1.本发明涉及无线电能传输技术领域,是一种自主式无人潜航器无线电能传输的钟摆型抗偏移磁耦合系统。
背景技术:
2.随着科学技术的进步与发展,各国纷纷开始对海洋资源进行开发和探索,而自主式无人潜航器作为水下资源勘探和军事巡逻的重要设备,成为了目前海洋工程领域的研究热点,具有广泛的经济、科学和军事价值。自主式无人潜航器可以实现灵活的水下无人作业或无人作战,对于近海防御、反侦察巡逻等国防能力具有极大的提升作用。
3.目前,对自主式无人潜航器的充电方式主要为打捞回收直接更换电池或直接采用湿拔插接头进行充电。打捞方式需要人工操作,自动化程度低且容易造成军事目标的暴露,隐蔽性较差,此外频繁的电池更换还会影响电池舱的密封程度;湿拔插充电设备造价昂贵,且存在接头老化等问题易带来漏电等安全隐患,可靠性较差。采用无线电能传输技术对自主式无人潜航器进行充电的方法不会产生电火花、不会受海水的腐蚀、不需要人为干预,是突破自主式无人潜航器续航里程瓶颈、实现全自动化无人值守作业的最优解决方法。
4.洋流引起的无人潜航器横滚会导致磁耦合机构原、副边产生偏移,影响电能传输的功率、效率,而解决这一问题最直接且有效的办法即需要优先解决磁耦合器因无人潜航器横滚导致的性能下降问题。现有技术方案中,有研究机构在科研文献中提出了半嵌入式的磁耦合器来提升耦合器的对准性能,但这无疑会改变无人潜航器的流体力学特征,影响其移动特征和机动性;有些研究机构设计了360
°
环绕的全嵌入式螺线管线圈磁耦合器,以实现在360
°
偏移下的旋转对称性,但是这种磁耦合器包裹在无人潜航器的外侧一周,其体积重量都非常大,不利于无人潜航器的轻量化设计。
技术实现要素:
5.针对现有技术的以上缺陷或改进需求,本发明的钟摆型抗偏移磁耦合器结构,解决了自主式无人潜航器续航能力差、充电困难的问题。所设计磁耦合器结构的接收端体积小,占有自主式无人潜航器内部空间极小,有利于轻量化设计和空间布局优化,且不改变自主式水下航行器外形,钟摆型结构有利于保持自主式无人潜航器的浮力稳定性,降低洋流的横滚偏移冲击影响,且所设计系统具备较高的偏移容限,能够应对20%磁耦合器外尺寸的失准偏移。
6.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备
所固有的要素。
7.本发明提供了一种自主式无人潜航器无线电能传输的钟摆型抗偏移磁耦合系统,本发明提供了以下技术方案:
8.一种自主式无人潜航器无线电能传输的钟摆型抗偏移磁耦合系统,所述系统包括:自主式无人潜航器、磁耦合器发射端、磁耦合器接收端、接收端电气总成、发射端电气总成、潜航器接驳机构和屏蔽层;
9.磁耦合器发射端安装于潜航器接驳机构中内侧表面,磁耦合器接收端安装于自主式无人潜航器的腹部位置,发射端电气总成安装于潜航器接驳机构内部进行集成安装,屏蔽层位于磁耦合器接收端和接收端电气总成之间;自主式无人潜航器在完成任务后返回潜航器接驳机构实现自主式无线充电。
10.优选地,发射端电气总成包括功率因数矫正模块、逆变器模块和发射端补偿模块,其中功率因数矫正模块与岸基侧电网通过海底电缆连接,将电网侧电流调节成可供无线电能传输系统用的稳压直流电流,通过逆变器模块进行直流/交流变换,经过发射端补偿模块进行谐振变换从而供给磁耦合器发射端进行无线电能传输。
11.优选地,磁耦合器发射端包括发射端线圈和发射端磁芯,发射端线圈和发射端磁芯与潜航器接驳机构内侧表面呈相同的表面曲率以实现接驳性能和无线电能均一化传输距离,确保系统电能传输性能的稳定。
12.优选地,发射端磁芯在轴向方向和旋转径向方向均略大于发射端线圈,发射端线圈和发射端磁芯间需设置有0.5mm间隙并由高耐压聚酰亚胺材料进行填充,发射端线圈和发射端磁芯外侧包覆有防水耐压的非金属有机复合材料外壳,外壳与潜航器接驳机构的外壳直接嵌入连接固定。
13.优选地,磁耦合器接收端包括接收端线圈和接收端磁芯,接收端磁芯包括顶部磁芯中段磁芯和底部磁芯,底部磁芯呈弧形平面结构,曲率同自主式无人潜航器的口径曲率相同,贴附于自主式无人潜航器舱段的底部,中段磁芯为磁耦合器接收端的支撑部件,中段磁芯通过粘合剂与顶部磁芯和底部磁芯连接。
