1.本发明涉及单细胞穿刺技术,更具体地说是一种基于锤型微纳机器人的单细胞穿刺系统。
背景技术:
2.单细胞穿刺技术是临床诊断、药物研发、基因工程等研究与应用的关键技术前提。目前,针对单细胞穿刺大多仍停留在手动操作层面,利用机械夹持器、微吸管、穿刺针等实现。现有方法较大程度上依赖于操作人员的经验和熟练程度,操作精度低、失败率高且效率低,难以满足针对单一细胞的精准穿刺需求。微纳机器人是一种尺度小、可控性好、推重比大的微纳米执行器,能够实现在微小环境内的精准运动控制及复杂功能,尤其在生物医学领域有着广阔的应用前景。利用微纳机器人的高效驱动能力和灵活的可控性,作为微纳米尺度的穿刺针,作用于单一细胞的细胞膜,能够实现对单一细胞细胞膜的有效穿刺突破。然而,现有微纳机器人大多利用化学燃料或单一外物理场作为能量输入进行驱动,多依赖有毒有害燃料、寿命短、驱动能力弱、控制手段单一且可扩展功能有限,难以满足针对单一细胞细胞膜的穿刺需求。因此,如何提出一种基于微纳机器人的单一细胞穿刺方法,克服现有微纳机器人在单细胞穿刺方面的限制,同时针对该微纳机器人特征参数搭建其驱动控制系统是亟需解决的关键问题。
技术实现要素:
3.本发明的目的是提供一种基于锤型微纳机器人的单细胞穿刺系统,可以实现对于单一细胞细胞膜的有效穿刺突破。
4.本发明的目的通过以下技术方案来实现:
5.一种基于锤型微纳机器人的单细胞穿刺系统,包括锤型微纳机器人,还设置有驱动锤型微纳机器人进行旋转的磁场发生装置和驱动锤型微纳机器人进行运动的超声场发生装置;
6.所述锤型微纳机器人包括锤头和锤柄,锤头具有顺磁性;
7.所述锤头由氧化铁构成,锤柄由二氧化硅构成;
8.所述锤型微纳机器人由溶胶-凝胶工艺及化学沉淀工艺制备而成;
9.所述锤型微纳机器人自身结构具有非对称性;
10.所述磁场发生装置为三维亥姆霍兹线圈;
11.利用信号发生器产生正弦波信号,经功率放大器对信号进行放大后,作为信号源输入到亥姆霍兹线圈中,亥姆霍兹线圈提供旋转的磁场,驱动锤型微纳机器人表现出自转运动行为;
12.所述超声场发生装置为以铌酸锂为基底的叉指换能器,利用信号发生器产生高频正弦波信号,作为信号源输入到叉指换能器中;
13.所述叉指换能器将输入的高频正弦波信号转化为机械振动,并以平面超声波的形
式沿基底传播,锤型微纳机器人在叉指换能器提供的平面超声场作用下表现出水平运动行为;
14.采用微流道加工工艺加工聚二甲基硅氧烷微流道并与铌酸锂基底键合,为锤型微纳机器人细胞穿刺提供流体环境;
15.本发明的有益效果为:
16.通过溶胶-凝胶及化学沉淀工艺制备的锤型微纳机器人的锤柄部较细,使得微纳机器人在突破细胞膜过程中可获得更高的穿刺力;
17.制备的锤型微纳机器人能够同时对外部磁场及超声场进行响应,调节磁场及超声场参数可以控制锤型微纳机器人的运动状态,可以实现远程、可控的细胞穿刺功能;
18.微纳机器人由磁场及超声场耦合驱动,使得其具有更高的驱动能力和更大的推重比,使得微纳机器人更易突破单一细胞的细胞膜屏障;
19.利用锤型微纳机器人进行细胞穿刺可取代现有人工细胞穿刺手段,提高细胞穿刺精度及效率,极大节省人力物力。
附图说明
20.下面结合附图和具体实施方法对本发明做进一步详细的说明。
