空气净化机及过程
1.相关申请引用
2.本技术是于2020年2月14日提交的美国专利申请第16/792,159号的部分申请延续案,以下称为
‘
159申请。
‘
159申请是于2018年12月22日提交的美国专利申请第16/231,396号的部分申请延续案(以下称为
‘
396申请)。本技术也是于2018年12月22日提交的美国专利申请第16/231,396号的部分申请延续案。
‘
396申请是要求于2018年7月27日提交的临时申请第62/711,297号和于2017年12月22日提交的临时申请第62/610,092号的优先权的非临时申请。所有这些申请的公开内容通过引用整体并入本文。
背景技术:
3.至少一个实施例包括空气净化机,该空气净化机包括:至少一个壳体和布置在该壳体中的多个芯。所述芯可以彼此偏移地布置,以促进与生物反应性溶液的更大相互作用。
技术实现要素:
4.至少一个实施例涉及一种空气净化机,该空气净化机包括至少一个壳体和多个芯,其中每个芯布置在壳体中。在壳体中还布置有至少一个风扇。此外,在壳体中布置有至少一个泵,其中所述泵配置成使流体在壳体内循环。
5.所述芯包括布置在壳体内的至少两个芯,包括第一芯和第二芯,其中所述第二芯布置在所述第一芯内,并且其中所述第二芯与所述第一芯不同心。所述芯的不同心特性在这两个芯彼此最靠近的位置产生压缩位置。这个压缩位置为所述芯周围的气流产生更高压力的位置。用于使空气在芯之间循环的不同尺寸的开口产生空气湍流,这导致进入空气与空气净化系统内的生物反应性流体溶液之间的更大的相互作用。
6.在一个实施例中,所述第二芯在壳体中邻近所述第一芯布置,使得第二芯和第一芯一起与循环空气形成文丘里效应。在一个实施例中,所述第二芯具有多个布置在该芯的至少一侧的孔。
7.在至少一个实施例中,所述第一芯的直径大于所述第二芯的直径。在至少一个实施例中,设有用于接收流体的至少一个托盘。在至少一个实施例中,所述托盘包括顶部和底部段。
8.在至少一个实施例中,所述托盘的底部段具有多个孔。
9.在至少一个实施例中,设有耦接至泵的通道,其中所述通道从第一芯和第二芯的底部段向上延伸至托盘。在至少一个实施例中,所述通道包括管。沿着该管可以设有耦接至该管的至少一个阀门,其中所述阀门配置成切断管中的流体的流动。在所述壳体中布置有至少一个微处理器,其中所述至少一个微处理器配置成控制所述泵。在至少一个实施例中,设有进水口和至少一个阀门,其中所述至少一个微处理器配置成控制所述至少一个阀门,以有选择性地允许水进入容器。在至少一个实施例中,所述微处理器配置成控制至少一个阀门(例如双电磁阀),以有选择性地允许水进入容器内。
附图说明
10.通过下文的详细说明并结合公开本发明的至少一个实施例的附图,本发明的其它目的和特点将变得更加明显。但是应理解,附图仅是示例性的,而不是对本发明的限制。
11.在所有附图中,相似的附图标记表示相似的元件:
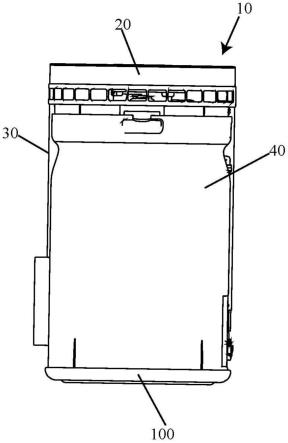
12.图1是空气净化机的侧视图;
13.图2a是空气净化机的顶部的侧视图;
14.图2b是空气净化机在容器盖被移除之后的侧视图;
15.图2c是空气净化机的容器盖的侧视图;
16.图2d是不带容器盖和容器的装置的侧视图;
17.图3a是容器的俯视图;
18.图3b是容器、外芯、内芯和托盘的下部的俯视图;
19.图3c是容器盖的俯视图;
20.图4a是容器盖的侧视图;
21.图4b是盖和外芯的侧视图;
22.图4c是容器的侧视图;
23.图5a是流体输送系统和空气净化机的顶部的侧视图;
24.图5b是流体输送系统、顶部、流体输入系统以及液位系统的侧视图;
25.图5c是图5b所示的视图的仰视图;
