1.本发明涉及车辆制动控制系统,具体而言,涉及一种可回收再利用制动能量的压雪车液压控制系统及其方法。
背景技术:
2.液驱静液传动技术具有无级变速的精细速度调节、容易实现正反转、能防止发动机超负荷运转以及可靠性高等优点,当前在压雪车等中、重型工程车辆上应用广泛。压雪车在进行推雪作业时,车辆启停频繁,制动与启动操作耗费大量系统能源,使得传统的压雪车不能很好地利用制动能量,能耗较大。而采用泵-马达闭式系统的压雪车液压驱动系统,是否能够从技术上实现启停过程中制动能量的回收和再利用,就是本领域技术人员需要面对和解决的技术问题。因此,迫切需要对采用泵-马达闭式系统的压雪车液压驱动系统设计一种控制系统及其控制策略,以便利用其制动时的制动能量,以提高车辆的燃油经济性。
技术实现要素:
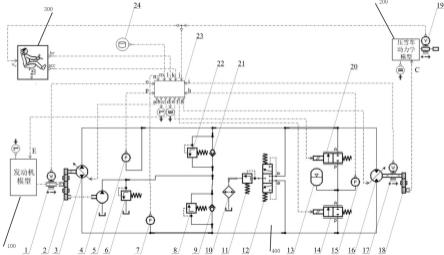
3.发明设计了一种可回收再利用制动能量的压雪车液压控制系统及其控制策略,通过合理地控制发动机和液压泵/马达之间的转矩分配,充分回收和再利用制动能量,实现压雪车液压系统的高效驱动。为此,本发明旨在提供一种可回收再利用制动能量的压雪车液压控制系统,包括:发动机模型(100)、分动箱(2)、电控变量泵—电控变量马达系统(400)、减速器(18)、压雪车动力学模型(200)、中心控制器(23)、车速控制器(24)和手动操作模型(300),所述发动机模型(100)的动力通过所述分动箱(2)传递给所述电控变量泵—电控变量马达系统(400),所述电控变量泵—电控变量马达系统(400)通过所述减速器(18)与所述压雪车动力学模型(200)连接;在所述发动机模型(100)和所述分动箱(2)之间的连接轴上布置有发动机转速传感(1),以检测压雪车发动机的转速,并将此转速传送给所述中心控制器(23);在所述电控变量泵—电控变量马达系统(400)和所述减速器(18)之间布置有马达转速传感器(17),以将所述电控变量马达(16)的转速传递给中心控制器(23)。
4.优先地是,所述电控变量泵—电控变量马达系统400进一步包括:电控变量泵(3)、补油泵(4)、压力传感器(5)、低压溢流阀(6)、压力传感(7)、溢流阀(8)、补油阀(9)、散热器(10)、回油背压阀(11)、冲洗阀(12)、蓄能器(13)、高速开关阀(14)、压力传感器(15)、电控变量马达(16)、高速开关阀(20)、补油阀(21)、溢流阀(22)。
5.优选地是,所述电控变量泵(3)为双向变量泵,输出流量接受所述中心控制器(23)的a端口控制;所述电控变量马达(16)的输出轴通过减速器(18)与压雪车动力学模型的主动轮连接;在所述电控变量泵—电控变量马达系统(400)的正向回路上,依次连接有压力传感器(5)、溢流阀(22)进口、补油阀(21)出口、冲洗阀(12)a口、高速开关阀(20)油口a、电控变量马达(16)正向油口;所述电控变量泵—电控变量马达系统(400)的反向回路与正向回路为对称关系,依次接接有压力传感器(7)、溢流阀(8)进口、补油阀(9)出口、冲洗阀(12)b口、高速开关阀(14)油口p、电控变量马达(16)反向油口;两溢流阀(8、22)的出口和补油阀
(9、21)的进口同时与补油泵(4)的出口连接,补油泵(4)的出口同时接低压溢流阀(6)的进口;两高速开关阀(14、20)的另一端油口与蓄能器(13)和压力传感器(15)连接。
6.优选地是,所述中心控制器(23)具有7个输出接口;其中,输出接口a用于电控变量泵(3)的排量控制,输出接口b用于发动机的油门位置控制,输出接口c用于发动机的启停控制,输出接口d用于压雪车的制动控制,输出接口e用于高速开关阀(20)控制,输出接口f用于高速开关阀(14)控制,输出接口g用于电控变量马达(16)的流量控制。
