1.本发明涉及一种铸件锻造系统,属于铸件制备生产技术领域。
背景技术:
2.铸件,是用利用各种铸造方法并依赖各种锻造和锻件结构处理装置构成的锻造系统来获得的金属成型物件,即把冶炼好的液态金属,用浇注、压射、吸入或其它浇铸方法注入预先准备好的铸型中,冷却后经打磨等后续加工手段后,所得到的具有一定形状,尺寸和性能的物件。受铸造工艺的影响,其表面难免存有飞边等瑕疵。
3.上述的打磨问题,对于结构和形状较为规则的铸件通过人工打磨和现有的打磨装置都能够实现铸件的高效打磨,但对于具备不规则形状和结构的铸件其打磨的过程和步骤则相对复杂。
4.因此,针对结构较为复杂的铸件,大多根据铸件需要打磨的面以及面上存在的结构进行划分,然后一面一面的进行打磨,这其中对于铸件的夹持总是通过夹持遮挡其他面而暴露出先进行打磨的面以及面上的结构来实现,当然在一个打磨面上,也存在各种复杂的结构,需要不同角度的打磨头对一个面上的复杂结构进行同步的打磨,但本质上还是需要一个面一面的进行,那么夹持铸件的结构还需要能够进行铸件的翻转动作,当然也因为铸件的复杂外观结构,使得其无论是自动夹持还是手动夹持的夹持位置的确定都是较为困难的。
5.例如申请号为201510497126.9的申请文献,其通过设置于所述内机箱的上部的打磨辊、旋设于所述打磨辊的端部的第二电机、设置于所述主机架的上端的第一电机和旋设于所述第一电机上的打磨部件对磨削壳进行打磨,虽然其提供了多种打磨方式,但对于铸件的夹持以及铸件的角度调节并没有设计,因此其也暴露出对于规定的铸件其打磨是高效的,但是对于复杂的铸件的打磨则无法适应。
6.因此,有必要提出一种铸件锻造系统来解决上述的问题。
技术实现要素:
7.针对上述存在的技术不足,本发明的目的是提供一种铸件锻造系统,解决了现有技术中具备不规则形状和结构的铸件其打磨的过程和步骤则相对复杂,并难以进行打磨的技术问题。
8.为解决上述技术问题,本发明采用如下技术方案:本发明提供一种铸件锻造系统,包括打磨装置,所述打磨装置包括:
9.环形工装以及用于驱动所述环形工装进行圆周转动的驱动组件;
10.所述环形工装上设置有第一夹持组件和第二夹持组件,通过所述第一夹持组件和所述第二夹持组件共同夹持铸件,且在初始状态时将所述铸件夹持在所述环形工装内部圆心位置处;
11.其中,第一夹持组件和第二夹持组件均通过角度偏移组件安装在所述环形工装
上,所述角度偏移组件用于驱动所述第一夹持组件、第二夹持组件夹持所述铸件的位置发生远离或靠近所述环形工装所在的平面动作;
12.所述环形工装的两侧均设置有第一打磨组件,且所述第一打磨组件能够沿所述环形工装的轴向移动,所述第一打磨组件用于在所述驱动组件驱动所述环形工装转动的状态下对所述铸件的待打磨位置进行打磨。
13.优选地,所述环形工装包括固定环体和转动环体,所述转动环体同轴且转动安装在所述固定环体上,所述驱动组件用于驱动所述转动环体转动;
14.所述固定环体上设置有第二打磨组件,且所述第二打磨组件能够沿所述固定环体的径向移动;
15.所述第二打磨组件用于在所述驱动组件驱动所述环形工装转动的状态下对所述铸件的待打磨位置进行打磨。
16.优选地,所述第一打磨组件包括轴向驱动部、安装在所述轴向驱动部上的径向支撑部以及安装在所述径向支撑部远离所述轴向驱动部的端部的打磨部,且所述径向支撑部的高度可调;
17.其中,所述轴向驱动部用于驱动所述径向支撑部沿所述环形工装的轴向移动,使所述打磨部与所述铸件的待打磨部分接触。
18.优选地,所述打磨部包括座体以及安装在所述座体上的多个第一打磨头,且所述第一打磨头通过设置在所述座体表面的导向槽安装在所述座体上;
19.其中,多个所述导向槽在所述座体朝向所述环形工装的表面上呈环形阵列分布;