26.图5d是图5a和5b所示的视图的另一个侧视图;
27.图6a是容器盖的侧视图;
28.图6b是外芯的侧视图;
29.图6c是容器的侧视图;
30.图6d是内芯的侧视图;
31.图7是容器内的内芯的侧视图;
32.图8是容器、外芯和内芯的透视侧横截面图;
33.图9a是容器、外芯和内芯的俯视图;
34.图9b是内芯的仰视图;
35.图9c是容器的俯视图,示出了气流模式的一个实例;
36.图10是托盘的顶部透视图;
37.图11是托盘的仰视图;
38.图12a是托盘的侧横截面图;
39.图12b是托盘的另一个侧横截面图;
40.图13是托盘的底部的透视图;
41.图14是托盘的底部段的俯视图;
42.图15a是空气净化装置的电气部件的示意性框图;
43.图15b是多个空气净化装置的网络布局;
44.图15c是至少一台计算机的示意性框图;
45.图15d是至少一个手持设备的示意性框图;
46.图16是用于在夜间模式中运行机器的过程的流程图;
47.图17是生物药剂加药的流程图;
48.图18是数据驱动的空气净化机控制的过程;
49.图19示出了根据需要监控空气质量和控制多个空气净化机的网络以降低污染物水平的过程;
50.图20a是空气净化机的顶部的侧视图;
51.图20b是空气净化机的顶部的另一个侧视图;
52.图21是空气净化机的顶部的另一个侧视图;
53.图22是空气净化机的顶部的分解侧视图;
54.图23是空气净化机的顶部的横截面图;
55.图24a是散布器的视图;
56.图24b是散布器的视图;和
57.图25是散布器的视图。
具体实施方式
58.图1是空气净化机的侧视图。例如,如图所示,该装置的侧视图示出了包括顶部20、盖30和外容器40的装置/系统10,其中顶部20、盖30和外容器40形成壳体。在至少一个实施例中,所述壳体可以是顶部20、盖30和/或容器40中的任何一个。还设有底部100,该底部100被构造成固定底部或配置成随着壳体在边缘上旋转而旋转的滚动底部。
59.图2a是空气净化机的顶部的侧视图,其中该顶部具有顶部托盘段22和底部托盘段26。(更多细节请参考图11-14)。
60.图2b是所述空气净化机在盖被移除后的侧视图,在该视图中,设有容器40或在顶部带有盖30的罐。所述罐具有布置在其中的弯曲部42(参见图4c)。在其中布置有入口或循环管124。还设有布置在容器40下方的可旋转底部100。
61.图2c是空气净化机的容器盖30的侧视图,在该视图中,容器盖还设有凹口32。
62.图2d是不带盖和容器的装置的侧视图,该视图示出了容器盖、以及外芯50、内芯60和循环系统。
63.图3a是容器40的俯视图,而图3b是容器、外芯50、内芯60和托盘26的下部的俯视图。图3c也是盖30的俯视图。
64.图4a是容器盖30的侧视图,该容器盖30具有凹口32。图4b是顶部20和外芯50的侧视图。图4c是具有凹口42的容器40的侧视图。
65.图5a是流体输送系统和空气净化机的顶部的侧视图。在此视图中,示出了顶部20以及循环组件120。在循环组件的底部设有泵121,该泵121具有泵入口122。诸如水以及生物药剂等流体被吸入泵入口122,然后被向上吸入入口管124,通过阀门125,通过顶部连接器127,然后从第一流出管126或第二流出管128流出。所述第一流出管和所述第二流出管通入所述盖的相应托盘中。另外,在邻近循环组件120的位置布置有水位传感器140,该水位传感器140具有多个浮子。
66.图5b是流体输送系统、顶部、流体输入系统以及液位系统的一个实施例的侧视图。例如,示出了顶部20、具有顶部连接器127的循环组件120、以及阀门125。还示出了出口管124、以及泵入口122和泵121。此外,还设有进水口130,该进水口130包括进水口开口132、以