7.优选地是,所述中心控制器(23)具有9个输入接口;其中,输入接口h接受压力传感器(15)的压力信号输入,输入接口i接受电控变量马达转速传感器(17)的转速信号输入,输入接口j接受压雪车车速传感器(19)的速度信号输入,输入接口k接受手动操作模型(300)的加速踏板信号acc,输入接口l用于接受手动操作模型(300)的制动踏板信号br,输入接口m接受车速控制器(24)的速度控制信号,输入接口n接受压力传感器(7)的正向回路管道压力信号,输入接口o接受发动机转速传感器(1)的转速信号,输入接口p接受压力传感器(5)的反向回路管道压力信号。
8.优选的是,在车辆制动、下坡时,所述中心控制器(23)通过输出接口a控制电控变量泵(3)的排量为零,通过输出接口c控制发动机熄火;同时实时检测压力传感器(7)和压力传感器(15)的压力信号,电控变量马达(16)最大排量时,若蓄压器(13)的压力足以使电控变量马达(16)产生足够的制动力矩,则采用马达单独制动,此时输出接口d控制的车辆制动信号b为零;当电控变量马达(16)最大排量时,若电控变量马达(16)的制动力矩不足,则不足部分由中心控制器(23)产生并经输出接口d输入至车辆制动器。
9.优选地是,只有当所述压力传感器(7)的压力信号大于压力传感器(15)的压力信号时,才能打开所述高速开关阀(14),电控变量马达(16)反向油口所输出的油液进入蓄能器(13),所述蓄能器吸收了压雪车的制动能和位能,压力升高;当蓄能器压力上升至设定的极限值时,中心控制器(23)关闭高速开关阀(14),以避免压力过大对蓄能器的造成损坏,电控变量马达(16)输出的全部油液顶开溢流阀(8),并经补油阀(21)进入到正向回路,此时车辆的制动是靠溢流阀(8)的溢流压力反向作用在马达上而实现的。
10.优选地是,在车辆起动和加速时,中心控制器(23)首先计算蓄能器(13)中的压力能否满足电控变量马达(16)在最大排量时的输出扭矩符合驾驶员加速踏板acc的扭矩需求,若符合需求,则控制不启动发动机,打开高速开关阀(20),此时蓄能器(13)中的高压油驱动电控变量马达(16)输出扭矩;当蓄能器(13)压力不能满足驾驶员的加速扭矩需求时,中心控制器(23)通过接口c启动发动机,通过接口b输出一定的油门位置信号,通过接口a输出电控变量泵排量信号,此时发动机模型(100)和电控变量泵(3)工作,压力传感器(5)检测到的压力高于蓄能器(13)的压力后,中心控制器关闭高速开关阀(20)。
11.优选地是,所述中心控制器(23)具有多种工作模式:电控变量泵单独驱动模式、蓄能器单独驱动模式、电控变量马达再生制动模式、电控变量马达单独制动模式。
12.本发明还提供一种用于压雪车液压控制系统的控制方法,所述控制方法包括:首先将压雪车的加速和制动信号转换为车辆需求扭矩;其次,根据蓄能器的压力状态,计算蓄能器单独驱动模式所能提供的实时最大扭矩;最后,通过车辆需求扭矩和蓄能器的实时最大扭矩比较,来实现电控变量泵单独驱动模式、蓄能器单独驱动模式、电控变量马达再生制动模式、电控变量马达溢流制动模式和电控变量马达混合制动等工作模式的切换。
