1.本发明涉及数控机床技术领域,特别涉及可根据加工位置防护门智能跟随的卧式数控机床。
背景技术:
2.机床的防护性能逐步成为评价机床设计水平的一项重要指标,出于对整台机床精度保持性、作业环境保护、人身安全防护以及外部感观质量等因素考虑,除了对机床运动部件和油、气、液、电线、电缆等进行单独防护外,往往需要对机床打磨抛光工作的碎屑溅射进行整体外部防护设计。
3.现有防护形式是在机床加工操作区的对应位置防护门,防护门有平移对式、平移上拉式以及内摆式结构等,无论哪种结构均对机床的占地面积或体积造成影响,且在加工后,还需要对防护门上沾染的屑料进行清理,避免遮挡视线与影响加工,费时费力。
4.为解决上述问题。为此,提出可根据加工位置防护门智能跟随的卧式数控机床。
技术实现要素:
5.本发明的目的在于提供可根据加工位置防护门智能跟随的卧式数控机床,解决了背景技术中的问题。
6.为实现上述目的,本发明提供如下技术方案:可根据加工位置防护门智能跟随的卧式数控机床,包括安装架,以及设置在安装架底板上端的工作台,工作台的上端安装有动力主体,动力主体的输出端设置有打磨主体,打磨主体的一端设置有防护组件,安装架的两侧端口均安装有电动机,电动机的输出端固定连接有螺纹杆,螺纹杆的外壁螺纹连接有横接块,横接块的一侧安装有横控架,横控架与动力主体滑动连接;
7.防护组件包括开设在工作台两侧的滑槽,两侧滑槽的一端滑动连接分别滑动连接有第一侧装板与第二侧装板,两侧的滑槽与第一侧装板和第二侧装板的连接处设置有驱动轮,第一侧装板与第二侧装板关于工作台的中心对称分布,第一侧装板与第二侧装板相靠近的一侧均通过连接轴连接玻璃防护主体;
8.打磨主体的上端安装有跟随定位终端,定位终端包括用于定位打磨主体位置的无线定位模块,无线定位模块电性连接信号发出模块,信号发出模块电性连接信号测距模块,信号测距模块电性连接信号接受模块,信号接受模块电性连接中央处理器,中央处理器电性连接驱动模块。
9.进一步地,第一侧装板与第二侧装板的外壁均设置有下拉机构,下拉机构的一端设置有压杆主体,压杆主体的一端转动连接有压块主体,压块主体下端搭接有擦料组件。
10.进一步地,下拉机构包括中心处与连接轴固定连接有第一锥形齿轮,第一锥形齿轮的一侧啮合连接有第二锥形齿轮,第二锥形齿轮的中心处固定连接有中接杆,中接杆远离第二锥形齿轮的一端固定连接有主动齿轮。
11.进一步地,主动齿轮偏于圆心处的外壁安装有绕杆,绕杆的外壁轴连接有往复弯
杆,往复弯杆远离绕杆的一端轴连接有往复拉杆。
12.进一步地,往复拉杆远离往复弯杆的一端与压杆主体固定连接。
13.进一步地,擦料组件包括转动连接在第一侧装板与第二侧装板上板内腔的收卷辊,收卷辊和第一侧装板与第二侧装板的连接处安装有复位扭簧,收卷辊的外壁环绕设置有拉带,拉带的一端固定连接有擦板主体。
14.进一步地,擦板主体的一侧开设有活动腔,活动腔内底板固定连接有复位扭簧,复位扭簧的一端固定连接有活动块,活动块与活动腔滑动连接。
15.进一步地,活动块远离复位扭簧的一端固定连接有贴板。
16.进一步地,第一侧装板与第二侧装板的下板均开设有收集槽,收集槽的内腔安装有导料斜板,导料斜板的最低处设置有下料槽,下料槽开设在收集槽的底板,下料槽的下端滑动连接有拉板。
17.本发明提出的另一种技术方案:提供可根据加工位置防护门智能跟随的卧式数控机床的实施方法,包括以下步骤:
18.s1:在打磨主体进行纵向移动时,通过无线定位模块点位打磨主体的位置,通过信号发出模块发出定位信号,然后通过信号测距模块对信号距离进行计算,接着由信号接受模块接受信号,通过中央处理器处理信息,触发驱动模块启动驱动轮带动第一侧装板、第二侧装板与玻璃防护主体跟随移动;