及电磁阀壳体134内的至少一个或更多个电磁阀(212、214)。在至少一个实施例中,设有两个电磁阀。这些阀门有选择性地通入供液管135。还设有多个弯头136和138,这些弯头使所述管弯曲,以朝下向托盘中供液。
67.还设有水位传感器140,该水位传感器140被示为具有支撑件或杆142、以及多个不同的浮子传感器,包括第一浮子传感器141、第二浮子传感器144、第三浮子传感器145、第四浮子传感器146、以及塞子147和148。
68.还设有至少两个可选的机械浮子或传感器,该机械浮子或传感器配置成在浮子传感器系统140发生故障的情况下自动关闭进水口。例如,设有第一机械液位传感器,例如机械浮子139,该第一机械液位传感器包括阀门,并且配置成将从供水管135进入容器40的供水开口自动地机械关闭。此外,还设有另一个机械浮子传感器,该机械浮子传感器包括机械浮子,如机械浮子149所示。机械浮子149包括支柱或支撑件149.1以及两个独立的机械浮子149.2和149.3。第一浮子149.2是机械故障安全浮子,其中在流体过高时,该浮子漂浮起来,并切断电磁阀壳体134内的电磁阀(例如电磁阀212和214(参见图15a))的供电。第二浮子149.3配置成在液位过高时发出警报,例如是警报器207,该警报器207可以结合到壳体中或者远离壳体,并且以有线或无线方式与控制器通信。
69.图5c是图5b所示的视图的仰视图。此视图示出了风扇150,该风扇150位于顶盖20中,并位于第一流出管126和第二流出管128附近。
70.图5d是图5a和5b所示的视图的另一个侧视图。在此视图中,示出了循环组件以及水位传感器140,该水位传感器140包括电极142、浮子传感器141、144、145和146以及塞子148。此外,该视图还示出了进水口130。
71.图6a是盖30的侧视图,而图6b是外芯50的侧视图。图6c是容器40的侧视图。在此视图中,容器示出了生物反应性溶液的大约40w的填充水平,该溶液包含与水混合的生物反应性药剂。该生物反应性溶液然后被泵送至顶盖20,从而该流体随后向下溢出外芯50的内壁以及内芯60的内壁和外壁。图6d是内芯60的侧视图。如该视图所示,内芯具有多个不同的开口,在至少一个实施例中,所述开口是多个圆形开口,包括开口62、64、66和68。此外,在开口68的对面还设有另一个开口61。
72.图7是容器40内的内芯的侧视图。例如,所示的内芯60具有开口62、64、66和68以及侧开口63和相对的开口61。
73.图8是容器、外芯和内芯的透视侧横截面图。在此视图中,示出了容器40、以及外芯50和内芯60。对于容器40,示出了弯曲部42以及凹口43。容器40包括抬高的底部段47,该底部段被竖直底部段47.1和47.2抬高。示出了具有主体段51、第一开口52、第二开口54和第三开口56的外芯50。还设有朝向顶部区域布置的缺口55。这些开口52、54、56与内芯60上的开口相对地布置。还设有一个附加开口53,它与开口52、54和56相对地布置。此外,在底部区域中,设有升高的底面57、以及从第一底部段57.1升高至上底部段57的基本上竖直升高的表面。该外芯还具有用于接合第一底部段57.1和上底部段57的基本上竖直的段58和59。
74.内芯60也包括多个不同的开口。例如,设有壳体部分61以及多个开口,包括第一上开口62、第二开口64、第三开口66,其中这些开口与开口52、54和56相对地布置。此外,内芯60还包括邻近开口62、64、66和68.1布置的开口63。还设有一个相对地间隔开的开口68.2。虽然这些开口被示为半圆形,但是这些开口实际上是圆形的或基本上是椭圆形的,但是这