20.所述导向槽中设置有位置调节组件,所述位置调节组件用于调节所述第一打磨头在所述导向槽的位置。
21.优选地,所述角度偏移组件包括连接在所述环形工装内圈壁且与所述环形工装同心的杠杆环以及沿所述环形工装的径向,且转动连接在所述杠杆环上的支架板,所述支架板一端设置有伸缩件,所述伸缩件的输出端与所述支架板的端部铰接,所述支架板的远离所述伸缩件的另一端与所述第一夹持组件或第二夹持组件铰接;
22.所述伸缩件用于驱动所述支架板绕所述支架板与所述杠杆环连接处转动,使得所述第一夹持组件、第二夹持组件夹持所述铸件的位置发生远离或靠近所述环形工装所在的平面动作。
23.优选地,所述第一夹持组件和第二夹持组件的数量均为两个,第一夹持组件和所述第二夹持组件以所述环形工装的圆心对称设置在所述环形工装上;
24.且第一夹持组件和第二夹持组件的结构相同。
25.优选地,所述第一夹持组件包括钳形件,所述钳形件的外壁中间与所述角度偏移组件远离所述环形工装的端部转动连接,所述钳形件的两端内侧均设置有导向楔,所述导向楔穿过所述钳形件延伸至所述钳形件的外侧壁,且所述导向楔延伸出所述钳形件的端部转动连接有气压缸,所述气压缸用于驱动所述导向楔沿所述钳形件的端部移动,使所述导向楔对所述铸件施加沿所述钳形件两端连线方向上的作用力。
26.优选地,其中一组所述第一夹持组件和第二夹持组件的所述导向楔在所述气压缸的驱动下对所述铸件施加沿所述钳形件两端连线方向上的作用力与另一组第一夹持组件和第二夹持组件的所述导向楔在所述气压缸的驱动下对所述铸件施加沿所述钳形件两端
连线方向上的作用力相反。
27.优选地,所述第二打磨组件包括安装在所述固定环体上的导向座,所述导向座上设置有直线位移组件,所述直线位移组件上安装有角度转动组件,所述角度转动组件上安装有第二打磨头;
28.其中,所述直线位移组件用于驱动所述角度转动组件和第二打磨头的整体沿所述固定环体的径向移动;
29.所述角度转动组件用于实现所述第二打磨头的角度转动。
30.优选地,所述角度转动组件包括安装在所述直线位移组件上的固定盘座以及同轴转动安装在所述固定盘座上的第一转动盘座,所述第一转动盘座上通过平面涡卷弹簧同轴转动安装有第二转动盘座;
31.其中,所述第二打磨头安装在所述第二转动盘座的直径上;
32.所述固定盘座上设置有锁止螺母,通过转动所述锁止螺母使所述锁止螺母沿所述固定盘座的轴向依次与所述第一转动盘座、第二转动盘座连接或者脱离。
33.本发明的有益效果在于:本发明提供的多角度同步打磨装置能够实现对于较为复杂结构的铸件的多角度同步打磨,并且能够通过对称夹持和铸件的整体圆周转动来提供多个打磨位置同时提高打磨效率。
附图说明
34.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
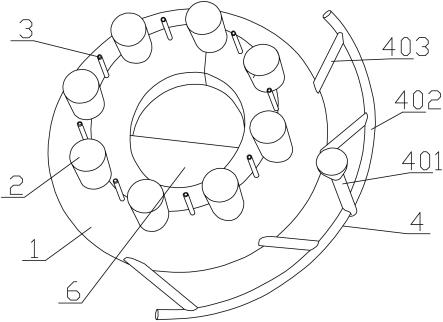
35.图1为本发明提供的铸件多角度同步打磨装置的一种优选实施方式的结构示意图;
36.图2为本发明提供的第二打磨组件和固定环体的装配的一种优选实施方式的结构示意图;
37.图3为本发明提供的第二打磨组件的一种优选实施方式的结构示意图;
38.图4为本发明提供的角度转动组件的一种优选实施方式的结构示意图;
39.图5为本发明提供的第一夹持组件或第二夹持组件的一种优选实施方式的结构示意图。
40.附图标记说明:
41.1-环形工装;2-驱动组件;3-第一夹持组件;4-第二夹持组件;5-角度偏移组件;6-第一打磨组件;7-第二打磨组件;
42.101-固定环体;102-转动环体;
43.31-钳形件;32-导向楔;33-气压缸;