19.s2:在工作结束打开玻璃防护主体时,玻璃防护主体会通过转动连接轴来实现转动打开的目的,在连接轴转动时,第一锥形齿轮会在带动下转动,第一锥形齿轮带动第二锥形齿轮转动,通过第二锥形齿轮带动中接杆与主动齿轮转动,故而带动绕杆围绕主动齿轮的中心转动,通过绕杆带动往复弯杆与往复拉杆的配合,向下拉动压杆主体,通过压杆主体与压块主体的配合,下拉擦料组件,利用擦料组件对沾染在玻璃防护主体上的屑料进行清理,开启的同时同步清理;
20.s3:在沾染在玻璃防护主体的外壁的屑料被清理后,屑料会下落至收集槽进行收集,工作人员通过向外拉动拉板,屑料会通过导料斜板向下料槽滑落,从下料槽中落下。
21.与现有技术相比,本发明的有益效果是:
22.1.可根据加工位置防护门智能跟随的卧式数控机床,在打磨主体进行纵向移动时,通过无线定位模块点位打磨主体的位置,通过信号发出模块发出定位信号,然后通过信号测距模块对信号距离进行计算,接着由信号接受模块接受信号,通过中央处理器处理信息,触发驱动模块启动驱动轮带动第一侧装板、第二侧装板与玻璃防护主体跟随移动,实现根据加工位置进行智能跟随,结构节约空间且防护全面。
23.2.可根据加工位置防护门智能跟随的卧式数控机床,在工作结束打开玻璃防护主体带动连接轴转动时,第一锥形齿轮会在带动下转动,第一锥形齿轮带动第二锥形齿轮转动,通过第二锥形齿轮带动中接杆与主动齿轮转动,故而带动绕杆围绕主动齿轮的中心转动,通过绕杆带动往复弯杆与往复拉杆的配合,向下拉动压杆主体,通过压杆主体与压块主体的配合,下拉擦料组件,利用擦料组件对沾染在玻璃防护主体上的屑料进行清理,开启的同时同步清理,节约时间,提高了工作效率。
24.3.可根据加工位置防护门智能跟随的卧式数控机床,下拉擦料组件时,擦板主体会在拉动下贴合玻璃防护主体的外壁进行清理,此时拉带带动收卷辊将复位扭簧转动至紧
绷状态,在玻璃防护主体通过转动连接轴关闭时,压杆主体与压块主体会在下拉机构带动下恢复原位,通过复位扭簧的复位能力,带动拉带回收擦板主体,将擦板主体恢复原位,方便操作。
附图说明
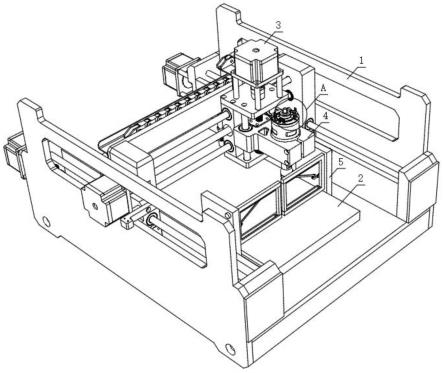
25.图1为本发明可根据加工位置防护门智能跟随的卧式数控机床的整体立体结构示意图;
26.图2为本发明可根据加工位置防护门智能跟随的卧式数控机床的整体平面结构示意图;
27.图3为本发明可根据加工位置防护门智能跟随的卧式数控机床的整体俯视结构示意图;
28.图4为本发明可根据加工位置防护门智能跟随的卧式数控机床的防护组件结构示意图;
29.图5为本发明可根据加工位置防护门智能跟随的卧式数控机床的图1的a处放大结构示意图;
30.图6为本发明可根据加工位置防护门智能跟随的卧式数控机床的定位终端内部架构结构示意图;
31.图7为本发明可根据加工位置防护门智能跟随的卧式数控机床的下拉机构、压杆主体与压块主体结构示意图;
32.图8为本发明可根据加工位置防护门智能跟随的卧式数控机床的下拉机构立体结构示意图;
33.图9为本发明可根据加工位置防护门智能跟随的卧式数控机床的擦料组件结构示意图;
34.图10为本发明可根据加工位置防护门智能跟随的卧式数控机床的图9的b处放大结构示意图;
35.图11为本发明可根据加工位置防护门智能跟随的卧式数控机床的收集槽与导料斜板结构示意图;
36.图12为本发明可根据加工位置防护门智能跟随的卧式数控机床的下料槽与拉板结构示意图。
37.图中:1、安装架;2、工作台;3、动力主体;4、打磨主体;5、防护组件;51、滑槽;52、第一侧装板;53、第二侧装板;54、玻璃防护主体;55、下拉机构;551、第一锥形齿轮;552、第二锥形齿轮;553、中接杆;554、主动齿轮;555、绕杆;556、往复弯杆;557、往复拉杆;56、压杆主体;57、压块主体;58、擦料组件;581、收卷辊;582、复位扭簧;583、拉带;584、擦板主体;585、活动腔;586、复位扭簧;587、活动块;588、贴板;59、收集槽;510、导料斜板;511、下料槽;512、拉板;6、电动机;7、螺纹杆;8、横接块;9、横控架;10、定位终端;101、无线定位模块;102、信号发出模块;103、信号测距模块;104、信号接受模块;105、中央处理器;106、驱动模块。