技术特征:
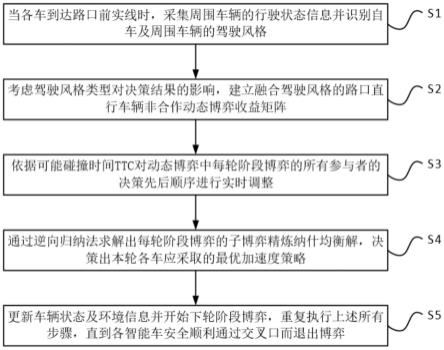
1.一种融合驾驶风格博弈的智能车交叉口直行速度决策方法,其特征在于,所述融合驾驶风格博弈的智能车交叉口直行速度决策方法包括如下步骤:s1、当各车到达路口前实线时,采集周围车辆的行驶状态信息并识别车辆自身及周围车辆的驾驶风格;s2、对车辆驾驶风格类型进行分析记录,建立融合驾驶风格的路口直行车辆非合作动态博弈收益矩阵;s3、依据可能碰撞时间ttc对动态博弈中每轮阶段博弈的所有参与者的决策先后顺序进行实时调整;s4、通过逆向归纳法求解出每轮阶段博弈的子博弈精炼纳什均衡解,决策出本轮各车应采取的最优加速度策略;s5、更新车辆状态及环境信息并开始下轮阶段博弈,重复执行上述所有步骤,直到各智能车安全通过交叉口而退出博弈。2.根据权利要求1所述的融合驾驶风格博弈的智能车交叉口直行速度决策方法,其特征在于,所述步骤s1中,通过加速度的变化率识别驾驶风格并将驾驶风格划分为激进型、正常型及保守型;提出驾驶风格识别系数s
vehicle
定义为:定义为:其中,j(t)为智能车单位时间内加速度的变化率,s
j
为驾驶风格识别周期内加速度变化率的标准差,为识别周期内加速度变化率的平均值,v(t)为智能车辆行驶速度;s
vehicle
≥1时该车辆驾驶风格为激进型,0.5<s
vehicle
<1时该车辆驾驶风格为正常型,s
vehicle
≤0.5时该车辆驾驶风格为保守型。3.根据权利要求1所述的融合驾驶风格博弈的智能车交叉口直行速度决策方法,其特征在于,所述步骤s2中建立的车辆非合作动态博弈收益矩阵,包括:考虑驾驶风格的安全性收益p
safe
、考虑驾驶风格的行车效率收益p
eff
、考虑乘客体验的舒适度收益p
com
和考虑燃油消耗的经济性收益p
eco
;车辆i头部到达冲突区域时间为:其中,为上一阶段博弈结束时车辆i的速度或当前阶段博弈开始时车辆i的速度,为当前阶段博弈车辆i可能从加速度候选集中采取的加速度策略,d
i
为当前车辆i头部到冲突区域近端边缘的距离;车辆i尾部刚驶离冲突区域时间为:
其中,l
i
为车辆i的长度,w为车道宽度;车辆i与j的绝对安全时间差为:δt
ij
=t
i-τ
j
或δt
ij
=t
j-τ
i
;总收益矩阵由四个收益指标及其相应权重系数构建而成:p
in
=σ1p
safe
σ2p
eff
σ3p
com
σ4p
eco
σ1 σ2 σ3 σ4=1=1其中,σ1、σ2、σ3、σ4分别表示车辆对安全性需求、效率性需求、舒适性需求和经济性需求的权重系数,四项权重总和等于1,同时,设定路口通行时车辆最大加减速度以及最大速度等约束,a
max
和a
min
分别表示车辆的最大加速度和最大减速度,车辆最小速度为0,v
max
表示道路限速条件。4.根据权利要求3所述的融合驾驶风格博弈的智能车交叉口直行速度决策方法,其特征在于,所述δt
ij
大于0,用于根据安全性门槛将加速度候选集中,使绝对安全时间差为负的加速度策略对排除。5.根据权利要求3所述的融合驾驶风格博弈的智能车交叉口直行速度决策方法,其特征在于,所述考虑驾驶风格的安全性收益定义为:车辆i为激进型时:车辆i为正常型时:车辆i为保守型时:其中,δt
max
为绝对安全时间差的上限值。6.根据权利要求3所述的融合驾驶风格博弈的智能车交叉口直行速度决策方法,其特征在于,所述考虑驾驶风格的行车效率收益定义为:其中,0<θ<1,v
max
为路口限制的最大速度,为当前阶段博弈车辆i可能采取的加速度策略所对应的速度,v
ibest
为车辆i的驾驶风格下所对应的最优速度。
7.根据权利要求6所述的融合驾驶风格博弈的智能车交叉口直行速度决策方法,其特征在于,所述考虑乘客体验的舒适度收益定义为:其中,为当前阶段博弈中可能采取的加速度,为上一阶段博弈决策出的最优加速度,a
max
、a
min
为限定的最大加速度和最大减速度。8.根据权利要求6所述的融合驾驶风格博弈的智能车交叉口直行速度决策方法,其特征在于,燃油消耗率由速度函数表出:征在于,燃油消耗率由速度函数表出:其中,为当前阶段博弈车辆的平均速度,为当前阶段博弈开始时车辆i的速度,t为阶段博弈周期,a、e、f、g为常量系数;所述考虑燃油消耗的经济性收益定义为:其中,e
min
、e
max
分别代表经济性指标的参考下界和上界。9.根据权利要求3所述的融合驾驶风格博弈的智能车交叉口直行速度决策方法,其特征在于,所述步骤s3中本发明依据可能碰撞时间ttc对动态博弈中每轮阶段博弈的所有参与者的决策先后顺序进行实时调整;具有冲突的两车的可能碰撞时间表示为:两车都以当前时刻的速度和加速度行驶以到达路口冲突区域的时间差,具体公式定义如下:达路口冲突区域的时间差,具体公式定义如下:分别为车辆i、j以上一阶段博弈结束时的速度和上一阶段博弈决策出的最优加速度行驶,路口四车可能碰撞时间依次为t
ab
,t
bc
,t
cd
,t
da
。
技术总结
本发明适用于智能汽车驾驶行为决策技术领域,提供了一种融合驾驶风格博弈的智能车交叉口直行速度决策方法,采集周围车辆的行驶状态信息并识别车辆自身及周围车辆的驾驶风格;建立融合驾驶风格的路口直行车辆非合作动态博弈收益矩阵;对动态博弈中每轮阶段博弈的参与者的决策先后顺序进行调整;通过逆向归纳法决策出本轮各车应采取的最优加速度策略;更新车辆状态及环境信息并开始下轮阶段博弈,重复执行上述所有步骤,直到各智能车安全通过交叉口而退出博弈。该方法在保证驾驶安全性的前提下有效地消除了交叉口通行冲突并明确路权,使智能车既安全高效地通过路口,也提高了智能车在路口决策的流畅度和拟人程度,更加符合人类驾驶员的操作习惯。驾驶员的操作习惯。驾驶员的操作习惯。
技术研发人员:赵海艳 李成 卢星昊 徐成成 李光旭
受保护的技术使用者:吉林大学
技术研发日:2022.08.12
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。