13.优选的是,,当tcommand》0时,比较蓄能器13的最大扭矩soc与压雪车的驱动需求扭矩tcommand的大小,如果soc 》 tcommand为y,则采用蓄能器13单独驱动,其提供所需的扭矩为tacc,其提供的范围为蓄能器13所能提供的最大扭矩tacmax之内,数学表达式为tacc=min(tcommand,taccrmax);如果soc 》 tcommand为n,即驱动需求扭矩大于蓄能器13单独驱动能提供的最大扭矩,则采用电控变量泵单独驱动,此时压雪车发动机提供力矩tengine,发动机带动电控变量泵工作,tengine等于tcommand,此时蓄能器13的输出力矩tacc=0,其中,soc表示蓄能器单独驱动能提供的最大扭矩soc,tcommand为压雪车的驱动需求扭矩。
14.优选的是,,当蓄能器的压力小于最大充压极限,制动需求扭矩大于零时,比较电控变量马达再生制动能提供的最大扭矩soc与电控变量马达16再生制动能提供的最大扭矩tcommand’的大小;如果soc《tcommand’为n,,则采用电控变量马达6单独制动,此时电控变量马达16提供的制动力矩tmotor等于tcommand’;如果soc《tcommand’为y,即制动需求扭矩值tcommand’大于电控变量马达能提供的最大扭矩soc,则采用电控变量马达16制动和机械制动的联合制动,此时电控变量马达16在其最大扭矩tmotormax下工作,机械制动器提供制动力矩tbrake,其用于消耗剩余制动扭矩tcommand
’‑
tmotormax;当蓄能器压力大于最大充压极限时,由溢流阀22单独制动,其中,soc表示电控变量马达16再生制动能提供的最大扭矩。
附图说明
15.本公开的各种实施例或样例(“示例”)在以下的具体实施方式和附图中得以公开。没必要将附图按比例绘制。一般而言,除非在权利要求中另有规定,否则可以任意顺序执行本发明所公开方法的操作。附图中:图1示出了根据本发明的一种可回收再利用制动能量的压雪车液压控制系统的配置图;图2是根据本发明的控制系统在驱动需求扭矩大于零时的控制流程;图3是根据本发明的控制系统在制动需求扭矩大于零时的控制流程。
具体实施方式
16.在详细解释本公开的一个或多个实施例之前,应当理解,实施例不限于它们具体应用中的构造细节,以及下文实施方式或附图所提出步骤或方法。下面将结合附图详细描述本发明的系统和方法。
17.图1示出了根据本发明的一种可回收再利用制动能量的压雪车液压控制系统的配置图。如图1所示,所述压雪车液压控制系统包括:发动机模型100、分动箱2、电控变量泵—电控变量马达系统400、减速器18、压雪车动力学模型200、中心控制器23、车速控制器24和手动操作模型300。发动机模型100的动力通过分动箱2传递给电控变量泵—电控变量马达系统400,电控变量泵—电控变量马达系统400通过减速器18与压雪车动力学模型200连接。在发动机模型100和分动箱2之间的连接轴上布置有发动机转速传感1,以检测压雪车发动机的转速,并将此转速传送给中心控制器23。在电控变量泵—电控变量马达系统400和减速器18之间布置有马达转速传感器17,以将此电控变量马达16的转速传递给中心控制器23。
进一步参考图1,图中实线部分所包围的部件大体上构成电控变量泵—电控变量马达系统400,其包括:电控变量泵3、补油泵4、压力传感器5、低压溢流阀6、压力传感7、溢流阀8、补油阀9、散热器10、回油背压阀11、冲洗阀12、蓄能器13、高速开关阀14、压力传感器15、电控变量马达16、高速开关阀20、补油阀21、溢流阀22。