14.优选地,接收端电气总成包括接收端补偿模块、整流器模块、直流变换模块和自主式无人潜航器的锂离子电池,接收端补偿模块与磁耦合器接收端连接,将拾取到的磁场转换为电能后传递给整流器模块进行交直流变换,通过直流变换模块进行参数调整,为自主式无人潜航器的锂离子电池负载实现供电。
15.优选地,屏蔽层采用铝基金属材料制作而成,安装位置在高于磁耦合器40mm,屏蔽层两侧与自主式无人潜航器外壳进行机械锁紧连接,确保二者不会产生位移。
16.优选地,发射端补偿模块和接收端补偿模块采用对称式补偿结构,原副边采用相同的谐振补偿网络,补偿结构包括但不限于串联-串联补偿、并联-并联补偿、lcl-lcl补偿、lcc-lcc补偿、lclc-lclc补偿。
17.优选地,逆变器模块和整流器模块采用双向可控全桥式mosfet型。
18.优选地,自主式无人潜航器在装配有无线电能传输功能的舱段处采用防水耐压的非金属有机复合材料外壳。
19.本发明具有以下有益效果:
20.本发明公开了一种自主式无人潜航器无线电能传输的钟摆型抗偏移磁耦合器及
系统,所述磁耦合器包括设置在接驳坞站上的发射端和设置在自主式无人潜航器上的接收端,所述发射端包括发射磁芯和绕设在所述发射磁芯上的发射线圈,所述接收端磁芯包括长方体形的主体和位于所述主体上下两侧的弧形延长扩展磁芯区域。本发明提出的钟摆型抗偏移磁耦合器结构,解决了自主式无人潜航器续航能力差、充电困难的问题。所设计磁耦合器结构的接收端体积小,占有自主式无人潜航器内部空间极小,有利于轻量化设计和空间布局优化,且不改变自主式水下航行器外形,钟摆型结构有利于保持自主式无人潜航器的浮力稳定性,降低洋流的横滚偏移冲击影响,且所设计系统具备较高的偏移容限,能够应对20%磁耦合器外尺寸的失准偏移。
21.本发明提出了一种自主式无人潜航器无线电能传输的钟摆型抗偏移磁耦系统,其优势在于磁耦合器i型接收端可以在较大的偏移幅度范围内捕获发射端所产生的交变磁场,从而在旋转方向和轴向行进方向均具备良好的抗偏移能力。
22.本发明提出的磁耦合器接收端纵向高度较小且重心低,在自主式无人潜航器舱段内占用体积较小,且所设计磁耦合器具备良好的电磁兼容条件,不会对舱段内其他电力电子设备产生电磁干扰。
23.本发明提出的磁耦合器具备较强的通用性设计能力和可拓展性,通过对磁耦合器参数尺寸的合理设计,可适配180、324、553等多种型号的自主式无人潜航器,并在不改变自主式无人潜航器壳体形态的前提下实现高无线电能传输功率效率、抗偏移能力及抗衡滚稳定性的自主式无人潜航器无线电能传输的磁耦合器及系统设计。
附图说明
24.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
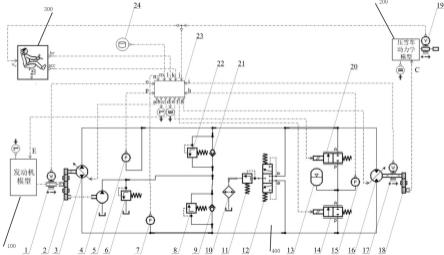
25.图1为一种自主式无人潜航器无线电能传输的钟摆型抗偏移磁耦合系统整体结构图;
26.图2为发射端侧各部件连接示意图;
27.图3为接收端侧各部件连接示意图;
28.图4为系统磁耦合器示意图;
29.图5为系统磁耦合器正视图;
30.图6为接收端线圈结构图;
31.图7为接收端磁芯结构图;
32.图8为发射端线圈结构图;
33.图9为发射端磁芯结构图;
34.图10为本发明实施例具体结构示意图;
35.图11为旋转偏移条件下系统耦合系数及传输效率波动;
36.图12为前后偏移条件下系统耦合系数及传输效率波动;
37.图13为对齐状态稳定工作条件下的系统磁通密度分布示意图。
具体实施方式
38.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
40.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
41.此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