些开口也可以是任何适当形状。
75.图9a是容器40、外芯50和内芯60的俯视图。该俯视图示出了凹口60.1,该凹口60.1向内弯曲,并用于允许入口管124在其中向上延伸。如该视图所示,外芯50被示为围绕内芯60延伸。此外,示出了由箭头71、72和73所示的不同距离。例如,如图所示,诸如空气等气体物质的流体在内芯周围并在内芯60与外芯50之间流动。在所述流体在内芯60周围流动时,空气在区域71中被压缩,并且开口在区域72中逐渐变大,在区域73中甚至更大。开口的变窄以及随后的最终扩大产生了文丘里效应,这进一步促进了空气与生物药剂溶液之间的相互作用。所述不同距离(例如距离71、72和73)配置成产生湍流,这导致外芯50与内芯60之间的相互作用增加。
76.图9b是内芯60的仰视图。该视图示出了具有开口63、65以及68.1和68.2的底板69。
77.图9c是容器的俯视图,示出了气流模式的一个实例。对于这种设计,示出了容器40、外芯50和内芯60。在内芯60基本上最靠近外芯50的区域中,这产生了更窄的开口,该开口产生空气湍流,如箭头77、78和79所示。最终,这种逐渐变窄然后邻近变窄段的体积膨胀对于通过该变窄区域的空气产生了文丘里效应,从而产生了不同的相互作用更强的气流。在变窄的区域中,这些更加湍急的气流产生了增强的相互作用。此外,在体积或空间变窄的区域中,空气压力的增大导致该区域中的压力的短期上升,这也促进了空气与生物反应性溶液之间的更大的相互作用。
78.图10是包括顶部托盘22和底部托盘26的托盘或盖30的顶部透视图。还设有凹入到顶部托盘22中的凹入部分24。
79.如图11所示,顶部托盘22被示为耦接至底部托盘26,在底部托盘26中示出了开口25。入口管124(参见图5a-5c)配置成将诸如水和与水混合的专有生物药剂等流体供应到底部托盘26中。
80.图12a是托盘的侧横截面图,示出了顶部组件20的顶部托盘22和底部托盘26。
81.图12b是包括顶部托盘22和底部托盘26的顶部组件20的另一个侧横截面图。在该视图中,示出了配置成接收内芯60的轨道23、以及配置成接收外芯50的外缘23.1。
82.图13和14是托盘26的底部的透视图和底部托盘26的俯视图。在这两个附图中,示出了内壁27、以及内壁27的凹入部分27.1。还设有另一个从底面26.7向上延伸的壁25。底部托盘26包括第一凹口26.1和第二凹口26.2。底盘26包括多个孔26.5,这些孔形成用于向内芯60的侧面中供液的一圈内孔。此外,底部托盘26还包括配置成向外芯50的顶部内供液的多个孔26.6。图14还示出了托盘26的底部段的相对地间隔的凹口26.4。
83.图15a是空气净化装置的电气部件的示意性框图。在该视图中,示出了包括主板201的控制器系统200。微处理器202耦接至主板201。微处理器202还与存储器204通信。此外,风扇206(也可以是风扇150)和收发器208也与微处理器202通信。此外,泵210(也可以是泵121)也与微处理器202通信。此外,双电磁阀212和214也与微处理器202通信。电磁阀212和214布置在电磁阀壳体134内,该电磁阀壳体134可以容纳这两个电磁阀。还设有显示屏216,该显示屏216是安置在壳体的顶部上面的触敏显示屏,它与微处理器202通信。此外,微处理器配置成与多个传感器通信,例如传感器209、211、213和215中的任何一个。传感器209是voc或挥发性有机化合物传感器,传感器211是微粒传感器。传感器213是湿度传感器,传感器215可以是任何其它适当类型的传感器。此外,还设有配置成转发控制器200的位置的