21.图1至4是本发明的锤型微纳机器人扫描电镜图及能谱图;
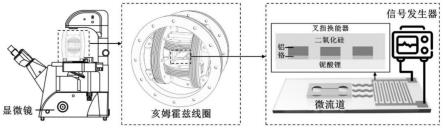
22.图5是本发明的锤型微纳机器人驱动控制系统示意图;
23.图6是本发明的锤型微纳机器人驱动机理示意图;
24.图7至10是本发明的锤型微纳机器人运动控制实验图;
25.图11至13是本发明的锤型微纳机器人细胞穿刺实验图。
具体实施方式
26.下面结合附图对本发明做进一步详细说明。
27.一种基于锤型微纳机器人的单细胞穿刺系统,包括锤型微纳机器人,还设置有驱动锤型微纳机器人进行旋转的磁场发生装置和驱动锤型微纳机器人进行运动的超声场发生装置;锤型微纳机器人包括锤头和锤柄,锤头具有顺磁性;
28.锤型微纳机器人的扫描电镜图及能谱图如图1至4所示,锤头由氧化铁构成,锤柄由二氧化硅构成,证明微纳机器人锤头为氧化铁,锤柄为二氧化硅;
29.由于锤型微纳机器人的锤头材料为氧化铁,具有顺磁性,在外加磁场作用下微纳机器人锤头的长轴即x轴,将始终与外加磁场方向保持平行。因此,当施加的磁场为平面旋转磁场时,微纳机器人在锤头的驱动下能够表现出自转运动行为;
30.同时,由于锤型微纳机器人自身结构具有非对称性,因此在水平超声场作用下能够以锤柄朝前的方式向声压梯度低的方向表现出水平运动行为;
31.所述锤型微纳机器人由溶胶-凝胶工艺及化学沉淀工艺制备而成,通过溶胶-凝胶及化学沉淀工艺制备的锤型微纳机器人的锤柄部较细,使得微纳机器人在突破细胞膜过程中可获得更高的穿刺力;
32.如图5至13所示,下面对磁场发生装置和超声场发生装置的结构和功能进行详细的说明;
33.如图5所示,利用倒置显微镜进行观察。三维亥姆霍兹线圈作为驱动控制系统的磁场发生装置,利用信号发生器产生正弦波信号,经功率放大器对信号进行放大后,作为信号源输入到亥姆霍兹线圈中,用以产生三向匀强磁场,利用三向匀强磁场中的两向进行组合可构成平面内匀强旋转磁场(20hz,3.71mt)。锤型微纳机器人在旋转磁场作用下将绕其长轴即z轴旋转并表现出自转运动行为。
34.叉指换能器作为驱动控制系统的超声场发生装置,通过在y-128
°
铌酸锂基底上依次沉积7纳米铬、200纳米铝及300纳米二氧化硅制成,利用信号发生器产生高频正弦波信号(100khz,10vpp),作为信号源输入到叉指换能器中。根据逆压电效应,叉指换能器将输入的高频电信号转化为机械振动,并以平面超声波的形式沿铌酸锂基底进行传播。锤型微纳机器人在叉指换能器产生的平面超声波作用下表现出水平运动行为。采用微流道加工工艺加工聚二甲基硅氧烷微流道并与铌酸锂基底键合,为锤型微纳机器人细胞穿刺提供流体环境。
35.锤型微纳机器人的驱动控制系统启动后,超声场发生装置产生平面超声波,推动锤型微纳机器人水平运动;磁场发生装置产生平面匀强旋转磁场,推动锤型微纳机器人绕自身长轴即z轴旋转;在两种物理场耦合作用下,锤型微纳机器人能够在水平快速运动的同时进行高频率自转,钻入靶向细胞中,实现对单一细胞的穿刺功能,如图6所示。