42.以下结合具体实施例,对本发明进行了详细说明。
43.具体实施例一:
44.根据图1至图13所示,本发明为解决上述技术问题采取的具体优化技术方案是:本发明涉及一种自主式无人潜航器无线电能传输的钟摆型抗偏移磁耦合系统。
45.本发明旨在于提供一种高无线电能传输功率效率、不改变自主式无人潜航器壳体形态、具有抗偏移能力及抗衡滚稳定性的自主式无人潜航器无线电能传输的磁耦合器及系统。
46.为达到上述目的,本发明采用如下技术方案:
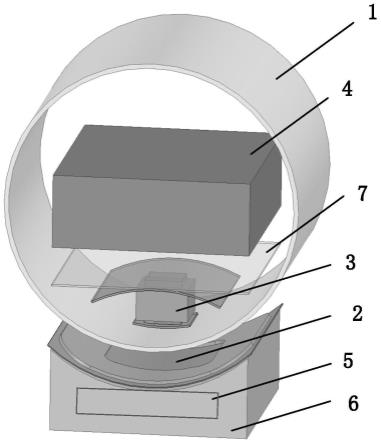
47.图1为本发明提出的一种自主式无人潜航器无线电能传输的钟摆型抗偏移磁耦合器及其系统整体结构图。系统部件主要包括有:自主式无人潜航器1,磁耦合器发射端2,磁耦合器接收端3,接收端电气总成4,发射端电气总成5,潜航器接驳机构6,屏蔽层7。如图所示,所提出的自主式无人潜航器无线电能传输系统的磁耦合器发射端2安装于潜航器接驳机构6中,磁耦合器接收端3安装于自主式无人潜航器的腹部位置。其中潜航器接驳机构6包括但不局限于笼式、底座式和锁紧式等,图1中以底座式进行展示。自主式无人潜航器在完成任务后返回潜航器接驳机构6实现自主式无线充电。然而,现有接驳技术和定位技术的不成熟,无人潜航器在进入潜航器接驳机构6后,通过机械引导和对位手段仍可能存在无线电能传输系统磁耦合器外尺寸20%的横向或旋转偏移。
48.磁耦合器发射端安装于潜航器接驳机构内侧表面,发射端电气总成安装于潜航器接驳机构内部进行集成安装。
49.发射端电气总成主要包括功率因数矫正模块5-1、逆变器模块5-2和发射端补偿模块5-3。其中功率因数矫正与岸基侧电网通过海底电缆连接,将电网侧电流调节成可供无线电能传输系统用的稳压直流电流,通过逆变器模块进行直流/交流变换,经过发射端补偿模块进行谐振变换从而供给磁耦合器发射端2进行无线电能传输。
50.磁耦合器发射端包括发射端线圈2-1和发射端磁芯2-2,发射端线圈和发射端磁芯与潜航器接驳机构内侧表面呈相同的表面曲率以实现更好的接驳性能和无线电能均一化传输距离,确保系统电能传输性能的稳定。发射端线圈采用单极性的基础线圈结构,线圈形态包括但不限于正方形、矩形、圆形、三角形、六边形。发射端磁芯位于发射端线圈和潜航器接驳机构之间,由软磁磁性材料构成,磁芯材料包括但不限于锰锌铁氧体、镍锌铁氧体、铁基纳米晶、钴基纳米晶、铁基非晶、钴基非晶。特别地,为确保磁芯结构适配于潜航器接驳机构的弧形壳体,需要对其采用柔性加工处理,使材料具备一定的形变能力和柔韧性,以确保发射端整体结构在安装过程中由海面沉入海底时因外部压力变化而产生的形态变动,避免产生线圈和磁芯以及潜航器接驳机构间的位移。发射端磁芯在轴向方向和旋转径向方向均略大于发射端线圈。发射端线圈和发射端磁芯间需设置有0.5mm间隙并由高耐压聚酰亚胺材料进行填充。发射端线圈和发射端磁芯外侧包覆有防水耐压的非金属有机复合材料外壳。上述外壳与潜航器接驳机构的外壳直接嵌入连接固定。
51.磁耦合器接收端包括接收端线圈3-1和接收端磁芯3-2。接收端磁芯由三部分组成,包括顶部磁芯3-2-1,中段磁芯3-2-2,底部磁芯3-2-3。接收端磁芯材料包括但不限于锰锌铁氧体、镍锌铁氧体、铁基纳米晶、钴基纳米晶、铁基非晶、钴基非晶。特别地,接收端磁芯的顶部磁芯和底部磁芯的磁性材料采用柔性加工处理,使材料具备一定的形变能力和柔韧性。底部磁芯呈弧形平面结构,曲率同自主式无人潜航器的口径曲率相同,使其可以贴附于自主式无人潜航器舱段的底部。中段磁芯为磁耦合器接收端的支撑部件,除了起到约束磁路的作用外还对磁耦合器接收端的形态起到机械支撑作用,中段磁芯通过粘合剂与顶部磁芯和底部磁芯连接。顶部磁芯与底部磁芯曲率相同但弯曲方向相反,其覆盖面积略大于底部磁芯,以起到改善磁耦合器磁力线路径的作用,对空间磁场进行约束和塑形,以提高系统的无线电能传输效率。磁耦合器接收端磁芯的顶部磁芯、中段磁芯及底部磁芯的xoy平面的覆盖面积应根据磁耦合器发射端线圈结构进行对应的多目标寻优设计,以实现最优参数匹配,达到最佳的无线电能传输效果。接收端线圈绕制在接收端磁芯的中段磁芯处,根据不同的设计需求可以采取单层绕制、多层绕制、密绕、分段绕制等,以适应自主式无人潜航器的舱段空间布局。接收端磁芯的顶部磁芯和底部磁芯宽度需略宽于接收端线圈的绕线区域。接收端线圈和接收端磁芯间需设置有0.5mm间隙并由高耐压聚酰亚胺材料进行填充。磁耦合器接收端应与自主式无人潜航器外壳进行连接和固定,并在二者之间安装硅制导热垫片。