44.51-杠杆环;52-支架板;53-伸缩件;
45.61-轴向驱动部;62-径向支撑部;63-打磨部;
46.631-座体;632-第一打磨头;633-导向槽;634-位置调节组件;
47.71-导向座;72-直线位移组件;73-角度转动组件;74-第二打磨头;
48.731-固定盘座;732-第一转动盘座;733-平面涡卷弹簧;734-第二转动盘座;735-锁止螺母;736-螺纹孔;737-调节螺栓;738-螺杆。
具体实施方式
49.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
50.在现有技术中,对于结构和形状较为规则的铸件通过人工打磨和现有的打磨装置能够实现铸件的高效打磨,但对于具备不规则形状和结构的铸件其打磨的过程和步骤则相对复杂。
51.因此,针对结构较为复杂的铸件,大多根据铸件需要打磨的面以及面上存在的结构进行划分,然后一面一面的进行打磨,这其中对于铸件的夹持总是通过夹持遮挡其他面而暴露出先进行打磨的面以及面上的结构来实现,当然在一个打磨面上,也存在各种复杂的结构,需要不同角度的打磨头对一个面上的复杂结构进行同步的打磨,但本质上还是需要一个面一面的进行,那么夹持铸件的结构还需要能够进行铸件的翻转动作,当然也因为铸件的复杂外观结构,使得其无论是自动夹持还是手动夹持的夹持位置的确定都是较为困难的。
52.当然,无论是手动打磨还是机器打磨其前提是对于铸件的外观进行的分析,而以有限元分析分析结合三维坐标定位分析来说(铸件的质心位于三维坐标系的原点),使对于铸件的夹持作用点处于某两个坐标轴所确定的平面内(以x、y轴为例),并以坐标系原点进行对称分布,则能够实现铸件稳定夹持,那么处于除了确定平面的两个坐标轴的第三个坐标轴(z轴为例)内的铸件的结构都是可以暴露出来被进行打磨的。
53.因此,为了解决上述中的问题,如图1所示,本发明提供一种铸件锻造系统,包括打磨装置,所述打磨装置包括:
54.环形工装1以及用于驱动环形工装1进行圆周转动的驱动组件2;
55.本发明中通过环形工装1来构建铸件的夹持平面,并通过在环形工装1上设置第一夹持组件3和第二夹持组件4对铸件进行对称夹持,且在初始状态时将铸件夹持在环形工装1内部圆心位置处,也就是尽量将铸件的质心保持在环形工装的圆心位置上,当然对于铸件的夹持是需要根据具体的铸件进行具体的设计。
56.其中,铸件的待打磨结构以连续的点、线以及面组成的结构为例:
57.当铸件的结构在平面上的投影为点,那么打磨组件沿z轴的位移(当然需要调节该点与坐标系原点之间的位置)即可实现铸件的打磨;
58.当铸件的结构在平面上的投影为线(分为直线和曲线),如果是直线,则需要铸件在平面内转动以及打磨组件的高度的同步调节,这其中如果曲线的弧度是以坐标系原点为圆心的话,那么只需要固定打磨组件的高度,铸件在平面内转动即可,但如果曲线的弧度不是以坐标系原点为圆心的话,则也需要铸件在平面内的转动以及打磨组件的高度调节的同步动作。
59.当铸件的结构在平面上的投影为面,则需要铸件在平面内转动以及打磨组件的高
度以及打磨组件与平面之间的相对位移的三者的同步或者任意两者组合调节的方式。
60.进一步地,还包括当铸件的结构在平面的纵截面上的投影为弧形或抛物线,这种则需要铸件整体以铸件的质心进行转动,使得铸件的质心保持在平面内,铸件的整体和平面产生夹角,同时叠加铸件在平面内转动、打磨组件的高度以及打磨组件与平面之间的相对位移的四者的同步或者任意三者组合、两者组合的同步调节的方式。