36.利用本发明提出的驱动控制系统,通过改变外部施加的物理场特征参数,能够实现对锤型微纳机器人运动行为的调控。改变超声场的超声幅值,可实现对锤型微纳机器人运动速度的控制。改变超声场的超声频率,可实现对锤型微纳机器人运动方向的控制,如图7至10所示,将锤型微纳机器人和鸡的血红细胞同时注入到微流道中,改变外物理场参数,控制锤型微纳机器人的运动速度和方向,可以有效实现对单一细胞的穿刺功能,如图11至13所示。
技术特征:
1.一种基于锤型微纳机器人的单细胞穿刺系统,包括锤型微纳机器人,其特征在于:还设置有驱动锤型微纳机器人进行旋转的磁场发生装置和驱动锤型微纳机器人进行运动的超声场发生装置。2.根据权利要求1所述的一种基于锤型微纳机器人的单细胞穿刺系统,其特征在于:所述锤型微纳机器人包括锤头和锤柄,锤头具有顺磁性。3.根据权利要求2所述的一种基于锤型微纳机器人的单细胞穿刺系统,其特征在于:所述锤头由氧化铁构成,锤柄由二氧化硅构成。4.根据权利要求1至3任一项所述的一种基于锤型微纳机器人的单细胞穿刺系统,其特征在于:所述锤型微纳机器人由溶胶-凝胶工艺及化学沉淀工艺制备而成。5.根据权利要求1至3任一项所述的一种基于锤型微纳机器人的单细胞穿刺系统,其特征在于:所述锤型微纳机器人自身结构具有非对称性。6.根据权利要求1所述的一种基于锤型微纳机器人的单细胞穿刺系统,其特征在于:所述磁场发生装置为三维亥姆霍兹线圈。7.根据权利要求6所述的一种基于锤型微纳机器人的单细胞穿刺系统,其特征在于:利用信号发生器产生正弦波信号,经功率放大器对信号进行放大后,作为信号源输入到亥姆霍兹线圈中,亥姆霍兹线圈提供旋转的磁场,驱动锤型微纳机器人表现出自转运动行为。8.根据权利要求1所述的一种基于锤型微纳机器人的单细胞穿刺系统,其特征在于:所述超声场发生装置为以铌酸锂为基底的叉指换能器,利用信号发生器产生高频正弦波信号,作为信号源输入到叉指换能器中。9.根据权利要求8所述的一种基于锤型微纳机器人的单细胞穿刺系统,其特征在于:所述叉指换能器将输入的高频正弦波信号转化为机械振动,并以平面超声波的形式沿基底传播,锤型微纳机器人在叉指换能器提供的平面超声场作用下表现出水平运动行为。10.根据权利要求9所述的一种基于锤型微纳机器人的单细胞穿刺系统,其特征在于:采用微流道加工工艺加工聚二甲基硅氧烷微流道并与铌酸锂基底键合,为锤型微纳机器人细胞穿刺提供流体环境。
技术总结
本发明涉及单细胞穿刺技术,更具体的说是一种基于锤型微纳机器人的单细胞穿刺系统,包括锤型微纳机器人,还设置有驱动锤型微纳机器人进行旋转的磁场发生装置和驱动锤型微纳机器人进行运动的超声场发生装置,锤型微纳机器人包括锤头和锤柄,锤头具有顺磁性,磁场发生装置为三维亥姆霍兹线圈,亥姆霍兹线圈提供旋转的磁场,驱动锤型微纳机器人表现出自转运动行为,所述超声场发生装置为以铌酸锂为基底的叉指换能器,利用信号发生器产生高频正弦波信号,作为信号源输入到叉指换能器中,叉指换能器提供水平的超声场,驱动锤型微纳机器人表现出水平运动行为;两种物理场耦合作用可以实现对于单一细胞细胞膜的有效穿刺突破。对于单一细胞细胞膜的有效穿刺突破。对于单一细胞细胞膜的有效穿刺突破。
技术研发人员:李隆球 庄仁诚 周德开 刘军民 岳红尔 王艺醇
受保护的技术使用者:哈尔滨工业大学
技术研发日:2022.08.15
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。