52.自主式无人潜航器1在装配有无线电能传输功能的舱段处应采用防水耐压的非金属有机复合材料外壳。
53.屏蔽层7由铝基金属材料制作而成,位于磁耦合器接收端和接收端电气总成之间,其安装位置在高于磁耦合器40mm为宜,屏蔽层两侧与自主式无人潜航器外壳进行机械锁紧连接,确保二者不会产生位移。屏蔽层的作用是进一步的屏蔽和吸收磁耦合器在自主式无人潜航器内部所产生的漏磁通,确保接收端电气总成的电磁兼容性良好。
54.接收端电气总成4由接收端补偿模块4-1、整流器模块4-2、直流变换模块4-3和锂离子电池4-4组成。如图3所示。其中接收端补偿模块与磁耦合器接收端连接,将拾取到的磁场转换为电能后传递给整流器模块进行交直流变换,之后通过直流变换模块进行参数调整,为自主式无人潜航器的锂离子电池负载实现供电。
55.在本发明中,磁耦合器接收端线圈的绕线匝数应略大于磁耦合器发射端线圈,以实现二者的自感相对平衡。逆变器模块和整流器模块采用双向可控全桥式mosfet型,可实现无线电能的能量双向路由。即:通过控制发射端和接收端的电气回路方向,可以实现双向无线电能传输。特别说明,反向无线电能传输状态指的是,无人潜航器的锂离子电池作为供电源,为潜航器接驳机构实现电能传输,此时的磁耦合器发射端和接收端的关系会对调。即原本的发射端变为反向无线电能传输状态的接收端,原本的接收端变为反向无线电能传输状态的发射端。
56.发射端补偿模块和接收端补偿模块需采用对称式补偿结构,即原副边采用相同的谐振补偿网络,补偿结构包括但不限于串联-串联补偿、并联-并联补偿、lcl-lcl补偿、lcc-lcc补偿、lclc-lclc补偿。
57.本发明提出了一种自主式无人潜航器无线电能传输的钟摆型抗偏移磁耦合器及系统,其优势在于磁耦合器i型接收端可以在较大的偏移幅度范围内捕获发射端所产生的交变磁场,从而在旋转方向和轴向行进方向均具备良好的抗偏移能力。
58.本发明提出的磁耦合器接收端纵向高度较小且重心低,在自主式无人潜航器舱段内占用体积较小,且所设计磁耦合器具备良好的电磁兼容条件,不会对舱段内其他电力电子设备产生电磁干扰。
59.本发明提出的磁耦合器具备较强的通用性设计能力和可拓展性,通过对磁耦合器参数尺寸的合理设计,可适配180、324、553等多种型号的自主式无人潜航器,并在不改变自主式无人潜航器壳体形态的前提下实现高无线电能传输功率效率、抗偏移能力及抗衡滚稳定性的自主式无人潜航器无线电能传输的磁耦合器及系统设计。
60.以图10为例对本发明的具体实施例进行说明。下面以324mm口径自主式无人潜航器3kw水下无线电能传输系统为例进行说明。设计磁耦合器发射端磁芯尺寸w1=240mm,w2=220mm,发射端线圈外尺寸200mm*220mm,由litz线紧密绕制14匝。设计磁耦合器发射端磁芯尺寸l1=150mm,l2=80mm,h=40mm,l3=50mm,接收端线圈绕制在中部磁芯上,由litz线紧密绕制18匝,采用双层绕制方法,两层层间填充聚酰亚胺薄膜材料。设计发射端和接收端之间的传能距离为40~100mm,即为无线电能传输的距离。线圈由利兹线绕制,采用的励磁电流频率可以为20khz~200khz,更高的频率可以得到更强的传输能力,建议的利兹线规格为20khz~80khz选用单股线经0.1mm利兹线,80khz~200khz选用单股线经0.05mm的利兹线,随所需传输功率增加而加额,建议的最大线载流密度不超过4a/mm2。本实施例中选取工作频率85khz,选用利兹线规格为0.05*2500股,输出能力3000w。