gps收发器219。该gps收发器允许服务器(参见图15b)定位这些控制器中的每一个,并确定这些地点的空气质量。此外,微处理器202还与警报器207通信,以在装置需要修理、需要添加生物反应性药剂或需要其它类型的维护时有选择性地发出警报。该报警器可以结合到壳体中,也可以处于远离壳体的位置,并且与包含微处理器202的控制器200进行有线或无线通信。此外,设有可选的生物反应性药剂加药装置217,该装置217配置成基于来自微处理器202的通信通过自动进料向生物反应性溶液中添加附加的生物反应性药剂。这种供料可以基于存储在存储器204中的一组预定值来触发。
84.图15b示出了多个空气净化装置的网络布局,该空气净化装置网络可以包括服务器218以及多个不同的控制器,例如控制器200、控制器220和控制器224。还可以设有与服务器218通信的计算机(例如计算机222)以及与服务器218通信的便携式电子设备(例如智能手机223)。利用该网络,计算机(例如计算机222)能够通过计算机网络通过wifi、蓝牙或蜂窝通信与任何一个空气净化装置通信来控制空气净化装置。例如,计算机222例如可以通过蓝牙通信与控制器220直接通信。或者,计算机222可以通过计算机网络(例如通过服务器218)通信,然后与控制器220通信。计算机222也可以通过经由服务器218进行通信来与位于远程地点的控制器(例如控制器200)进行通信。此外,便携式电子设备223也与控制器224通信,例如通过蓝牙直接通信或通过某种其它形式直接通信。或者,便携式电子设备223例如可以通过服务器218与位于远程地点的控制器200通信。
85.微处理器202配置成执行程序中的一系列步骤。以下程序可以安装在存储器204中,然后由微处理器202运行。
86.图15c是在图15b所示的计算机网络中使用计算机(例如计算机222)的示意性框图。例如,示出了主板222.1,该主板222.1连接至微处理器222.2、存储器222.3(可以是闪存或ram)、大容量存储器或硬盘驱动器222.4、收发器222.5(例如以太网或wifi 222.5)、电源222.6、i/o端口222.7、视频屏幕或输出装置222.8、声卡222.9。利用这种设计,存储在大容量存储装置222.4和/或存储器222.3中的程序被加载到微处理器222.2中,该微处理器222.2然后被编程以运行任何适当的软件,例如如下文所述的一组进程,以控制控制器(例如控制器200)。
87.此外,如图15d所示,示出了便携式电子设备,例如智能手机223,该便携式电子设备包括主板223.1、微处理器223.2、存储器223.3、大容量存储装置223.4或用于存储的驱动器,通过使用支持ram和rom的存储芯片,该存储驱动器还能够兼作工作存储器。还设有收发器223.5,该收发器223.5可以包括用于通信的输入和输出的sim卡、cdma卡、wi-fi、蓝牙收发器或任何其它适当的无线或有线收发器中的任何一种。还设有电源223.6(本质上是电池电源)、以及至少一个可以用于通过有线方式连接至另一台计算机或充电器的i/o端口223.7。还设有显示微处理器223.2的输出的视频屏幕223.8、以及声卡223.9,该声卡223.9包括便携式电子设备的输入(麦克风)和输出扬声器。还设有gps收发器,以使所述装置能够与gps卫星进行交互,并获得该装置的gps坐标。所有这些部件都通过主板223.1连接,并配置成与至少一个服务器(例如服务器218)和/或至少一个控制器(例如控制器200、220和/或224中的任何一个)通信。利用这种便携式电子设备,能够从存储器223.3向微处理器223.2馈送至少一组指令或程序。这组指令可以用于从便携式电子设备223控制任何一个控制器,例如控制器200、控制器220和/或控制器224。
