少的实施例中,这尤其重要。然而,销842和844仍应被提升到侧轨道220上方防止培养板810跳过销842和844的足够高度(例如,4mm)。类似地,销842和844应被降低至侧轨道220下方允许培养板810越过销842和844的足够高度(例如,2.5mm)。例如,在一些情况下,底座814的边沿的一部分可以在传送带222和224下方延伸。这可能在底座814的边沿中的间隙与传送带222或224对齐时发生。具有带有间隙的边沿的培养板的示例如图7所示。如图所示,培养板710包括盖子712和底座714。底座714包括边沿716,边沿716具有间隙718。
61.图9示出了自动化堆垛机和卸垛机300的侧视图。如图所示,输送系统200还包括侧盖908,侧盖908被定位在底盖204上方。此外,升降垫334已被降低到载物台206的表面下方2.5mm的位置。与销842和844非常相似,升降垫334已被降低到载物台206的表面下方的位置,以确保沿侧轨道220行进的培养板(例如培养板910)可以越过升降垫334。在堆垛和/或卸垛过程期间,升降垫334可以被提升到夹持机构310的夹具312和314上方的位置。例如,在一些实施例中,升降垫334可以被提升到升降垫334的顶面与侧盖908的顶面齐平的位置。因此,在该实施例中,升降垫334可以被提升44.5mm(即,2.5mm加42mm)。
62.图10示出了自动化堆垛机和卸垛机300的侧视图。如图所示,夹持机构310的夹持力由弹簧1016提供。夹持机构310通过使用马达322旋转双向丝杠324而打开。随着双向丝杠324在第一方向(例如顺时针或逆时针)上旋转,丝杠螺母1026和1028分别从夹具312和314移开。随着双向丝杠324在第二相反方向(例如顺时针或逆时针)上旋转,丝杠螺母1026和1028分别朝向夹具312和314移动。当丝杠螺母1026和1028分别接触并推压夹具312和314时,夹持机构310开始打开。
63.在一些实施例中,弹簧1016可以提供足够的夹持力以在卸垛过程期间使培养板居中。如图所示,定位在机柜302内的培养板堆垛304包括培养板1010。培养板1010被定位在培养板堆垛304的底部处并且由夹持机构310保持。此外,培养板1010被保持处于使得夹具312距离丝杠螺母1026 2mm并且夹具314距离丝杠螺母1028 7mm的位置。因此,培养板1010不在包括传送带222和224的侧轨道220上方居中。在这种情况下,随着双向丝杠324在第二方向上旋转并且丝杠螺母1026和1028分别朝向夹具312和314移动,丝杠螺母1026将在丝杠螺母1028接触夹具314之前接触夹具312。当这种情况发生时,弹簧1016可以被配置为当(a)丝杠螺母1026推压夹具312和(b)丝杠螺母1028继续朝向夹具314移动时提供足够的夹持力以将夹具314拉向丝杠螺母1028。在这样的实施例中,弹簧1016可以提供大于或等于克服培养板堆垛304和升降垫334之间的摩擦所需的力的夹紧力,从而允许培养板1010在培养板堆垛下横向滑动。
64.图11(a)-图11(f)示出了自动化堆垛机和卸垛机1100的各种侧视图和/或组件。如
图11(a)所示,与上文讨论的自动化堆垛机和卸垛机300非常相似,自动化堆垛机和卸垛机1100包括夹持机构1110、弹簧1116、马达1122、双向丝杠1124、马达1132、升降垫1134、销1142和销1144。夹持机构1110包括夹具1112和1114。升降垫1134包括护罩1136。如图所示,自动化堆垛机和卸垛机1100被安装到顶板1101。在一些实施例中,顶板1101可以形成输送系统的载物台(例如,图2(a)-图2(g)的输送系统200的载物台206)的部分。如图所示,夹具1112、夹具1114、升降垫1134、销1142和销1144的部分可以延伸穿过顶板1101。在一些实施例中,马达1122和1132是电动马达(例如,ac马达、da马达、步进马达等)。
65.如图11(b)所示,马达1132经由丝杠1124连接到升降垫1134。此外,线性滑轨1150被耦接到升降垫1134。线性滑轨1150包括导轨1152和轴承座1154。升降垫1134被耦接到导轨1152,导轨1152可以通过轴承座1154向上和向下滑动。轴承座1154可以被耦接到自动化堆垛机和卸垛机1100的另一个固定组件(例如,顶板1101)和/或输送系统(例如,图2(a)-图2(g)的输送系统200的载物台206)。在操作期间,马达1132可以顺时针或逆时针旋转丝杠1138以提升或降低升降垫1134。随着升降垫1134由马达1132提升和降低,线性滑轨1150为升降垫1134提供稳定性。
66.如图11(c)所示,弹簧1116、双向丝杠1124和线性滑轨1160从夹具1112延伸到夹具1114。线性滑轨1160包括导轨1162和轴承座1164和1166。夹具1112和1114分别被耦接到轴承座1164和1166,轴承座1164和1166两者可以沿导轨1162滑动。如图11(d)所示,丝杠螺母1126和1128被定位在双向丝杠1124上。当组装自动化堆垛机和卸垛机1100时,丝杠螺母1126和1128被定位在夹具1112和1114之间的双向丝杠1124上。
67.在操作期间,马达1122可以顺时针或逆时针旋转双向丝杠1124以打开或闭合夹持机构1110。例如,为了打开夹持机构1110,马达1122可以旋转双向丝杠1124使得丝杠螺母1126和1128分别朝向夹具1112和1114移动。当丝杠螺母1126和1128分别接触和推压夹具1112和1114时,它们可能施加大于弹簧1116的夹持力(例如,23牛顿)并与弹簧1116的夹持力相反的力。当这种情况发生时,夹持机构开始打开。在此过程期间,线性滑轨1160为夹具1112和1114提供稳定性。类似地,为了闭合夹具机构1110,马达1122可以旋转双向丝杠1124,使得丝杠螺母1126和1128分别远离夹具1112和1114移动。当丝杠螺母1126和1128分别不再接触夹具1112和1114时,夹持机构1110闭合。
68.有利地,夹持机构1110不需要任何电力来保持在闭合位置,因为夹持力由弹簧1116提供。在该实施例中使用电力来打开夹持机构1110。因此,在断电的情况下,培养板堆垛将保持夹持并固定在自动化堆垛机和卸垛机1100中。此外,通过使用弹簧1116,夹持机构1110可以容易地适应具有不同直径的培养板。
69.如图11(e)所示,销1142和1144分别由弹簧1146和1148向上推动。此外,销1142经由横杆1145耦接到销1144。弹簧1146和1148被定位在横杆1145下面。在操作期间,升降垫1134可用于降低销1142和1144。例如,升降垫1134可通过马达1132降低到升降垫1134的一部分接触横杆1145并将弹簧1146和1148推入缩回状态的位置。因此,马达1132可以有利地用于致动升降垫1134以及销1142和1144。然而,在其他实施例中,可以使用多个马达来致动这些组件。在一些实施例中,升降垫1134接触横杆1145的部分是能够用两个或多个螺钉调节的凹口。在一些实施例中,销1142和1144由带有法兰的一对套筒轴承引导。在一些实施例中,销1142和1144被配置为接触培养板的底座(而不是盖子)。在其他实施例中,销1142和
1144被配置为接触培养板的盖子。在一些实施例中,弹簧1146和1148可以被配置为将销1142和1144提升6.5mm到顶板1101上方4mm的位置。在一些实施例中,弹簧1146和1148是锥形压缩弹簧,其有利地能够在压缩时完全展平,并最小化自动化堆垛机和卸垛机1100所需的空间。
70.如图11(f)所示,机柜1102可以被定位在自动化堆垛机和卸垛机1100上方并由其支撑。定位在机柜1102内的培养板堆垛1104也可以由自动化堆垛机和卸垛机1100支撑。如图所示,升降垫1134被提升到它触及培养板1105的位置,培养板1105在培养板堆垛1104的底部处。此外,升降垫1134的护罩1136防止朝向自动化堆垛机和卸垛机1100行进的另一个培养板1106意外被夹在升降垫1134下。