61.那么使得铸件在某两个坐标轴所确定的平面内绕坐标系原点进行圆周转动,则能够实现铸件的一些曲度或者弧度结构的打磨,为此,第一夹持组件3和第二夹持组件4均通过角度偏移组件5安装在环形工装1上,角度偏移组件5用于驱动第一夹持组件3、第二夹持组件4夹持铸件的位置发生远离或靠近环形工装1所在的平面动作。
62.补充说明地是,第一夹持组件3和第二夹持组件4是一一对应的,也就是说,第一夹持组件3对于铸件的夹持位置和第二夹持组件4夹持铸件的位置是相对于环形工装1的圆心处相对对称的(由于铸件的复杂结构,这种对称没有绝对性)。
63.环形工装1的两侧均设置有第一打磨组件6,且第一打磨组件6能够沿环形工装1的轴向移动,第一打磨组件6用于在驱动组件2驱动环形工装1转动的状态下对铸件的待打磨位置进行打磨。
64.这其中,包括两种打磨状态:
65.一是、当第一夹持组件3的角度偏移组件5和第二夹持组件4的角度偏移组件5的动作方向相同,则使得铸件整体沿环形工装1的轴向位移,使得铸件凸出环形工装1,实现与第一打磨组件6的轴向位移时的主动接触(与环形工装1的某一侧的第一打磨组件6进行接触);
66.二是、当第一夹持组件3的角度偏移组件5和第二夹持组件4的角度偏移组件5的动作方向相反,则使得铸件整体进行翻转(以环形工装1的圆心为转动原点),也就是上述的平面和环形工装1所在的平面之间产生角度,这时候夹持的铸件均有凸出环形工装1的部分,环形工装1两侧的第一打磨组件6靠近铸件,对凸出环形工装1的部分的待打磨位置进行打磨。
67.以上两种打磨状态中,均可以叠加驱动组件2驱动环形工装1的圆周转动或者往复的圆周转动。
68.由于,第一打磨组件6只能演环形工装1的轴向(相当于上述中的三维坐标系中的z轴方向)进行打磨动作,本发明中在两种打磨状态中,对于处于环形工装1平面内的未被夹持的铸件的部分也能够进行打磨。
69.为此,本发明进一步地提供一种环形工装1的具体实施例,环形工装1包括固定环体101和转动环体102,转动环体102同轴且转动安装在固定环体101上,驱动组件2用于驱动转动环体102转动;
70.固定环体101上设置有第二打磨组件7,且第二打磨组件7能够沿固定环体101的径向移动,优选地,安装在固定环体101的顶部。第二打磨组件7用于在驱动组件2驱动环形工装1转动的状态下对铸件的待打磨位置进行打磨。
71.现有中,对于铸件的打磨需要根据具体的铸件结构确定打磨头,为了清楚的说明本发明中的工作原理,第一打磨组件6包括轴向驱动部61、安装在轴向驱动部61上的径向支撑部62以及安装在径向支撑部62远离轴向驱动部61的端部的打磨部63,且径向支撑部62的
高度可调,也就是说径向支撑部62具体可以是滑轨结构,并通过丝杠-丝杠螺母副、气压缸、液压缸或直线电机(轴向驱动部61为其中的任意一种)作为驱动部件的滑轨结构;其中,轴向驱动部61用于驱动径向支撑部62沿环形工装1的轴向移动,使打磨部63与铸件的待打磨部分接触。
72.打磨部63包括座体631以及安装在座体631上的多个第一打磨头632,且第一打磨头632通过设置在座体631表面的导向槽633安装在座体631上,这其中,第一打磨头632主要包括两部分电机以及打磨头,电机驱动打磨头转动从而进行打磨作业。
73.其中,轴向驱动部61只能够控制第一打磨头632与铸件之间的轴向距离(z轴方向上的距离),但在所述的平面内同时存在多个需要打磨的位置时(利入铸件的待打磨面上存在多个位于同一平面上的待打磨结构),多个导向槽633在座体631朝向环形工装1的表面上呈环形阵列分布。
74.本发明中的导向槽633中设置有位置调节组件634,位置调节组件634用于调节第一打磨头632在导向槽633的位置,从而实现第一打磨头632在导向槽633中的位置。