61.发射端和接收端采用的磁芯均为客制化的铁基纳米晶软磁磁芯,初始磁导率为1400,外表经过绝缘加工处理,磁芯安装厚度建议2mm可以有效抑制大功率条件下的磁饱和现象。发射端和接收端的外壳采用加强化的有机尼龙pa66复合材料,可耐受500mpa深水压力。
62.产生的效果为:在85khz电流频率下,在-60mm~60mm的横滚偏移距离或在-50mm~50mm的前后未对准偏移距离下,系统耦合程度波动<10%,系统dc-dc传输效率均>90%。且在系统稳定运行和工作状态下,自主式无人潜航器内部电磁兼容性良好。
63.本实施例取得的效果示意图如图11、图12和图13所示。
64.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示
例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或n个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“n个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更n个用于实现定制逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本发明的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本发明的实施例所属技术领域的技术人员所理解。在流程图中表示或在此以其他方式描述的逻辑和/或步骤,例如,可以被认为是用于实现逻辑功能的可执行指令的定序列表,可以具体实现在任何计算机可读介质中,以供指令执行系统、装置或设备(如基于计算机的系统、包括处理器的系统或其他可以从指令执行系统、装置或设备取指令并执行指令的系统)使用,或结合这些指令执行系统、装置或设备而使用。就本说明书而言,"计算机可读介质"可以是任何可以包含、存储、通信、传播或传输程序以供指令执行系统、装置或设备或结合这些指令执行系统、装置或设备而使用的装置。计算机可读介质的更具体的示例(非穷尽性列表)包括以下:具有一个或n个布线的电连接部(电子装置),便携式计算机盘盒(磁装置),随机存取存储器(ram),只读存储器(rom),可擦除可编辑只读存储器(eprom或闪速存储器),光纤装置,以及便携式光盘只读存储器(cdrom)。另外,计算机可读介质甚至可以是可在其上打印所述程序的纸或其他合适的介质,因为可以例如通过对纸或其他介质进行光学扫描,接着进行编辑、解译或必要时以其他合适方式进行处理来以电子方式获得所述程序,然后将其存储在计算机存储器中。应当理解,本发明的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,n个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。如,如果用硬件来实现和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),现场可编程门阵列(fpga)等。
65.本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。此外,在本发明各个实施例中的各功能单元可以集成在一个处理模块中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。所述集成的模块如果以软件功能模块的形式实现并作为独立的产品销售或使用时,也可以存储在一个计算机可读取存储介质中。
66.以上所述仅是一种自主式无人潜航器无线电能传输的钟摆型抗偏移磁耦合系统的优选实施方式,一种自主式无人潜航器无线电能传输的钟摆型抗偏移磁耦合系统的保护
范围并不仅局限于上述实施例,凡属于该思路下的技术方案均属于本发明的保护范围。应当指出,对于本领域的技术人员来说,在不脱离本发明原理前提下的若干改进和变化,这些改进和变化也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。