18.进一步参考图1,发动机输出动力经分动箱2传递至电控变量泵3和补油泵4。电控变量泵3为双向变量泵,输出流量接受中心控制器23的a端口控制;电控变量泵3与电控变量马达16形成闭式连接;电控变量马达16的输出轴通过减速器18与压雪车动力学模型的主动轮连接;在电控变量泵—电控变量马达系统400的正向回路上,依次连接有压力传感器5、溢流阀22进口、补油阀21出口、冲洗阀12a口、高速开关阀20油口a、电控变量马达16正向油口;电控变量泵—电控变量马达系统400的反向回路与正向回路为对称关系,依次接接有压力传感器7、溢流阀8进口、补油阀9出口、冲洗阀b口、高速开关阀14油口p、电控变量马达16反向油口;两溢流阀8、22的出口和补油阀9、21的进口同时与补油泵4的出口连接,补油泵4的出口同时接低压溢流阀6的进口;两高速开关阀14、20的另一端油口与蓄能器13和压力传感器15连接。
19.现在,详细描述中心控制器23的输入和输出端信号及其连接关系。如图1所示,中心控制器23具有7个输出接口(a-g)和9个输入接口(h-p)。输出接口a用于电控变量泵3的排量控制,输出接口b用于发动机的油门位置控制,输出接口c用于发动机的启停控制,输出接口d用于压雪车的制动控制,输出接口e用于高速开关阀20控制,输出接口f用于高速开关阀14控制,输出接口g用于电控变量马达16的流量控制;输入接口h接受压力传感器15的压力信号输入,输入接口i接受电控变量马达转速传感器17的转速信号输入,输入接口j接受压雪车车速传感器19的速度信号输入,输入接口k接受手动操作模型300的加速踏板信号acc,输入接口l用于接受手动操作模型300的制动踏板信号br,输入接口m接受车速控制器24的速度控制信号,输入接口n接受压力传感器7的正向回路管道压力信号,输入接口o接受发动机转速传感器1的转速信号,输入接口p接受压力传感器5的反向回路管道压力信号。
20.通过实时检测驾驶员的加速、制动踏板信号、车速、液压系统压力及蓄能器压力等参数信息,依据控制策略实现对发动机、电控变量泵3、电控变量马达16和高速开关阀14、20的控制。
21.工作过程如下:在车辆制动、下坡时,中心控制器23通过输出接口a控制电控变量泵3的排量为零,通过输出接口c控制发动机熄火;同时实时检测压力传感器7和压力传感器15的压力信号,电控变量马达16最大排量时,若蓄压器13的压力足以使电控变量马达16产生足够的制动力矩,则采用马达单独制动,此时输出接口d控制的车辆制动信号b为零;当电控变量马达16最大排量时,若电控变量马达16的制动力矩不足,则不足部分由中心控制器23产生并经输出接口d输入至车辆制动器。在上述过程中,只有当压力传感器7的压力信号大于压力传感器15的压力信号时,才能打开高速开关阀14,电控变量马达16反向油口所输出的油液进入蓄能器13,蓄能器吸收了压雪车的制动能和位能,压力升高;当蓄能器压力上升至设定的极限值时,中心控制器23关闭高速开关阀14,避免压力过大对蓄能器的造成损坏,电控变量马达16输出的全部油液顶开溢流阀8,并经补油阀21进入到正向回路,此时车辆的制动是靠溢流阀8的溢流压力反向作用在马达上而实现的。
22.值得说明的是,当压雪车需要紧急制动时,不采用蓄能器制动,而是由中心控制器
23通过输出接口d直接给车辆施加紧急制动控制信号b。
23.在车辆起动和加速时,中心控制器23首先计算蓄能器13中的压力能否满足电控变量马达16在最大排量时的输出扭矩符合驾驶员加速踏板acc的扭矩需求,若符合需求,则控制不启动发动机,打开高速开关阀20,此时蓄能器13中的高压油驱动电控变量马达16输出扭矩;当蓄能器13压力不能满足驾驶员的加速扭矩需求时,中心控制器23通过接口c启动发动机,通过接口b输出一定的油门位置信号,通过接口a输出电控变量泵排量信号,此时发动机100和电控变量泵3工作,压力传感器5检测到的压力高于蓄能器13的压力后,中心控制器关闭高速开关阀20。在上述过程中,电控变量泵3始终处于工作状态,输出的油液经补油阀21或9向电控变量泵—电控变量马达400主回路中补油,用于补充由于电控变量泵3、电控变量马达16的泄漏油液以及冲洗阀12的回油;冲洗阀12只有在系统工作压力高于其设定的压力值时才开启工作,其用于将主油路中的部分热油经散热器直接接回油箱,防止油液温度过高。