88.图16是用于在夜间模式中运行机器的过程的流程图。利用夜间模式,机器以更安静的过程运行,以将噪音降至最低。例如,该过程开始于步骤1601,在该步骤中,启动并接通机器。该启动和接通过程可以通过用户在屏幕(例如屏幕216)上按压来实现。显示屏可以是电容式触摸屏或任何其它可用的屏幕的形式。或者,用户可以按下装置本身上的启动按钮,或者用户可以通过用户的计算机(例如计算机222)或通过便携式电子设备(例如便携式电子设备223)远程启动所述装置。接下来,用户可以输入夜间模式和关键质量控制的时间设置。用于输入该信息的装置也可以通过屏幕216或通过计算机222或通过便携式电子设备223来实现。接下来,可以将夜间模式设置存储在存储器中,例如存储器204。在步骤1604中,在预设的时间,有夜间模式激活时间。如果不是夜间模式时间,那么该过程可以继续,直到步骤1608,在该步骤中,所述系统可以激活数据驱动的空气净化机控制。或者,如果是夜间模式时间,那么系统可以进行到步骤1605,在该步骤中,所述系统可以停用数据驱动的空气净化机控制。这种数据驱动的空气净化机控制配置成对白天时间内机器周围的状况做出反应。因此,若存在更多数量的微粒或杂质,那么系统会继续运行以与周围大气中的微粒反应。但是,在夜间模式中,系统进行到步骤1606,在该步骤中,系统将机器的泵和风扇设置到低水平。接下来,在步骤1607中,系统获取空气质量数据。空气质量数据的获取可以通过所述传感器中的任何一个进行,例如voc传感器209、微粒传感器211、湿度传感器213和/或任何其它类型的适当的空气质量传感器215。
89.接下来,在步骤1609中,系统可以确定空气质量是否大于或等于微粒、voc或任何其它要监测的污染物的临界水平。若空气质量低(即,voc和/或微粒和/或天然污染物(例如花粉)的量大于临界水平),则该过程可以进行到步骤1608,在该步骤中,系统可以激活数据驱动的空气净化机控制,并继续操作该装置,直到空气质量低于临界水平。所述临界水平与普通最佳水平的区别在于:普通最佳水平是会触发所述装置向风扇发送信号以在白天模式(非夜间模式)期间更快运转的水平。
90.图17是生物药剂加药的流程图。例如,在该过程中,系统在步骤1701开始,在该步骤中,专有生物药剂被自动定量添加到储存在容器(例如容器40)中的现有体积的水或水和药剂溶液中。接下来,在步骤1702中,用户可以输入生物药剂加药的日期和时间,然后设置到下一次加药的最大时间。如上文所述,所述数据输入可以通过显示屏216进行,或者,接下来在步骤1703中系统可以将日期和到下一次加药的最大时间间隔存储在存储器中,例如存储在存储器204中。接下来,在步骤1704中,系统(例如微处理器202)可以每天获取所述日期和最大间隔数据。在步骤1705中,系统确定所述最大时间是否已经到期。若所述最大时间已经到期,则系统进行到步骤1706,其中,系统在步骤1706中激活自动生物药剂注入。接下来,在步骤1707中,系统可以将新的加药日期存储在存储器204中。
91.或者,若所述最大时间尚未到期,则在步骤1708中,系统可以收集关于生物药剂溶液的以下信息:ph值、溶解氧以及温度和atp传感器数据。接下来,在步骤1709中,系统继续分析数据,以确定生物溶液的健康性和加药要求。接下来,在步骤1710中,系统确定生物溶液是否健康。例如,若生物溶液被确定为健康的,则所述过程返回到步骤1704,以每天或更频繁地获取所述日期和最大间隔数据。或者,若系统在步骤1711中确定生物溶液不健康,则系统可以获取加药日期和历史。接下来,在步骤1712中,系统可以分析数据。接下来,在步骤1713中,系统可以确定最后两个加药周期,以确定这最后两个加药周期是否低于最大周期。