71.图12示出了自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300或1100)的控制电路的示意图。在该示意图中,带箭头的线通常指示数据流,而没有箭头的线是电源连接。在该实施例中,控制电路1200包括控制器1271、1272和1273。控制器1272和1273分别控制马达1222和1232。在一些实施例中,控制器1272和1273可以是专用马达控制器。如图所示,控制器1272从具有传感器模块1275(例如,sick的wll170-2p132光纤传感器)和传感器电缆1277(例如,sick的ll3-db01光纤传感器电缆)的光学传感器1276接收数据。在其他实施例中,光学传感器1276可能不包括传感器电缆(例如,sick的vte6-p3121s01光电接近传感器)。类似地,控制器1273从光学传感器1278(例如,松下的pm-y45光电传感器)接收数据。传感器1276和1278可以传输例如红外线或可见光。电源1274向控制器1272和1273供电,然后控制器1272和1273分别向传感器1276和1278供电。在一些实施例中,控制电路1200可以包括多个电源。
72.传感器1276可用于确定培养板是否准备好堆垛。例如,如果控制电路1200用于控制自动化堆垛机和卸垛机1100,则传感器1276可用于确定培养板是否被定位在夹持机构1110下面。在一些此类实施例中,传感器电缆1277可被安装到顶板1101并且传感器模块1275可被安装在别处。在操作期间,传感器模块1275通过传感器电缆1277发送光。当物体(例如培养板)在传感器电缆1277上方时,传感器模块1275最初发送的光通过传感器电缆1277反射回传感器模块1275。当这种情况发生时,传感器1276可以通过导线向控制器1272发送信号,指示培养板被定位在传感器1276上方。在一些实施例中,传感器1276的检测距离可以使用传感器模块1275上的调节器来调节。
73.传感器1278可用于确定升降垫是否处于特定位置。例如,如果控制电路1200用于控制自动化堆垛机和卸垛机1100,则传感器1278可用于确定升降垫1134是否处于起始位置。在一些实施例中,当处于起始位置时,升降垫1134可以被定位在顶板1101下面并且将销1142和1144保持在缩回位置。在一些实施例中,传感器1278是u形光学传感器。在一些这样的实施例中,当物体在传感器1278的u形的两侧之间打断光束时,传感器1278通过导线向控制器1272发送信号。有利地,这种类型的传感器可以高度准确、紧凑、并且便宜,并且它不会对自动化堆垛机和卸垛机1100的组件施加任何附加的力。
74.在一些实施例中,控制器1272和/或1273可用于检测马达1222和/或1232是否已经失速(stall)。例如,如果控制电路1200用于控制自动化堆垛机和卸垛机1100,则可以使用失速检测过程来确定夹持机构1110是否处于特定位置。例如,当夹持机构1110处于完全伸展的打开位置时,马达1222将失速。在这样的位置中,夹具1112和1114被推压到顶板1101中
的开口的部分,夹具1112和114延伸穿过该开口。当这种情况发生时,控制器1273将检测马达1222已经失速并且因此夹持机构1110处于完全伸展的打开位置。有利地,这种类型的检测过程不需要附加的传感器。
75.然而,在一些实施例中,控制电路1200可以包括附加的传感器。例如,如果控制电路1200用于控制自动化堆垛机和卸垛机1100,则可以使用附加的传感器来确定(a)机柜1102是否是满的,(b)机柜1102是否是空的,(c)培养板是否处于可将其添加到机柜1102中的板1104的堆垛的堆垛位置,(d)夹持机构1110的位置,(e)升降垫1134的位置,和/或(f)销1142和1144的位置。此外,在一些实施例中,传感器1276和/或1278可以用不同类型的传感器代替。例如,传感器1276和/或1278可以用一个或多个超声波传感器、电感传感器和/或电容传感器代替。
76.如图12所示,控制器1272和1273之间的通信由三条数据线处理。两条导线将控制器1272上的输出端连接到控制器1273上的输入端。如果控制电路1200用于控制自动化堆垛机和卸垛机1100,则这些导线可以捎带告诉控制器1273打开或闭合夹持机构1110的信号。此外,另一条导线可以将反馈信号从控制器1273上的输出端传输到控制器1272上的输入端。如果控制电路1200用于控制自动化堆垛机和卸垛机1100,则该导线可以传输信号,该信号告诉控制器1272夹持机构1110是打开还是闭合。如图所示,控制器1271和1272之间的通信由单条数据线处理。如果控制电路1200用于控制自动化堆垛机和卸垛机1100,则该数据线可以将信号从控制器1271传输到控制器1272,该信号告诉控制器1272堆垛或卸垛培养板。
77.在一些实施例中,控制器1271、1272和/或1273可以通过以下类型的通信接口或标准中的任何一种来通信:usb、以太网、rs-232、串行外围接口(“spi”)、集成电路(“i2c”)、控制器局域网(“can”)或定制通信接口。控制器1271、1272和/或1273也可以通过例如wifi、蓝牙、zigbee或定制无线通信协议来无线通信。类似地,可以分别在控制器1272和1273与传感器1276和1278之间使用多种通信接口或标准。
78.本领域的技术人员将理解,可以对图12的控制电路1200做出各种修改。例如,在一些实施例中,控制电路1200可以包括用于将信号从控制器1271传输到控制器1273的附加数据线,该信号告诉控制器1273堆垛或卸垛培养板。作为另一个示例,在一些实施例中,控制器1272和1273的角色可以互换。例如,控制器1273可以从控制器1271接收命令并向控制器1272发送命令。作为另一个示例,在一些实施例中,控制器1272和1273可以不直接通信。相反,控制器1272和1273可以从控制器1271接收命令并将数据发送到控制器1271。作为又一个示例,在一些实施例中,控制器1271、1272和/或1273可以组合为单个集成控制器。
79.图13示出了可以由自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300或1100)执行的堆垛方法1300。应理解,图13中的箭头意在说明可以执行方法1300的各种过程的一种可能的顺序。然而,在一些实施例中,图13中所示的框可以重新排列。此外,在一些实施例中,可以添加和/或移除一个或多个框。图14(a)-图14(h)示出了在执行方法1300的实施例的自动化样本处理系统中的自动化堆垛机和卸垛机1400。在一些实施例中,自动化堆垛机和卸垛机1400可以以与自动化堆垛机和卸垛机300和/或1100大致相同的方式构造和/或操作。
80.在框1310中,自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机1400)被初始
化,使得升降垫(例如,升降垫1434)和销(例如,销1442和1444)被定位在输送轨道(例如,侧轨道1420)下方。框1310的实施例在图14(a)中示出。
81.在框1320中,将销(例如销1442和1444)提升到输送轨道(例如侧轨道1420)上方的足够高度以停止进入的培养板(例如培养板1406)。在一些实施例中,这还可以涉及提升升降垫(例如升降垫1434)。例如,如上文参照图11(a)-图11(f)的自动化堆垛机和卸垛机1100所解释的,马达1132(图11(e))控制升降垫1434和销1142和1144。图14(b)中示出了框1320的实施例。如图所示,销1442和1444在侧轨道1420上方延伸,并且升降垫1434的顶面被定位在侧轨道1420的正下方。
82.在框1330中,进入的培养板(例如,培养板1406)由提升的销(例如,销1442和1444)停止在既在培养板堆垛(例如,培养板1404的堆垛)的正下面又在升降垫(例如,升降垫1434)的正上方的位置处。框1330的实施例在图14(c)中示出。
83.在框1340中,培养板(例如,培养板1406)由升降垫(例如,升降垫1434)提升到培养板的盖子的顶面触及或靠近培养板堆垛(例如,培养板堆垛1404)的底部处的培养板的底座的底面的位置。在培养板仅被提升到靠近培养板堆垛的位置的实施例中,在其间存在小间隙。在夹持机构(例如夹持机构1410)打开之后,培养板堆垛可以落入间隙的短距离。然而,在培养板堆垛触及培养板的盖子的顶面后,培养板可以支撑培养板堆垛。框1340的实施例在图14(d)中示出。
84.在框1350中,夹持机构(例如,夹持机构1410)打开并且培养板(例如,培养板1406)连同整个培养板堆垛(例如,培养板堆垛1404)一起通过升降垫提升。在该框中,培养板可以被提升到当夹持机构再次闭合时夹持机构的夹具(例如夹具1412和1414)将接触培养板的位置。框1350的实施例在图14(e)中示出。
85.在框1360中,夹持机构(例如,夹持机构1410)闭合。如图14(f)所示,当夹持机构1410闭合时,夹持机构1410的夹具(例如夹具1412和1414)接触培养板1406。更具体地,夹具接触培养板1406的底座。如上面关于图6(a)-图6(b)所讨论的,由夹持机构1410施加到培养板1406的夹持力可以在这种类型的配置中最小化。然而,可以使用其他配置。