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.请参阅图1-图12,为解决现有防护形式是在机床加工操作区的对应位置防护门,防护门有平移对式、平移上拉式以及内摆式结构等,无论哪种结构均对机床的占地面积或体积造成影响的问题,提供以下优选的技术方案:
40.可根据加工位置防护门智能跟随的卧式数控机床,包括安装架1,以及设置在安装架底板上端的工作台2,工作台2的上端安装有动力主体3,动力主体3的输出端设置有打磨主体4,打磨主体4的一端设置有防护组件5,安装架1的两侧端口均安装有电动机6,电动机6的输出端固定连接有螺纹杆7,螺纹杆7的外壁螺纹连接有横接块8,横接块8的一侧安装有横控架9,横控架9与动力主体3滑动连接;
41.防护组件5包括开设在工作台2两侧的滑槽51,两侧滑槽51的一端滑动连接分别滑动连接有第一侧装板52与第二侧装板53,两侧的滑槽51与第一侧装板52和第二侧装板53的连接处设置有驱动轮,第一侧装板52与第二侧装板53关于工作台2的中心对称分布,第一侧装板52与第二侧装板53相靠近的一侧均通过连接轴连接玻璃防护主体54;
42.打磨主体4的上端安装有跟随定位终端10,定位终端10包括用于定位打磨主体4位置的无线定位模块101,无线定位模块101电性连接信号发出模块102,信号发出模块102电性连接信号测距模块103,信号测距模块103电性连接信号接受模块104,信号接受模块104电性连接中央处理器105,中央处理器105电性连接驱动模块106。
43.具体的,在打磨主体4对工作台2上的代加工产品进行打磨时,其打磨所溅射的屑料会被玻璃防护主体54所遮挡,避免向外溅射,提高安全性,通过电动机6、螺纹杆7、横接块8和横控架9的有机协作,可使打磨主体4进行横向纵向移动,配合产品位置进行加工;
44.在打磨主体4进行纵向移动时,通过无线定位模块101点位打磨主体4的位置,通过信号发出模块102发出定位信号,然后通过信号测距模块103对信号距离进行计算,接着由信号接受模块104接受信号,通过中央处理器105处理信息,触发驱动模块106启动驱动轮带动第一侧装板52、第二侧装板53与玻璃防护主体54跟随移动,实现根据加工位置进行智能跟随,结构节约空间且防护全面。
45.为了解决在加工后,还需要对防护门上沾染的屑料进行清理,避免遮挡视线与影响加工,费时费力的问题,提供以下优选的技术方案:
46.第一侧装板52与第二侧装板53的外壁均设置有下拉机构55,下拉机构55的一端设置有压杆主体56,压杆主体56的一端转动连接有压块主体57,压块主体57下端搭接有擦料组件58。
47.下拉机构55包括中心处与连接轴固定连接有第一锥形齿轮551,第一锥形齿轮551的一侧啮合连接有第二锥形齿轮552,第二锥形齿轮552的中心处固定连接有中接杆553,中接杆553远离第二锥形齿轮552的一端固定连接有主动齿轮554。
48.主动齿轮554偏于圆心处的外壁安装有绕杆555,绕杆555的外壁轴连接有往复弯杆556,往复弯杆556远离绕杆555的一端轴连接有往复拉杆557。
49.往复拉杆557远离往复弯杆556的一端与压杆主体56固定连接。
50.具体的,在工作结束打开玻璃防护主体54时,玻璃防护主体54会通过转动连接轴来实现转动打开的目的,在连接轴转动时,第一锥形齿轮551会在带动下转动,第一锥形齿轮551带动第二锥形齿轮552转动,通过第二锥形齿轮552带动中接杆553与主动齿轮554转动,故而带动绕杆555围绕主动齿轮554的中心转动,通过绕杆555带动往复弯杆556与往复拉杆557的配合,向下拉动压杆主体56,通过压杆主体56与压块主体57的配合,下拉擦料组件58,利用擦料组件58对沾染在玻璃防护主体54上的屑料进行清理,开启的同时同步清理,节约时间,提高了工作效率。