75.针对于铸件的待打磨位置相对固定且清楚,可以通过手动调节第一打磨头632的位置,那么位置调节组件634可以采用丝杠螺母副组件;
76.如果针对于自动化控制调节,那么位置调节组件634则可以是液压缸或者气压缸以及直线电机。
77.当然,在需要更精准的位置调节需求时,本发明有意于将座体631和径向支撑部62进行可控的转动连接,来获得第一打磨头632更多的位置调节。
78.本发明中为了清楚明白的说明角度偏移组件5的工作原理,提供一种角度偏移组件5的具体实施方式,包括连接在环形工装1内圈壁且与环形工装1同心的杠杆环51以及沿环形工装1的径向,且转动连接在杠杆环51上的支架板52,支架板52一端设置有伸缩件53,伸缩件53的输出端与支架板52的端部铰接,支架板52的远离伸缩件53的另一端与第一夹持组件3或第二夹持组件4铰接。所述伸缩件53具体为气压缸。
79.在上述环形工装1的实施方式下,杠杆环51与转动环体102连接,伸缩件53安装在转动环体102上,转动环体102上设置有供伸缩件53进行行程驱动的开槽(沿转动环体102的轴向)。伸缩件53用于驱动支架板52绕支架板52与杠杆环51连接处转动,使得第一夹持组件3、第二夹持组件4夹持铸件的位置发生远离或靠近环形工装1所在的平面动作。
80.如图2和图3所示,在本发明中,虽然通过第一夹持组件3和第二夹持组件4实现对铸件进行夹持,但对于夹持过程后,角度偏移组件5对于第一夹持组件3和第二夹持组件4驱动转动的过程中会使得第一夹持组件3和第二夹持组件4对于铸件的夹持的力臂发生变化(力矩变小),并且在第一打磨组件和第二打磨组件对于铸件打磨过程中也会对铸件进行受力,因此为了避免在前文中两种打磨状态下的铸件夹持稳定提供两种具体的实施方式,这其中,第一夹持组件3和第二夹持组件4的结构相同:
81.第一,第一夹持组件3和第二夹持组件4的数量均为两个,第一夹持组件3和第二夹持组件4以环形工装1的圆心对称设置在环形工装1上,也就是说通过多组共同夹持的方式。
82.第二,如图5所示,提供第一夹持组件3的具体实施方式,第一夹持组件3包括钳形件31,钳形件31的外壁中间与角度偏移组件5远离环形工装1的端部转动连接,钳形件31的两端内侧均设置有导向楔32,导向楔32穿过钳形件31延伸至钳形件31的外侧壁,且导向楔
32延伸出钳形件31的端部转动连接有气压缸33,气压缸33用于驱动导向楔32沿钳形件31的端部移动,使导向楔32对铸件施加沿钳形件31两端连线方向上的作用力。
83.也就是说,在角度偏移组件5驱动第一夹持组件3和第二夹持组件4发生角度偏移后,利用气压缸33驱动导向楔32增加对铸件的夹持力。
84.本发明中,其实在对铸件的夹持过程中,其中一组第一夹持组件3和第二夹持组件4的导向楔32在气压缸33的驱动下对铸件施加沿钳形件31两端连线方向上的作用力与另一组第一夹持组件3和第二夹持组件4的导向楔32在气压缸33的驱动下对铸件施加沿钳形件31两端连线方向上的作用力相反。
85.进一步地,本发明具体提供了第二打磨组件7的一种实施例,包括安装在固定环体101上的导向座71,导向座71上设置有直线位移组件72,直线位移组件72上安装有角度转动组件73,角度转动组件73上安装有第二打磨头74;
86.其中,直线位移组件72用于驱动角度转动组件73和第二打磨头74的整体沿固定环体101的径向移动;
87.角度转动组件73用于实现第二打磨头74的角度转动。
88.本发明实施例中,现有的能够驱动第二打磨头74进行转动的角度转动组件73结构有很多,以最基本的手动进行调节,那么角度转动组件73(例如圆盘结构)即可以通过转轴安装在直线位移组件72上,配合设置有能够对角度转动组件73转动后的位置进行锁定的结构;如果涉及自动化控制的话,那么角度转动组件73可以是伺服电机/舵机。