接下来,在步骤1714中,系统可以将最大加药间隔调整为最后两个加药周期的平均值。接下来,在步骤1715中,系统可以将新的最大间隔存储在存储器(例如存储器204)中。接下来,在步骤1716中,系统开始激活自动生物药剂注射机构。若最后两个加药周期大于标准最大加药周期,并且该时间周期已经超过预设的最大加药周期,则也可以自动触发步骤1716。接下来,在步骤1717中,系统可以存储新的加药日期,然后重新开始。
92.图18示出了数据驱动的空气净化机控制过程,其中该过程开始于步骤1801,在该步骤中,用户输入机器和传感器标识。若以前输入过,则也可以从数据库中获取该数据。接下来,在步骤1802中,网络分析数据并确定在某个地点是否存在多台机器,如图15b所示,该图中示出了控制器200、控制器220和控制器224。这些控制器中的每一个代表由服务器218跟踪的相关联的机器或设备。服务器218与不同的控制器持续通信,并且配置成持续更新。若在该地点没有多台机器,则在步骤1803中,系统可以将所有空气质量传感器链接至特定机器。或者,在步骤1804中,系统可以将空气质量aq传感器链接至附近的本地机器。接下来,在步骤1805中,系统配置成将机器和传感器标识传送至数据库。该机器和传感器标识信息向服务器/数据库的传送允许服务器218从位于不同地点的所有不同控制器/设备收集数据。接下来,在步骤1806中,系统可以将初始机器操作状态传送至数据库。该信息的存储可用于将来指导机器的运行。
93.图19示出了监测空气质量的过程。该过程开始于步骤1901,在该步骤中,系统收集空气质量传感器数据(aq)。接下来,在步骤1902中,系统将空气质量数据(aq)传送至存储在服务器218中的数据库。接下来,在步骤1903中,系统可以分析aq数据,然后在步骤1904中确定空气质量是否可接受。对于本文公开的所有实施例,确定环境空气质量是否可接受是通过确定空气中的挥发性有机化合物、微粒物质、花粉或其它有机物或其它杂质(例如烟雾)中的至少一种的存在量或数量是否高于预定值来进行的。这些预定值可以存储在服务器(例如服务器218)的数据库中,然后存储在存储器(例如存储器204)中(参见图15a)。
94.若空气质量是可接受的,则系统进行到步骤1905,在该步骤中,系统确定在不到30分钟内达到的空气质量是否可接受。若空气质量在大于30分钟的时间内是可接受的,则在步骤1906中,系统可以将每个机器状态降低到下一个最低级别,然后更新数据库。
95.或者,若空气质量被确定为不可接受,则系统会确定机器是否在不到30分钟内改变了其状态。若状态在不到30分钟内没有改变,则系统在步骤1908中确定机器是否处于最大值。若机器没有处于其最大状态,则在步骤1909中,机器可以提高其状态,例如增加风扇(例如风扇150)的转速(rpm),以处理更多的空气并去除更多的微粒。在步骤1909之后,所述过程可以返回到步骤1901,以收集空气质量传感器数据。
96.或者,系统可以进行到步骤1910,在该步骤中,系统确定是否存在多台机器。如果确定所有机器都存在,则在此情况下,一个区域中的所有机器都被确定为存在。若系统在步骤1912中确定所有机器都不处于最大值,则所述过程进行到步骤1914,该步骤将所有机器状态提高到下一个最高级别,然后更新系统或数据库。然后所述过程返回到步骤1901,以收集空气质量和传感器数据。若系统在步骤1912中确定所有机器都处于最大值,则所述过程进行到步骤1913,该步骤发送已经超过过滤能力的警报。
97.最后,所述系统和过程包括空气净化装置的网络,这些空气净化装置配置成收集和分析数据并记录该数据,然后基于进入系统的数据控制集成网络上的多个不同的空气净