24.压雪车在不同的行驶工况下,具有多种不同的工作模式,工作模式可以分为:电控变量泵3单独驱动模式、蓄能器13单独驱动模式、电控变量马达16再生制动模式、电控变量马达16单独制动模式。通过设计合理的控制策略,使压雪车工作在合适的工作模式下,对于提高燃油经济性至关重要。为此,需要设计相应的控制策略。
25.本发明设计的控制策略是将压雪车的加速和制动信号转换为车辆需求扭矩,并根据蓄能器13的压力状态,计算蓄能器13单独驱动模式所能提供的实时最大扭矩。通过车辆需求扭矩和蓄能器13的实时最大扭矩比较,来实现电控变量泵3单独驱动模式、蓄能器13单独驱动模式、电控变量马达16再生制动模式、电控变量马达16溢流制动模式和电控变量马达16混合制动等工作模式的切换。具体控制流程见下文所描述。
26.图2是本发明的驱动需求扭矩大于零时的控制流程。如图2所示,soc表示蓄能器13单独驱动能提供的最大扭矩soc,tcommand为压雪车的驱动需求扭矩。当tcommand》0时,比较蓄能器13的最大扭矩soc与压雪车的驱动需求扭矩tcommand的大小,如果soc 》 tcommand为y,则采用蓄能器13单独驱动,其提供所需的扭矩为tacc,其提供的范围为蓄能器13所能提供的最大扭矩tacmax之内,数学表达式为tacc=min(tcommand,taccrmax)。如果soc 》 tcommand为n,即驱动需求扭矩大于蓄能器13单独驱动能提供的最大扭矩,则采用电控变量泵3单独驱动,此时压雪车发动机提供力矩tengine,发动机带动电控变量泵3工作,即tengine等于tcommand,此时蓄能器13的输出力矩tacc=0。
27.图3是本发明的制动需求扭矩大于零时的控制流程。如图3所示,tcommand’表示当压雪车处于制动阶段时的制动需求扭矩,soc表示电控变量马达16再生制动能提供的最大扭矩。当蓄能器13的压力小于最大充压极限,制动需求扭矩大于零(tcommand’》0)时,比较电控变量马达16再生制动能提供的最大扭矩soc与电控变量马达16再生制动能提供的最大扭矩tcommand’的大小。如果soc《tcommand’为n,即制动需求扭矩值tcommand’小于电控变量马达16能提供的最大扭矩soc,则采用电控变量马达16单独制动,此时电控变量马达16提供的制动力矩tmotor等于tcommand’;如果soc《tcommand’为y,即制动需求扭矩值tcommand’大于电控变量马达16能提供的最大扭矩soc,则采用电控变量马达16制动和机械制动的联合制动,此时电控变量马达16在其最大扭矩tmotormax下工作,机械制动器提供制动力矩tbrake,其用于消耗剩余制动扭矩tcommand
’‑
tmotormax;当蓄能器压力大于最大充
压极限时,由溢流阀22单独制动。
28.尽管已经参考附图所示的实施例描述了本发明,但是可在不脱离权利要求范围的情况下使用等同或替代手段。本发明所描述和图示的组件仅仅是可以用于实现本公开的实施例的系统/设备和方法的示例,并且可以在不脱离权利要求范围的情况下用其他设备和组件进行替换。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。