89.但无论何种方式,其对于第二打磨头74与铸件之间的接触都是硬性接触,在本发明中的铸件是在驱动组件2的驱动下进行圆周转动的状态来说,第二打磨头74如果和铸件待打磨的部分是绝对的硬性接触(直线位移组件72调节第二打磨头74至铸件和打磨头的相对打磨位置处),其对于铸件复杂边缘结构处打磨的适应性则不太友好,也就是说第二打磨头74对于铸件的打磨相对于切削的过程,当然对于飞边的结构较硬或者厚度、宽度较大时,其适用于硬性的接触方式;但当需要对打磨的部分进行飞边边缘的适应,硬性接触的方式显然无法满足。
90.为此,如图4所示,本发明中提供一种角度转动组件73,包括安装在直线位移组件72上的固定盘座731以及同轴转动安装在固定盘座731上的第一转动盘座732,第一转动盘座732上通过平面涡卷弹簧733同轴转动安装有第二转动盘座734;其中,第二打磨头74安装在第二转动盘座734的直径上。
91.那么对于第二转动盘座734发生转动后,对于其位置的固定和锁止上,固定盘座731上设置有锁止螺母735,通过转动锁止螺母735使锁止螺母735沿固定盘座731的轴向依次与第一转动盘座732、第二转动盘座734连接或者脱离,当锁止螺母735转动完全脱离第一转动盘座732和第二转动盘座734后,则能够进行第一转动盘座732相对于固定盘座731的相对转动(也就是进行第二打磨头74的角度转动),当第二打磨头74的转动角度固定后,通过锁止螺母735连接第一转动盘座732,也就使得第一转动盘座732相对于固定盘座731固定,这时候,由于第二转动盘座734是通过平面涡卷弹簧733第一转动盘座732,由于平面涡卷弹簧733能够提供弹性势能和周向转动力矩之间的转换,那么当第二打磨头74的打磨部和铸件的结构接触时,第二打磨头74在竖直方向的重力会使得第二打磨头74和铸件紧密接触,当铸件整体转动时,铸件对第二打磨头74施加相对与重力的反作用力,这个过程中即完成
平面涡卷弹簧733的弹性势能和周向转动力矩之间的转换,这个过程能够使得第二打磨头74和铸件的待打磨位置的适应性接触。
92.当然,当需要第二打磨头74和铸件的硬性接触时,则继续转动锁止螺母735,使得锁止螺母735和第二转动盘座734连接,从而锁止固定盘座731、第一转动盘座732和第二转动盘座734。
93.即,固定盘座731、第一转动盘座732以及第二转动盘座734三者均为盘状结构,且三者同轴贴合在一起,第一转动盘座732以及第二转动盘座734能够相对于固定盘座731进行转动。
94.本发明中的锁止螺母735包括螺杆738,以及设置在固定盘座731上的调节螺栓737,其中调节螺栓737和螺杆738之间通过蜗轮蜗杆连接,通过转动调节螺栓737,通过蜗轮蜗杆驱动螺杆738转动,这其中,第一转动盘座732上环形阵列有螺纹连接所述螺杆738的螺纹孔736,螺杆738沿螺纹孔736轴向移动。
95.进一步补充说明地是,本发明中的第一打磨头632和第二打磨头74的整体结构上是相同的,在广义上包括打磨头以及驱动打磨头转动的电机,由于实际的打磨需要,第一打磨头632和第二打磨头74的具体结构本发明不做过多解释说明。
96.进一步补充说明地是,本发明中的驱动组件2包括驱动电机、减速器和齿条,齿条设置在转动环体102的侧边或者周向表面上,与减速器的输出端啮合,驱动电机连接所述减速器用于向所述减速器输出动力。
97.进一步补充说明地是,本发明中的直线位移组件72优选为丝杠螺母副传动组件。
98.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。