86.在框1370中,升降垫(例如,升降垫1434)被降低到输送轨道(例如,侧轨道1420)下方的位置。框1370的实施例在图14(g)中示出。在一些实施例中,升降垫可以被降低到它在框1320期间所处的类似位置。例如,在图14(b)和图14(g)中,升降垫1434处于类似位置。
87.在框1380中,销(例如,销1442和1444)被降低到输送轨道(例如,侧轨道1420)下方的位置。在一些实施例中,这还可涉及降低升降垫(例如升降垫1434)。例如,如上文参考图11(a)-图11(f)的自动化堆垛机和卸垛机1100所解释的,马达1132控制升降垫1134以及销1142和1144。框1380的实施例在图14(h)中示出。
88.图15示出了可以由自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300或1100)执行的卸垛方法1500。应理解,图15中的箭头意在说明可以执行方法1500的各种过程的一种可能的顺序。然而,在一些实施例中,图15中所示的框可以重新排列。此外,在一些实施例中,可以添加和/或移除一个或多个框。图16(a)-图16(h)示出了在执行方法1500的实施例的自动化样本处理系统中的自动化堆垛机和卸垛机1600。在一些实施例中,自动化堆垛机和卸垛机1600可以以与自动化堆垛机和卸垛机300和/或1100大致相同的方式构造和/或操作。
89.在框1510中,自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机1600)被初始化,使得升降垫(例如,升降垫1634)和销(例如,销1642和1644)被定位在输送轨道(例如,侧轨道1620)下方。框1510的实施例在图16(a)中示出。
90.在框1520中,销(例如,销1642和1644)被提升到输送轨道(例如,侧轨道1620)上方的位置。在一些实施例中,这还可以涉及提升升降垫(例如升降垫1634)。例如,如上文参考图11(a)-图11(f)的自动化堆垛机和卸垛机1100所解释的,马达1132控制升降垫1134以及销1142和1144。框1520的实施例在图16(b)中示出。如图所示,销1642和1644在侧轨道1620上方延伸,并且升降垫1634的顶面被定位在侧轨道1620的正下方。
91.在框1530中,升降垫(例如,升降垫1634)被提升到升降垫的顶面触及或靠近培养板堆垛(例如培养板堆垛1604)的底部处的第一培养板(例如,培养板1606)的底座的底面的位置。在升降垫仅被提升到靠近培养板堆垛的位置的实施例中,在其间存在小间隙。在夹持机构(例如夹持机构1610)打开之后,培养板堆垛可以落入间隙的短距离。然而,在培养板堆垛触及升降垫的顶面之后,升降垫可以支撑培养板堆垛。框1530的实施例在图16(c)中示出。
92.在框1540中,夹持机构(例如,夹持机构1610)打开并且第一培养板(例如,培养板1606)连同整个培养板堆垛(例如,培养板堆垛1604)一起由升降垫降低。在该框中,搁置在第一培养板的盖子顶部的第二培养板(例如,培养板1607)可以被降低到当夹持机构再次闭合时夹持机构的夹具(例如,夹具1612和1614)将接触第二培养板的位置。框1540的实施例在图16(d)中示出。
93.在框1550中,夹持机构(例如,夹持机构1410)闭合。如图16(e)所示,当夹持机构1610闭合时,夹持机构1610的夹具(例如,夹具1612和1614)接触培养板1607。更具体地,夹具接触培养板1607的底座。如上文关于图6(a)-图6(b)所讨论的,由夹持机构1610施加到培养板1607的夹持力可以在这种类型的配置中最小化。然而,可以使用其他配置。
94.在框1560中,升降垫(例如,升降垫1634)被降低到输送轨道(例如,侧轨道1620)下方的位置。框1560的实施例在图16(f)中示出。在一些实施例中,升降垫可以被降低到它在框1520期间所处的类似位置。例如,在图16(b)和图16(f)中,升降垫1634处于类似位置。
95.在框1570中,销(例如,销1642和1644)被降低到输送轨道(例如,侧轨道1620)下方的位置。在一些实施例中,这还可以涉及降低升降垫(例如升降垫1634)。例如,如上文参考图11(a)-图11(f)的自动化堆垛机和卸垛机1100所解释的,马达1132控制升降垫1134以及销1142和1144。框1570的实施例在图16(g)中示出。
96.在框1580中,第一培养板(例如,培养板1606)通过输送轨道(例如,侧轨道1620)运送到自动化样本处理系统内的另一方位。框1580的实施例在图16(h)中示出。
97.图17(a)-图17(k)示出了另一自动化堆垛机和卸垛机的各种侧视图和/或组件。如图所示,自动化堆垛机和卸垛机1700包括夹持机构1710、马达1722、马达1732、升降垫1734、销1742、销1744、控制器1772、控制器1773、传感器1776、传感器1777、传感器1778和传感器1779。夹持机构1710包括夹具1712和1714。控制器1772控制马达1732,马达1732用于提升和降低升降垫1734、销1742和销1744。控制器1773控制马达1722,马达1722用于打开和闭合夹持机构1710。在一些实施例中,马达1722和1732是电动马达(例如,ac马达、dc马达、步进马达等)。在一些实施例中,控制器1772和1773可以分别以与图12的控制器1272和1273大致相
同的方式构造和/或操作。此外,在一些实施例中,控制器1772和1773可以从另一个控制器(未示出)(例如控制器1271)接收命令,并将数据发送到该控制器。
98.传感器1776可用于确定培养板是否准备好堆垛。例如,传感器1776可用于确定培养板是否被定位在夹持机构1710下面。在一些实施例中,传感器1776可以是光学传感器(例如,sick的vte6-p3121s01光电接近传感器)。如图所示,升降垫1734包括孔1739,传感器1776可以通过该孔传输和/或接收信号。例如,传感器1776可以通过孔1739传输光信号和接收反射的光信号。当物体(例如培养板)在传感器1776上方时,最初由传感器1776传输的光通过孔1739反射回传感器1776。如果发生这种情况,传感器1776可以向控制器1772发送指示培养板被定位在传感器1776上方的信号。在一些实施例中,传感器1776的检测距离可以使用调节器(未示出)来调节。
99.传感器1777、1778和1779可用于确定升降垫1734是否处于特定位置。例如,传感器1277可用于确定升降垫1734是否处于图17(i)所示的位置,传感器1278可用于确定升降垫1734是否处于图17(j)所示的位置,传感器1279可用于确定升降垫1734是否处于图17(k)所示的位置。在一些实施例中,传感器1777、1778和/或1779可以是u形光学传感器(例如,松下的pm-y45光电传感器)。在一些这样的实施例中,传感器1777、1778和/或1779可以在物体(例如,升降垫1734的臂1737)在传感器1777、1778和/或1779的u形的两侧之间打断光束时向控制器1772发送信号。在一些实施例中,以与传感器1777、1778和/或1779大致相同的方式构造和/或操作的附加的传感器可以被包括在自动化堆垛机和卸垛机1700中以确定其他组件(例如夹持机构1710)是否处于特定位置。
100.如图17(a)所示,自动化堆垛机和卸垛机1700可以被并入包括载物台1701、传送带1702、传送带1703、传送带1704、传送带1705、壁1708和壁1709的自动化样本处理系统中。在操作期间,培养板可以沿传送带1704和1705朝向自动化堆垛机和卸垛机1700行进。壁1708和1709可以通过确保培养板不会滑离传送带1704和1705来帮助引导培养板朝向自动化堆垛机和卸垛机1700。在一些实施例中,传送带1702和1703可以形成主轨道(例如,主轨道210)的一部分,并且传送带1704和1705可以形成主轨道(例如,侧轨道220)的一部分。在这样的实施例中,自动化样本处理系统还可以包括用于在主轨道和侧轨道之间传送培养板的一个或多个机构(例如,出口匝道捕获器252和/或入口匝道捕获器254)。
101.如图17(b)所示,自动化堆垛机和卸垛机1700包括两个单独的组件。一个组件包括马达1732、升降垫1734、销1742、销1744和控制器1772。该组件可以被耦接到载物台1701的底面。另一个组件包括夹持机构1710、马达1722和控制器1773。如图17(a)所示,该组件可以通过支撑梁1713和1715耦接到壁1708和1709。在其他实施例中,自动化堆垛机和卸垛机1700的组件可以更加集成。例如,单个控制器可以控制马达1722和1732。