51.为了方便操作,提供以下优选的技术方案:
52.擦料组件58包括转动连接在第一侧装板52与第二侧装板53上板内腔的收卷辊581,收卷辊581和第一侧装板52与第二侧装板53的连接处安装有复位扭簧582,收卷辊581的外壁环绕设置有拉带583,拉带583的一端固定连接有擦板主体584。
53.具体的,下拉擦料组件58时,擦板主体584会在拉动下贴合玻璃防护主体54的外壁进行清理,此时拉带583带动收卷辊581将复位扭簧582转动至紧绷状态,在玻璃防护主体54通过转动连接轴关闭时,压杆主体56与压块主体57会在下拉机构55带动下恢复原位,通过复位扭簧582的复位能力,带动拉带583回收擦板主体584,将擦板主体584恢复原位,方便操作。
54.为了进一步提高清理效率,提供以下优选的技术方案:
55.擦板主体584的一侧开设有活动腔585,活动腔585内底板固定连接有复位扭簧586,复位扭簧586的一端固定连接有活动块587,活动块587与活动腔585滑动连接。
56.活动块587远离复位扭簧586的一端固定连接有贴板588。
57.具体的,受压块主体57的影响,擦板主体584贴进玻璃防护主体54的外壁,从而活动块587回收在活动腔585内,复位扭簧586在挤压下呈紧绷状态,故而通过复位扭簧586的反作用力,会带动贴板588紧紧贴合玻璃防护主体54的外壁,利用贴板588进行清理,清理效率高。
58.为了方便收集屑料,提供以下优选的技术方案:
59.第一侧装板52与第二侧装板53的下板均开设有收集槽59,收集槽59的内腔安装有导料斜板510,导料斜板510的最低处设置有下料槽511,下料槽511开设在收集槽59的底板,下料槽511的下端滑动连接有拉板512。
60.具体的,在沾染在玻璃防护主体54的外壁的屑料被清理后,屑料会下落至收集槽59进行收集,工作人员通过向外拉动拉板512,屑料会通过导料斜板510向下料槽511滑落,从下料槽511中落下,方便处理。
61.为了进一步更好的解释说明上述实施例,本发明还提供了一种实施方案,可根据加工位置防护门智能跟随的卧式数控机床的实施方法,包括以下步骤:
62.步骤一:在打磨主体4进行纵向移动时,通过无线定位模块101点位打磨主体4的位置,通过信号发出模块102发出定位信号,然后通过信号测距模块103对信号距离进行计算,接着由信号接受模块104接受信号,通过中央处理器105处理信息,触发驱动模块106启动驱动轮带动第一侧装板52、第二侧装板53与玻璃防护主体54跟随移动;
63.步骤二:在工作结束打开玻璃防护主体54时,玻璃防护主体54会通过转动连接轴
来实现转动打开的目的,在连接轴转动时,第一锥形齿轮551会在带动下转动,第一锥形齿轮551带动第二锥形齿轮552转动,通过第二锥形齿轮552带动中接杆553与主动齿轮554转动,故而带动绕杆555围绕主动齿轮554的中心转动,通过绕杆555带动往复弯杆556与往复拉杆557的配合,向下拉动压杆主体56,通过压杆主体56与压块主体57的配合,下拉擦料组件58,利用擦料组件58对沾染在玻璃防护主体54上的屑料进行清理,开启的同时同步清理;
64.步骤三:在沾染在玻璃防护主体54的外壁的屑料被清理后,屑料会下落至收集槽59进行收集,工作人员通过向外拉动拉板512,屑料会通过导料斜板510向下料槽511滑落,从下料槽511中落下。
65.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
66.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。