化装置。
98.最后,微处理器202配置成控制传感器209、211、213和215,并从这些传感器读取信息。此外,微处理器202配置成控制泵210、风扇206以及阀门212和214。此外,微处理器202配置成从存储器204读取信息,并将信息发送至存储器204,并且与收发器208通信。微处理器还配置成与gps收发器219通信,然后gps收发器219传递控制器200的gps坐标。gps收发器219是可选部件。或者,控制器200可以在设置期间从便携式电子设备223接收坐标信息,或者通过指定设备的地点的手动设置来接收坐标信息。例如,由于微处理器202能够从传感器209、211、213和215中的任何一个接收信息,因此它可以基于存储在存储器204中的一组预定值有选择性地以更高的状态或较高的rpm运转风扇206,以通过系统吸入更多的空气。或者或另外,微处理器也可以更快地运转泵210,以使更多的流体以水和生物反应性溶液的形式流过系统。此外,基于预定时间或其它预定设置,微处理器可以有选择性地打开阀门212和/或214中的任何一个,以允许水从公共供水点流入容器。此外,微处理器202可以有选择性地操作生物反应性药剂加药装置217,以将更多的生物活性成分添加到生物活性成分和水的生物活性溶液中。微处理器202可以基于存储在存储器204中并随后单独地传送至微处理器202的一组预定值有选择性地操作生物反应性加药装置217,该生物反应性药剂加药装置217可以是进料器(例如螺旋进料器)或阀门的形式。这组预定值基于时间和/或使用(例如时间倍数)以及泵210的流速和/或风扇206的rpm。或者,微处理器202可以发出警报(例如警报207),该警报然后被用于指示是否需要添加更多的水,是否需要添加更多的生物反应性成分,或者是否应该对所述装置进行维修。
99.图20a、20b和21是顶部2000的侧视图,该顶部2000包括形成托盘的顶部部分2002和底部部分2004。设有在顶部部分2002与底部部分2004之间延伸的连桥2006。在顶部部分2002与底部部分2004之间还设有间隙2008。底部部分2004包括多个孔2010,这些孔配置成接收不同的散布器,例如散布器2020。多个不同的散布器耦接至底部部分2004,例如散布器2020.1、2020.2、2020.3、2020.4、2020.5、2020.6、2020.7和2020.8。
100.图22和23分别示出了分解侧视图和侧横截面图。顶部部分2002和底部部分2004中的每一个都形成为用于接收空气或水的通道。例如,顶部部分2002形成通道2012,而底部部分2014也形成通道(参见图23)。
101.图24a、24b和25示出了散布器。这些散布器2020中的每一个包括延伸到主体2021中的多个腿部2022和2023。设有多个从主体2021侧向伸出的臂2024和2025。还设有包括侧支柱2026和2027以及顶部头部2028的头部。在头部的中心设有孔2029。这些散布器位于相应的孔2010内,并且散布从这些孔流出的流体,从而确保水与容器的内壁接触,使得水不会以很响的方式滴落到腔室的底部。因此,这种流体在离开托盘的孔时被散布,从而在它落到腔室的底部时散开。这些散布器允许散布从头部流下的流体,并在适当散布流体的同时使向下流入腔室的底部的流体安静下来。因此,这些散布器有助于散布沿着腔室向下流动的流体,使得该流体在落入容器的底部时不会产生很响的滴落声。
102.因此,虽然在上文中仅说明并示出了本发明的至少一个实施例,但是应理解,能够做出各种变化和修改,而不会脱离由所附权利要求限定的本发明的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。