102.如图17(c)和图17(d)所示,弹簧1716从夹具1712延伸到夹具1714。此外,轴承座1764、轴承座1766和轴承座1768分别被耦接到夹具1712、夹具1714和双向丝杠1724。在操作期间,马达1722可以顺时针或逆时针旋转双向丝杠1724以打开或闭合夹持机构1710。例如,为了打开夹持机构1710,马达1722可以旋转双向丝杠1724,使得轴承座1768向下移动。由于轴承座1768的楔形形状,当它向下移动时,它在向外方向上推动轴承座1764和1766。例如,从图17(c)和图17(d)的角度来看,随着轴承座1768向下移动,轴承座1768在向左方向上推动轴承座1764,并且它在向右方向上推动轴承座1766。类似地,为了闭合夹持机构1710,马
达1722可以旋转双向丝杠1724,使得轴承座1768向上移动。随着轴承座1768向上移动,弹簧1716在向内方向上拉动轴承座1764和1766。例如,从图17(c)和图17(d)的角度来看,随着轴承座1768向下移动,弹簧1716在向右方向上拉动轴承座1764,并且它在向左方向上拉动轴承座1766。
103.有利地,与夹持机构1110非常相似,夹持机构1710不需要任何电力来保持在闭合位置,因为夹持力由弹簧1716提供。在该实施例中使用电力来打开夹持机构1710。因此,在断电的情况下,培养板堆垛将保持夹持并固定在自动化堆垛机和卸垛机1700中。此外,通过使用弹簧1716,夹持机构1710可以容易地适应具有不同直径的培养板。
104.如图17(e)和图17(f)所示,马达1732经由丝杠1738连接到升降垫1734。此外,线性滑轨1750被耦接到升降垫1734。线性滑轨1750包括导轨1752和轴承座1754。升降垫1734被耦接到导轨1752,导轨1752可以通过轴承座1754上下滑动。轴承座可以被耦接到另一个固定组件,例如载物台1701的底面。在操作期间,马达1732可以顺时针或逆时针旋转丝杠1738,以提升或降低升降垫1734。随着升降垫1734由马达1732提升和降低,线性滑轨1750为升降垫1734提供稳定性。如图17(e)所示,升降垫1734处于降低状态。如图17(f)所示,升降垫1734处于提升状态。
105.有利地,升降垫1734包括柱1733和1735,柱1733和1735为通过自动化堆垛机和卸垛机1700堆垛或卸垛的培养板提供附加的支撑。如图所示,柱1733和1735的顶面大致与升降机1734的中央垫1731共面。此外,柱1733和1735与中央垫1731之间的间隙大到足以容纳传送带1704和1705。因此,传送带1704和1705不会阻碍升降垫1734的向上或向下运动。在一些实施例中,升降垫1734可以包括附加的柱。此外,在一些实施例中,柱1733和/或1735可以从升降垫1734省略。例如,升降垫1734可以构造得更像升降垫1134(参见例如图11(b))。类似地,在一些实施例中,升降垫1134可以构造得更像升降垫1734并且包括一个或多个柱,该一个或多个柱为通过自动化堆垛机和卸垛机1100堆垛或卸垛的培养板提供附加的支撑。
106.如图17(g)和图17(h)所示,销1742和1744分别由弹簧1746和1748向上推动。此外,销1742经由板1745耦接到销1744。弹簧1746和1748被定位在板1745下面。销1742和1744的向上和向下运动由引导结构1756引导。在一些实施例中,弹簧1746和1748可以被配置为将销1742和1744提升6.5mm到比载物台1701高4mm的位置。在一些实施例中,弹簧1746和1748是锥形压缩弹簧,其有利地能够在压缩时完全展平,并最小化自动化堆垛机和卸垛机1700所需的空间。如图17(g)所示,销1742和1744被完全提升。如图17(h)所示,销1742和1744部分缩回。在一些实施例中,销1742和1744被配置为接触培养板的底座(而不是盖子)。在其他实施例中,销1742和1744被配置为接触培养板的盖子。
107.如图17(i)-图17(k)所示,升降垫1734可用于降低销1742和1744。因此,马达1732可有利地用于致动升降垫1734、柱1733、柱1735、销1742和销1744。然而,在其他实施例中,可以使用多个马达来致动这些组件。如图17(i)所示,升降垫1734可以通过马达1732降低到升降垫1734的底座1736接触板1745的臂1747并向弹簧1746和1748施加向下的力的位置。如图17(j)所示,升降垫1734可以通过马达1732提升到底座1736触及臂1747而不对弹簧1746和1748施加显着的向下力的位置。如图17(k)所示,升降垫1734可以通过马达1732提升到底座1736不触及臂1747的位置。如图17(j)和图17(k)所示,销1742和1744被完全提升。
108.在一些实施例中,方法1300和/或1500的一个或多个框可以由自动化堆垛机和卸
垛机1700执行。例如,如图17(i)所示,自动化堆垛机和卸垛机1700可以被初始化,使得升降垫1734、销1742和销1744被定位在传送带1704和1705下方。因此,框1310和/或1510可以由自动化堆垛机和卸垛机1700执行。作为另一个示例,如上所述,马达1732可以提升或降低升降垫1734和/或销1742和1744。因此,框1320、1330、1340、1370、1380、1520、1530、1560和/或1570可以由自动化堆垛机和卸垛机1700执行。作为又一个示例,如上所述,马达1722可以打开或闭合夹持机构1710。因此,框1350、1360、1540和/或1550可以由自动化堆垛机和卸垛机1700执行。
109.图18(a)-图18(q)示出了可单独使用或与上述任何自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300、1100、1400、1600和1700)组合使用的止动机构。例如,这些止动机构中的一个或多个可以代替输送系统200中的止动机构242、244和/或246。作为另一示例,图18(a)-图18(q)的止动机构中的一个或多个可以代替上述任何自动化堆垛机和卸垛机的销和/或相关组件(例如销842、844、1142、1144、1442、1444、1642、1644、1742和1744)。
110.如图18(a)-图18(c)所示,止动机构可以包括销1842a和1844a。如图18(a)所示,销1842a和1844a可以沿具有传送带1822和1824的侧轨道1820定位。在操作期间,出口匝道捕获器1850可以将培养板(例如培养板1806)从具有传送带1812和1814的主轨道1810传送到侧轨道1820。如图所示,出口匝道捕获器1850包括臂1852、枢轴接头1854和柱1856。出口匝道捕获器1850可以以与出口匝道捕获器252和/或入口匝道捕获器254相同的方式操作。例如,在操作期间,出口匝道捕获器1850可以围绕枢轴接头1854顺时针旋转,使得臂1852延伸跨过传送带1812和1814。在该位置时,出口匝道捕获器1850可以防止培养板进一步沿主轨道1810行进。传感器1876可用于确认培养板已由出口匝道捕获器1850停止。在以这种方式停止培养板之后,出口匝道捕获器1850可围绕枢轴接头1854逆时针旋转并推动停止的培养板到侧轨道1820上。在操作期间,销1842a和1844a可以被提升以防止培养板进一步沿侧轨道1820行进。类似地,止动器1860可以用于防止培养板进一步沿侧轨道1820行进。传感器(例如传感器1878)可以用于确认培养板已经由销1842a和1844a和/或止动器1860停止。壁1808和1809可以帮助引导培养板沿侧轨道1820。
111.图18(b)提供了已由销1842a和1844a停止的培养板1806的俯视图。图18(c)示出了沿图18(b)的线a截取的横截面。如图所示,销1842a和1844a被配置为接触培养板1806的底座1805(而不是盖子1807)。如上所讨论的,这种配置有利地最小化销1842a和1844a需要被提升和降低的距离。在侧轨道1820下空间稀少的实施例中,这尤其重要。然而,销1842a和1844a仍应被提升到侧轨道1820上方防止培养板1806跳过销1842a和1844a的足够高度(例如,4mm)。类似地,销1842a和1844a应被降低到侧轨道1820下方允许培养板1806越过销1842a和1844a的足够高度(例如,2.5mm)。
112.如图18(d)所示,可以修改销1842a和1844a以接触培养板1806的盖子1807。在图18(d)的侧视图中,销1842a已由销1842b代替。这种配置的一个潜在缺点是,例如销1842b和盖子1807之间的碰撞可能会使盖子1807从底座1805上脱落。由于销1842a和1844a被配置为接触培养板1806的底座1805(而不是盖子1807),因此图18(a)-图18(c)的止动机构解决了这个潜在的问题。
113.然而,如图18(e)和图18(f)所示,当培养板1806由例如载体1881a和样品器皿1882代替时,存在不同的风险。如上所述,本文所述的自动化样本处理系统可用于处理各种不同
的物体。培养板是运送生物样品的常用载体。然而,其他类型的物体(例如载玻片、盒和器皿(例如,管、螺旋盖容器等))可用于运送生物样品。如图18(e)和图18(f)所示,载体1881a在其沿侧轨道1820行进时承载样品器皿1882。样品器皿1882的结构可以使得它在没有载体1881a的情况下不能安全和/或可靠地沿侧轨道1820行进。例如,样品器皿1882可以是既易碎又容易卡在传送带1822和1824之间的管。在一些实施例中,载体1881a可以具有圆形轮廓,该圆形轮廓具有与培养板1806相当的直径。然而,如图所示,载体1881a可以比培养板1806高。
114.如图18(e)和图18(f)所示,销1842a在低于销1842b的点处接触载体1881a。结果,增加了样品器皿1882将响应于例如销1842a和载体1881a之间的碰撞而倾倒的风险。然而,如上所解释的,销1842a的高度对于培养板是有利的。图18(g)-图18(n)所示的止动机构组合了关于图18(a)-图18(f)描述的止动机构提供的一些优点。
115.例如,如图18(g)和图18(h)所示,销1842a已由销1842c代替。与销1842b相比,销1842c包括凹槽1883c。如图18(g)所示,载体1881a接触销1842c的上部1884c和下部1885c。结果,销1842c在比销1842a更高的点处接触载体1881a。因此,降低了样品器皿1882将响应于例如销1842c和载体1881a之间的碰撞而倾倒的风险。此外,如图18(h)所示,培养板1806的底座1805接触销1842c的下部1885c。培养板1806的盖子1807被接收在凹槽1883c中,但它不接触销1842c。结果,降低了盖子1807将从底座1805脱落的风险。
116.作为另一示例,如图18(i)和图18(j)所示,销1842a已由销1842d代替。与销1842c相比,销1842d的上部1884d具有增加的宽度。如图18(i)所示,载体1881a仅接触销1842d的上部1884d(而不是下部1885d)。结果,销1842d还在比销1842a更高的点处接触载体1881a。因此,降低了样品器皿1882将响应于例如销1842d和载体1881a之间的碰撞而倾倒的风险。此外,如图18(j)所示,培养板1806的底座1805接触销1842d的下部1885d。培养板1806的盖子1807被接收在凹槽1883d中,但它不接触销1842d。结果,降低了盖子1807将从底座1805脱落的风险。
117.作为又一示例,如图18(k)所示,销1842a已经由销1842e代替,并且载体1881a已经由载体1881b代替。与图18(g)-图18(j)的实施例相比,销1842a和载体1881a两者已被修改。如图所示,载体1881b的唇缘1886b接触销1842e的窄上部1884e。结果,销1842e在比销1842a接触载体1881a更高的点处接触载体1881b。因此,降低了样品器皿1882将响应于例如销1842e和载体1881b之间的碰撞而倾倒的风险。此外,如图18(l)所示,培养板1806的底座1805接触销1842e的宽下部1885e。由于上部1884e具有小于下部1885e宽度的宽度,培养板1806的盖子1807不接触销1842e。结果,降低了盖子1807从底座1805脱落的风险。
118.作为又一示例,如图18(m)所示,销1842a已由销1842f代替,并且载体1881a已由载体1881c代替。与销1842e相比,销1842f的窄上部1884f还包括延伸部1883f。此外,与载体1881b相比,载体1881c具有带有凹槽1887的唇部1886c。如图所示,唇部1886c接触部分1884f。此外,凹槽1887接收延伸部1883f。结果,销1842f在比销1842a接触载体1881a更高的点处接触载体1881c。因此,降低了样品器皿1882将响应于例如销1842f和载体1881c之间的碰撞而倾倒的风险。此外,如图18(n)所示,培养板1806的底座1805接触销1842f的宽下部1885f。由于上部1884f具有比下部1885f更小的宽度并且延伸部1883f被定位在培养板1806上方,因此培养板1806的盖子1807不接触销1842f。结果,降低了盖子1807从底座1805脱落
的风险。
119.本领域的技术人员将理解,可以对图18(a)-图18(n)的止动机构做出各种修改。例如,可以将弹性元件(例如弹簧)添加到图18(a)-图18(l)的任何止动机构,以减少与培养板1806和/或载体1881a、1881b和/或188c的碰撞力。例如,如图18(o)所示,销1842g的宽下部1885f可以延伸到传送带1822下方并与弹性元件1888耦接。当载体1881b的唇缘1886b接触销1842g的窄上部1884g时,弹性元件1888将压缩并且吸收部分碰撞力。这种配置还可以减少由这种碰撞产生的噪音。作为另一个示例,图18(a)-图18(n)的止动机构的任何销可以被配置为旋转,以旋转培养板1806和/或载体1881a、1881b和/或188c。例如,如图18(p)所示,销1842h可以被配置为旋转。在一些实施例中,马达(未示出)可以被耦接到销1842h的较宽的下部1885h。当载体1881b的唇缘1886b接触销1842h的窄上部1884h时,销1842h可以旋转以便旋转载体1881b。随着载体1881b旋转,扫描仪1889可以扫描载体1881b和/或样品器皿1882以寻找条形码和/或另一个识别标记。作为又一示例,包括在图18(a)-图18(n)的止动机构中的销的数量可以增加或减少。例如,如图18(q)所示,单个销1841与壁1808和1809组合可用于停止培养板1806。
120.图19(a)-图19(e)示出了可单独使用或与上述任何自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300、1100、1400、1600、和1700)组合使用的另一止动机构。例如,图19(a)-图19(e)的止动机构可以代替输送系统200中的止动机构242、244和/或246。作为另一示例,图19(a)-图19(e)的止动机构可以替换上述任何自动化堆垛机和卸垛机的销和/或相关组件(例如销842、844、1142、1144、1442、1444、1642、1644,1742、1744、1841、1842a和1844a)。
121.如图19(a)-图19(e)所示,止动机构可以包括平台1941、销1943和销1944。如图19(e)的俯视图所示,平台1941可以被定位在传送带1922和1924之间的载物台1901上。图19(a)-图19(d)是沿图19(e)的线b截取的横截面。如图19(a)-图19(d)所示,销1944可以被定位在平台1941下面并延伸穿过载物台1901。如图19(a)所示,在操作期间,培养板1906可以沿传送带1922和1924朝向平台1941行进。如图19(b)所示,当培养板1906的全部或部分在平台1941上方时,销1944可以被提升。当销1941被提升时,它在平台1941上施加向上的力,导致平台1941围绕销1943逆时针旋转。如图19(c)所示,培养板1906已停止移动。更具体地,培养板1906搁置在平台1941上的传送带1922和1924上方。如图19(d)所示,可以降低销1944以便将培养板1906降低回到传送带1922和1924上。随着销1941被降低,平台1941的重量使其围绕销1943顺时针旋转。然后培养板1906可以沿传送带1922和1924远离平台1941行进。
122.在一些实施例中,压缩空气可用于提升或降低销1944。在一些实施例中,由于不需要将销1944提升或降低很远的距离,因此电动马达(未示出)(例如ac马达、dc马达或步进马达)可用于提升或降低销1941。在一些实施例中,销1944可以以与销842、844、1142、1144、1442、1444、1642、1644、1742、1744、1841、1842a和/或1844a大致相同的方式操作。
123.在一些实施例中,传感器(未示出)可用于确认培养板1906的全部或部分在平台1941上方。在一些实施例中,传感器可以是光纤传感器。在一些实施例中,传感器可以被定位在传送带1922或1924旁边。在一些实施例中,传感器可以被耦接到平台1941。在一些实施例中,传感器可以被定位在平台1941中的孔(未示出)下面。在这样的实施例中,传感器可以通过穿过平台1941中的孔传输和/或接收信号以与传感器1776大致相同的方式操作。例如,
传感器可以穿过平台1941中的孔传输光信号和接收反射的光信号。
124.与图18(a)-图18(q)的止动机构相比,图19(a)-图19(e)的止动机构可能产生较少的噪音。在许多输送系统中,轨道的传送带通常会继续移动,而不管培养板是否已经由例如图18(a)-图18(q)的止动机构或图19(a)-图19(e)的止动机构中的一个停止。然而,当培养板由图18(a)-图18(q)的止动机构中的一个停止时,传送带会摩擦培养板的底座并产生噪音。相反,当培养板由图19(a)-图19(e)的止动机构停止时,培养板和传送带之间没有接触。
125.图20(a)和图20(b)示出了可单独使用或与上述任何自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300、1100、1400、1600和1700)组合使用的又一止动机构。例如,图20(a)和图20(b)的止动机构可以代替输送系统200中的止动机构242、244和/或246。作为另一示例,图20(a)和图20(b)的止动机构可代替上述任何自动化堆垛机和卸垛机的销和/或相关组件(例如销842、844、1142、1144、1442、1444、1642、1644、1742、1744、1841、1842a和1844a)。
126.如图20(a)和图20(b)所示,止动机构可以包括平台2041、销2043、销2042和销2044。如图20(a)的俯视图所示,平台2041可以被定位在载物台2001上,在传送带2024旁边。此外,销2042可以被定位在载物台2001上,在传送带2022旁边。图20(b)是沿图20(a)的线c截取的横截面。如图20(b)所示,销2044可以延伸穿过载物台2001。类似地,销2042也可以延伸穿过载物台2001。图20(a)和图20(b)的止动机构可以以与图19(a)-图19(e)的止动机构大致相同的方式操作。例如,当培养板2006的全部或部分在平台2041上方时,销2042和2044可以被提升。当销2044被提升时,它在平台2041上施加向上的力,导致平台2041围绕销2043逆时针旋转。如图20(b)所示,培养板2006已停止移动。更具体地,培养板2006的一部分由平台2041保持在传送带2022和2024上方。此外,销2042支撑培养板2006并帮助确保培养板2006不会从平台2041滑落。销2042和2044可以被降低,以将培养板2006降低回到传送带2022和2024上。当销2041被降低时,平台2041的重量使其围绕销2043顺时针旋转。然后培养板2006可以沿传送带2022和2024远离平台2041行进。
127.在一些实施例中,压缩空气可用于提升或降低销2042和2044。在一些实施例中,由于不需要将销2042和2044提升或降低很远的距离,因此电动马达(未示出)(例如ac马达、dc马达或步进马达)可用于提升或降低销2041。在一些实施例中,销2042和2044可以以与销842、844、1142、1144、1442、1444、1642、1644、1742、1744、1841、1842a和/或1844a大致相同的方式操作。
128.如图20(a)所示,传感器2076可以被定位在传送带2022和2024之间的载物台2001上并且用于确认培养板2006的全部或部分在平台2041上方。在一些实施例中,传感器2076可以是光纤传感器。在其他实施例中,传感器2076可以移动到不同的方位。例如,传感器2076可以被定位在传送带2022或2024旁边。在其他实施例中,传感器2076可以被耦接到平台2041。在其他实施例中,传感器2076可以被定位在平台2041中的孔(未示出)下面。在这样的实施例中例如,传感器2076可以通过穿过平台2041中的孔传输和/或接收信号以与传感器1776大致相同的方式操作。例如,传感器2076可以穿过平台2041中的孔传输光信号和接收反射的光信号。
129.与图18(a)-图18(q)的止动机构相比,图20(a)和图20(b)的止动机构可能产生较少的噪音。在许多输送系统中,轨道的传送带通常会继续移动,而不管培养板是否已经由例
如图18(a)-图18(q)的止动机构或图20(a)和图20(b)的止动机构中的一个停止。然而,当培养板由图18(a)-图18(q)的止动机构中的一个停止时,传送带会摩擦培养板的底座并产生噪音。相反,当培养板由图20(a)和图20(b)的止动机构停止时,培养板和传送带之间没有接触。
130.本领域的技术人员将理解,可以对图20(a)和图20(b)的止动机构做出各种修改。例如,平台2041和销2042的位置可以颠倒,使得平台2041被定位在载物台2001上在传送带2022旁边,并且销2042被定位在载物台2001上在传送带2024旁边。作为另一个示例,平台2041可以被定位在传送带2022和2024之间的载物台2001上。作为又一个示例,销2042可以用与销铰链接合的第二平台代替,该销与平台2041结合操作以停止进入的培养板。作为又一示例,平台2041可以通过与销2042不同的机构旋转。
131.图21示出了可单独使用或与上述任何自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300、1100、1400、1600、和1700)组合使用的又一止动机构(即,挡板止动器2100)。例如,挡板止动器2100可以代替输送系统200中的止动机构242、244和/或246。作为另一个示例,挡板止动器2100可以代替上述任何自动化堆垛机和卸垛机的销和/或相关组件(例如,销842、844、1142、1144、1442、1444、1642、1644、1742、1744、1841、1842a和1844a)。
132.如图所示,挡板止动器2100包括挡板2142和2144、外壳2190、致动器2191、2192、2193和2194,以及轴2195、2196和2197。致动器2191、2192、2193和2194被设置在外壳2190内。在一些实施例中,致动器2191、2192、2193和2194中的一个或多个可以是音圈致动器。例如,致动器2191、2192、2193和2194中的一个或多个可以是动磁致动器或动圈致动器。在一些实施例中,致动器2191、2192、2193和2194中的一个或多个可以是气动致动器。如图所示,挡板2142通过轴2195可旋转地耦接到外壳2190。结果,挡板2142可以围绕由轴2195限定的轴线旋转。挡板2142还分别通过轴2197和2196耦接到致动器2192和2194。如图所示,致动器2192和2194可以推动或拉动挡板2142。在这些操作期间,轴2197和2196在限定于外壳2190中的狭槽(例如狭槽2198)中来回滑动。这些狭槽的长度可以限制挡板2142的运动。虽然从图21的角度不容易看到,但挡板2144也以类似的方式(即,通过三个单独的轴)耦接到外壳2190以及致动器2191和2193。如图所示,挡板2142和2144包括由角弯曲部分开的两个大致直的边缘。然而,在其他实施例中,挡板2142和/或2144的边缘和/或弯曲部可以是弯曲的。类似地,在其他实施例中,挡板2142和2144可以是弯曲的而没有任何弯曲部。
133.在操作期间,挡板止动器2100可以停止培养板沿传送带2122和2124行进。例如,如图所示,挡板止动器2100已停止培养板2106。为了到达该位置,致动器2191和2192向外推动挡板2142和2144,并且致动器2193和2194向内拉动挡板2142和2144。结果,挡板2142和2144在相反方向上旋转并防止培养板2106进一步沿传送带2122和2124行进。可以执行类似的操作以准许培养板2106沿传送带2122和2124行进。例如,致动器2191和2192可以向内拉动挡板2142和2144,并且致动器2193和2194可以向外推动挡板2142和2144。有利地,这样的操作还可以防止沿传送带2122和2124行进的另一个培养板(未示出)通过挡板2142和2144。因此,当以这种方式操作时,一次只有单个培养板可以通过挡板2142和2144。
134.如上所述,在一些实施例中,挡板止动器2100可以代替上述任何自动化堆垛机和卸垛机的销和/或相关组件(例如销842、844、1142、1144、1442、1444、1642、1644、1742和1744)。在这样的实施例中,外壳2190可以被定位在那些系统的升降垫(例如升降垫334、
1134、1434、1634和1734)下面。此外,在这样的实施例中,可以增加将挡板2142和2144连接到外壳2190和致动器2191、2192、2193和2194的轴(例如,轴2195、2196和2197)的长度以补偿升降垫。
135.图22(a)-图22(c)示出了可单独使用或与上述任何自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300、1100、1400、1600和1700)组合使用的又一止动机构(即,挡板止动器2200)。例如,挡板止动器2200可以代替输送系统200中的止动机构242、244和/或246。作为另一个示例,挡板止动器2200可以代替上述任何自动化堆垛机和卸垛机的销和/或相关组件(例如,销842、844、1142、1144、1442、1444、1642、1644、1742、1744、1841、1842a和1844a)。
136.如图所示,挡板止动器2200包括挡板2241、外壳2290、致动器2291、引导结构2294、轴2296和轴2297。与图22(a)相比,外壳2290的一部分已在图22(b)和图22(c)中移除,以展现外壳2290内的一些组件,例如致动器2291。如图所示,致动器2291包括壳体(casing)2292和活塞2293。引导结构2292被耦接到活塞2293。在一些实施例中,致动器2291可以是音圈致动器。例如,致动器2291可以是动磁致动器或动圈致动器。在一些实施例中,致动器2291可以是气动致动器。如图所示,挡板2241通过轴2296可旋转地耦接到外壳2290。结果,挡板2241可以围绕由轴2296限定的轴线旋转。挡板2241也耦接到轴2297,轴2297延伸穿过引导结构2294的倾斜狭槽2295。如图所示,挡板2241包括由角弯曲部分开的两个大致直的边缘。然而,在其他实施例中,挡板2241的边缘和/或弯曲部可以是弯曲的。类似地,在其他实施例中,挡板2241可以是弯曲的而没有任何弯曲部。
137.在操作期间,活塞2293(以及因此引导结构2294)可以在图22(b)和图22(c)所示的两个位置之间摆动。由于轴2297延伸穿过引导结构2294的狭槽2295,因此活塞2293的摆动也将导致轴2297在与活塞2293的摆动方向大致垂直的方向上摆动。此外,由于轴2297被耦接到挡板2241,所以轴2297的摆动也将导致挡板2241围绕由轴2296限定的轴线旋转。
138.与挡板止动器2100非常相似,挡板止动器2200可以通过挡板2241的旋转来停止培养板沿输送轨道行进。例如,挡板2241可以在一个方向上旋转以停止进入的培养板,并且挡板2241可以在相反方向上旋转以释放该培养板。在一些实施例中,当挡板止动器2200以这种方式操作时,一次只有单个培养板可以通过挡板止动器2200。在一些实施例中,壁可以被定位成横跨输送轨道与挡板止动器2200相隔(参见例如图23(a)中挡板止动器2300相对于壁2309的位置)以稳定停止的培养板。在一些实施例中,第二挡板止动器可以被定位成横跨输送轨道与挡板止动器2200相隔。在一些这样的实施例中,第二挡板止动器可以以与挡板止动器2200大致相同的方式构造和/或操作。在一些实施例中,传感器(例如,光纤传感器)可用于确认培养板已被挡板止动器2200停止和/或释放。
139.图23(a)-图23(c)示出了可单独使用或与上述任何自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300、1100、1400、1600和1700)组合使用的又一止动机构(即,挡板止动器2300)。例如,挡板止动器2300可以代替输送系统200中的止动机构242、244和/或246。作为另一个示例,挡板止动器2300可以代替上述任何自动化堆垛机和卸垛机的销和/或相关组件(例如,销842、844、1142、1144、1442、1444、1642、1644、1742、1744、1841、1842a和1844a)。
140.如图所示,挡板止动器2300包括挡板2341、外壳2390、控制器2391、马达2392和偏
心臂2394。与图22(a)相比,外壳2390的部分或全部已经在图22(b)和图22(c)中移除,以展现外壳2390内的一些组件,例如控制器2391和马达2392。如图所示,马达2392通过圆盘2393耦接到偏心臂2394。在一些实施例中,马达2392是电动马达(例如ac马达、dc马达、步进马达等)。如图所示,挡板2341包括圆柱形延伸部2395和2396。此外,外壳2390包括互补的圆柱形凹槽(参见,例如,图22(b)中凹槽2398的透明图示),以用于接收延伸部2395和2396。结果,挡板2341可以围绕由延伸部2395和2396限定的轴线旋转。如图所示,挡板2341还包括凹槽2397,偏心臂2394的一部分延伸穿过凹槽2397。挡板2341还包括由角弯曲部分开的两个大致直的边缘。然而,在其他实施例中,挡板2341的边缘和/或弯曲部可以是弯曲的。类似地,在其他实施例中,挡板2341可以是弯曲的而没有任何弯曲部。
141.在操作期间,控制器2391可以控制马达2392旋转圆盘2393(并因此旋转偏心臂2394)。由于偏心臂2394延伸穿过挡板2341的凹槽2397,偏心臂2394的旋转还将导致挡板2341围绕由延伸部2395和2396限定的轴线旋转。在一些实施例中,控制器2391可以控制马达2392仅顺时针或逆时针旋转圆盘2393。在其他实施例中,控制器2391可以控制马达2392在顺时针和逆时针旋转圆盘2393之间交替。
142.与挡板止动器2100和2200非常相似,挡板止动器2300可以通过挡板2341的旋转来停止培养板沿传送带2322和2324行进。例如,挡板2341可以在一个方向上旋转以停止进入的培养板,并且挡板2341可在相反方向上旋转以释放该培养板。在一些实施例中,当以这种方式操作挡板止动器2300时,一次只有单个培养板可以通过挡板止动器2300。如图所示,壁2309可以被定位成横跨传送带2322和2324与挡板止动器2300相隔以稳定停止的培养板。然而,在其他实施例中,壁2309可以用第二挡板止动器代替。在一些这样的实施例中,第二挡板止动器可以以与挡板止动器2300大致相同的方式构造和/或操作。如图所示,传感器2376(例如,光纤传感器)可以用于确认培养板已由挡板止动器2300停止和/或释放。然而,在其他实施例中,传感器2376可以被省略或移动到不同的方位。
143.从前述内容并参考各种附图,本领域技术人员将理解,在不脱离本公开的范畴的情况下,还可以对本公开做出某些修改。例如,不同的夹持机构(例如图24所示的一个夹持机构)可被集成到上述任何自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300、1100、1400、1600和1700)中。如图所示,夹持机构2400包括底座2402、夹具2412、夹具2414、弹簧2422、弹簧2424、齿轮2432和齿轮2434。夹具2412包括臂2442和2444。夹具2414包括臂2446。如图所示,臂2442、2444和2446包括被配置为与齿轮2432和2434的齿啮合在一起的互补齿组。在操作期间,弹簧2422和2424将夹具2412和2424拉到闭合位置。然而,可以向例如夹具2414的臂2446施加相反的力以打开夹持机构2400。在一些实施例中,可以通过使用电动马达(例如,ac马达、dc马达、步进马达等)来施加相反的力。
144.作为另一示例,可以修改上述夹持机构(例如夹持机构310、1110、1410、1610和1710)的形状。在上面讨论的许多实施例中,夹持机构在四个不同的点处接触培养板。然而,在其他实施例中,夹持机构可以例如被配置为在三个不同的点处接触培养板。类似地,夹持机构可以例如被配置为在五个不同的点处接触培养板。此外,在上面讨论的许多实施例中,接触点沿由角弯曲部分开的大致直的边缘。然而,在其他实施例中,边缘和/或弯曲部可以是弯曲的。类似地,在其他实施例中,接触点可以沿单个弯曲边缘。此外,在一些实施例中,接触点可以包括安装到夹持机构的夹具上的辊子,以减少夹具和培养板之间的摩擦量。
145.作为又一个示例,可以将传感器添加到上述任何自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300、1100、1400、1600和1700)以检测进入的培养板的高度。例如,在一些实施例中,夹持机构(例如夹持机构310、1110、1410、1610和1710)可以被配置为夹持具有预定范围的高度的培养板。然而,通过包含被配置为检测进入的培养板的高度的传感器,可以扩大该范围。更具体地,从传感器获得的高度信息可用于调节夹持机构围绕培养板闭合处的高度。
146.作为又一示例,闸门止动器可以被包括在上述任何自动化样本处理系统中。例如,如图25所示,闸门止动器可以被包括在自动化样本处理系统2500中。如图所示,自动化样本处理系统2500包括主轨道2512、侧轨道2514、出口匝道捕获器2522、入口匝道捕获器2524、闸门止动器2530以及自动化堆垛机和卸垛机2542、2544、2546和2548。在操作期间,进入的培养板可以通过出口匝道捕获器2522从主轨道2512传送到侧轨道2514。一旦在侧轨道2514上,培养板可以在自动化堆垛机和卸垛机2542、2544、2546和2548之前的位置处由闸门止动器2530停止。可以这样做以防止进入的培养板干扰一个或多个其他培养板堆垛和/或卸垛。在一些实施例中,闸门止动器2530可以独立于自动化堆垛机和卸垛机2542、2544、2546和2548来控制。在其他实施例中,自动化堆垛机和卸垛机2542、2544、2546和/或2548中的一个或多个马达可用于控制闸门止动器2530。例如,控制自动化堆垛机和卸垛机2542、2544、2546和/或2548的销中的一个或多个的马达可用于控制闸门止动器2530。
147.作为又一示例,可以将推动器机构添加到上述自动化堆垛机和卸垛机的机柜(例如,机柜120a、130a、120b、130b、140b、150b、302和1102)中的一个或多个。推动器机构可用于自动将培养板堆垛推出机柜并推到工作台的板车上。在一些实施例中,推动器机构可以被配置为推动机柜中的所有培养板,除了由夹持机构夹持的底部培养板。在其他实施例中,夹持机构可以打开并且底部培养板可以通过升降垫提升,从而整个培养板堆垛可以通过推动器机构推出机柜。
148.作为又一个示例,上述任何自动化堆垛机和卸垛机(例如,自动化堆垛机和卸垛机300、1100、1400、1600和1700)可以被重新配置,使得培养板被储存在输送系统下面。例如,如图26(a)-图26(b)所示,自动化样本处理系统2600包括主轨道、侧轨道、自动化堆垛机和卸垛机2606以及载物台2608。主轨道包括传送带2601和2602。侧轨道包括传送带2603和2604。自动化堆垛机和卸垛机2606包括致动器2610、致动器2620和机柜2630。致动器2620可以提升或降低机柜2630中的培养板堆垛(例如培养板堆垛2644)。在堆垛操作期间,致动器2620可以提升或降低培养板堆垛,使得在培养板堆垛顶部的培养板的顶面与载物台2608的顶面大致齐平。此外,致动器2610能够滑动培养板(例如,培养板2642)离开侧轨道的传送带2603和2604并到培养板堆垛上。在卸垛操作期间,致动器2620可以提升或降低培养板堆垛,使得培养板堆垛的顶部的第二个培养板的顶面与载物台2608的顶面大致齐平。此外,致动器2610能够将培养板堆垛的顶部处的培养板滑动到侧轨道的传送带2603和2604上。
149.与上面讨论的一些实施例相比,图26(a)-图26(b)的实施例需要较少的精度,因为不需要将培养板夹持在预定的高度范围内。然而,在该实施例中,致动器被包括在容纳培养板堆垛的机柜中。因此,机柜更宽,占地面积更大。此外,图26(a)-图26(b)的实施例没有分开培养板的盖子和底座上的互锁边沿。因此,在卸垛操作期间可能需要施加相当大的力(例如,110牛顿)。
150.作为又一示例,以上讨论的任何输送系统(例如,输送系统110a、110b和200)可以被修改以包括捷径。例如,如图27所示,输送系统2700可以包括载物台1706、具有传送带2712和2714的主轨道2710、具有传送带2722和2724的侧轨道2720、具有传送带2732和2734的传送轨道2730、销2742、销2744、销2746、销2748、传送机构2750、传送机构2760和轮子2770。轮子2770被包括在输送系统2700中以弯曲主轨道2710、侧轨道2720和传送轨道2730的部分。在其他实施例中,轮子2770中的一个或多个可以添加或移除。
151.如图27所示,通过销2746和2748防止培养板2701进一步沿传送轨道2730行进,通过销2742和2744防止培养板2702进一步沿侧轨道2720行进,并且正通过传送机构2750从侧轨道2720传送培养板2703到传送轨道2730。传送机构2750包括臂2752、枢轴接头2754、柱2756和柱2758。如图所示,柱2756和2758接触培养板2703。此外,臂2752由枢轴接头2754支撑在超过培养板2703高度的高度。结果,培养板2703的一部分被定位在臂2752下面。当培养板2703以这种方式定位时,臂2752围绕枢轴接头2754顺时针旋转。臂2752的这种旋转导致柱2756和2758将培养板2703从侧轨道2720推到传送轨道2730。在一些实施例中,该过程可以涉及顺时针旋转臂2752直到它大致与侧轨道2720和/或传送轨道2730垂直(例如,在该位置的30度内)。
152.可以执行类似的操作以将另一个培养板(例如培养板2701)从传送轨道2730传送到侧轨道2720。例如,在将培养板2703传送到传送轨道2730之后,臂2752可以保持在与侧轨道2720和/或传送轨道2730大致垂直的位置,并且销2746和2748可以被降低到载物台2706下面。结果,培养板2701将沿传送轨道2730行进,直到它接触柱2756和2758。而培养板2701以这种方式定位,臂2752围绕枢轴接头2754逆时针旋转。臂2752的这种旋转导致柱2756和2758将培养板2701从传送轨道2730推到侧轨道2720。在一些实施例中,该过程可以涉及逆时针旋转臂2752直到它与侧轨道2720和/或传送轨道2730大致垂直。
153.在侧轨道2720和传送轨道2730之间传送培养板之后,臂2752可以旋转到其与侧轨道2720和/或传送轨道2730大致平行的中间位置。当臂2752处于该中间位置时,它不会干扰沿侧轨道2720和/或传送轨道2730行进的培养板。
154.传送机构2760可以以与传送机构2750大致相同的方式操作,以在主轨道2710和传送轨道2730之间传送培养板。此外,传送机构2760可以旋转到其与主轨道2710和/或传送轨道2730大致平行的中间位置。传送轨道2730、传送机构2750和传送机构2760共同提供用于在主轨道2710和侧轨道2720之间传送培养板的捷径。在包括多个模块的自动化样本处理系统中,该捷径可以通过减少在多个模块之间传送那些样品所花费的时间来加速生物样品的处理。
155.在其他实施例中,可以修改传送机构2750和/或2760的结构。例如,柱2758可以从传送机构2750移除。在这样的实施例中,传送机构2750可以被构造得很像出口匝道捕获器1850。作为另一个示例,可以将用于接触培养板的附加柱和/或结构添加到传送机构2750。作为又一个示例,可以修改传送机构2750的臂2752的形状。例如,臂2752可以弯曲得与出口匝道捕获器252或入口匝道捕获器254非常相似。
156.作为又一示例,上述任何机构可以被集成到图28(a)-图28(f)中所示的任何模块中。图28(a)示出了具有开口2812的双向公路模块2810。如图28(b)和图28(c)所示,开口2812可为多种不同机构提供接口。例如,自动化输出堆垛机2814或自动化堆垛机和卸垛机
2816可以通过接口2812耦接到模块2810。模块2810可以包括与输送系统200非常相似地构造和/或操作的输送系统。图28(d)示出了单向公路模块2820。模块2820可以仅包括单个输送轨道。图28(e)示出了90度转弯模块2830、t形交叉模块2840和180度转弯模块2850。模块2830可以包括具有90度转弯的一个或多个输送轨道。模块2840可以包括多个输送轨道之间的t形交叉。模块2850可以包括具有180度转弯的一个或多个输送轨道。图28(f)示出了捷径模块2860。模块2860可以包括与输送系统2700非常相似地构造和/或操作的输送系统。
157.虽然在附图中示出了本公开的若干实施例,但并不意在将本公开限制于此,因为意在使本公开在本领域允许的范畴内具有尽可能宽的范畴并且以同样方式阅读说明书。因此,以上描述不应被解释为限制性的,而仅仅是特定实施例的范例。本领域技术人员将设想在所附权利要求的范畴和精神内的其他修改。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。