1.本发明涉及仿生机器人的技术领域,尤其涉及一种水陆两栖仿生机器人。
背景技术:
2.仿生机器人通过模仿生物的结构和行为,让机器人更好地适应自然,并在复杂的场景中完成特定任务。水陆两栖仿生机器人能够在崎岖陆地及水下复杂环境中运行,在科学考察、灾害救援和军事侦察等领域具有广阔的应用前景。当前,国内外对两栖仿生机器人的研究多有局限,比如陆地越障能力不足,水下运行姿态僵硬,需要复杂的驱动系统来完成水、陆驱动机构的切换,环境适应性差等。
技术实现要素:
3.有鉴于此,本发明的实施例提供了一种水陆两栖仿生机器人,旨在解决现有两栖仿生机器人存在的陆地越障能力不足、水下运行姿态僵硬环境适应性差的问题。
4.本发明的实施例提供一种水陆两栖仿生机器人,包括至少两节躯干部、连接相邻两节所述躯干部的关节部和尾部螺旋桨结构;其中,
5.每一所述躯干部均包括外壳、框架体、腿部结构和中部螺旋桨结构,所述外壳密封包裹于所述框架体的外侧,所述腿部结构包括两个转动体及驱动装置,两个所述转动体绕左右向轴线转动设于所述框架体的左右两侧,所述驱动装置连接两个所述转动体及所述框架体,用于驱动两个所述转动体转动,所述中部螺旋桨结构绕上下向轴线转动设于所述框架体的中部位置;
6.所述关节部包括连接座、至少一个第一齿轮组、至少一个第二齿轮组和第二驱动组件,所述第一齿轮组包括相啮合的第一主齿轮和第一副齿轮,所述第一主齿轮绕上下向轴线转动设于所述连接座上,所述第一副齿轮固定于所述框架体的后端部上,所述第二齿轮组包括相啮合的第二主齿轮和第二副齿轮,所述第二主齿轮绕左右向轴线转动设于所述连接座上,所述第二副齿轮固定于所述框架体的前端部上,所述第二驱动组件用于驱动所述第一主齿轮和所述第二主齿轮转动;
7.所述尾部螺旋桨结构包括至少一个第一螺旋叶片和第三驱动组件,所述第一螺旋叶片绕前后向轴线转动设于位于前后向最后端的所述躯干部的所述框架体上,所述第三驱动组件设于所述框架体上,用于驱动所述第一螺旋叶片转动。
8.可选地,所述框架体上设有沿左右向贯穿的第一通孔;
9.所述驱动装置包括两个第一驱动组件,两个所述第一驱动组件分别对应连接两个所述转动体;
10.每一所述第一驱动组件均包括同轴依次连接的第一电磁离合器、减速器、直流无刷电机、第二电磁离合器和第一轴承,所述第一电磁离合器与所述转动体连接,所述第一轴承安装于所述第一通孔内。
11.可选地,所述框架体上设有沿上下向贯穿的第二通孔,所述第一通孔与所述第二
通孔交叉,所述中部螺旋桨结构包括至少一个第二螺旋叶片;
12.所述驱动装置还包括第一转动轴、第二转动轴、第一锥齿轮、第二锥齿轮和两个第二轴承,所述第一转动轴安装于其中一个所述第二电磁离合器的输出孔内,所述第一锥齿轮固定于所述第一转动轴的端部,所述第二转动轴穿设于所述第二通孔内,所述第二螺旋叶片和第二锥齿轮均固定在所述第二转动轴上,所述第二锥齿轮与所述第一锥齿轮相啮合,两个所述第二轴承安装于所述第二转轴的端部,并安装于所述第二通孔内。
13.可选地,位于前后向最后端的所述躯干部为第一躯干部,对应的所述框架体为第一框架体,所述第一框架体上设有沿左右向贯穿的第三通孔,所述第三通孔位于所述第一通孔的后端;
14.所述第三驱动组件包括:
15.第三转动轴,转动安装于所述第三通孔内;;
16.两个第三轴承,分设于所述第三转轴的两端,并安装于所述第三通孔内;
17.第四转动轴,沿前后向延伸转动设于所述第一框架体的后端,所述第四转动轴的后端连接所述第一螺旋叶片;
18.第三锥齿轮,固定设于所述第三转动轴上;
19.第四锥齿轮,固定设于所述第四转动轴的前端,所述第四锥齿轮与所述第三锥齿轮相啮合;以及,
20.第一皮带组件,包括两个第一皮带轮和第一皮带,两个所述第一皮带轮分别安装在所述第三转动轴的一端和远离所述第一转动轴一端的所述第二电磁离合器上,所述第一皮带绕设于两个所述第一皮带轮上。
21.可选地,所述第一螺旋叶片设有两个,所述尾部螺旋桨结构还包括两个螺旋桨仓;
22.所述第三驱动组件还包括:
23.两个第二皮带轮,两个所述第二皮带轮同轴固定在所述第四转动轴上;
24.两个第三皮带轮,两个所述第三皮带轮沿左右向间隔设于所述第二皮带轮的两侧;
25.两个第二皮带,两个所述第二皮带分别绕设在所述第二皮带轮和所述第三皮带轮上;以及,
26.两个第五转动轴,分别与两个所述第三皮带轮固定连接,并向后延伸设置,每一所述第五转动轴上均安装一个所述第一螺旋叶片和一个所述螺旋桨仓,所述螺旋桨仓位于所述第一螺旋叶片的后方。
27.可选地,所述第一齿轮组和所述第二齿轮组均设有两个,两个所述第一齿轮组沿上下向间隔并行设置,两个所述第二齿轮组沿左右向间隔并行设置。
28.可选地,所述连接座包括两个第一耳板和两个第二耳板,两个所述第一耳板沿上下向间隔并行安装于所述连接座的前端,两个所述第二耳板沿左右向间隔并行安装于所述连接座的后端;两个所述第一耳板上沿上下向贯设有第一连接孔,两个所述第二耳板上沿左右向贯设有第二连接孔;
29.所述框架体的前端部和后端部均设有第三耳板,所述第三耳板上设有第三连接孔,位于后端部的第三耳板插设于两个所述第一耳板之间,位于前端部的第三耳板插设于两个所述第二耳板之间;
30.所述第二驱动组件包括第一双轴电机、第二双轴电机和四个法兰盘,所述第一双轴电机设于所述第一连接孔和第三连接孔内,所述第一双轴电机的两端通过两个所述法兰盘与两个所述第一耳板固定连接,所述第一双轴电机两端的输出轴分别与两个所述第一主齿轮固定连接,所述第二双轴电机的两端通过两个所述法兰盘与两个所述第二耳板固定连接,所述第二双轴电机两端的输出轴分别与两个所述第二主齿轮固定连接。
31.可选地,所述转动体为圆弧板,所述弧形板的端部设有圆环体,所述圆环体与所述驱动装置连接。
32.可选地,所述转动体为车轮。
33.可选地,所述关节部还包括橡胶管和密封圈,所述橡胶管套设于所述连接座的外部,所述橡胶管的两端通过密封圈与所述外壳密封连接。
34.本发明的实施例提供的技术方案带来的有益效果是:本发明的水陆两栖仿生机器人在陆地上爬行时,对于较小障碍可以直接通过第一齿轮组抬头越过,对于较大障碍可以通过第二齿轮组转向绕过。在水下游动时,尾部螺旋桨结构旋转提供矢量推进力,关节部使躯干左右摆动实现水中转向,中部螺旋桨结构实现机器人的上浮和下潜,具有陆地越障能力强,水下运行姿态灵活的特点。
附图说明
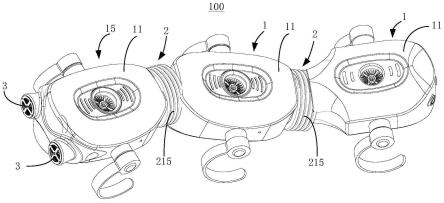
35.图1是本发明提供的水陆两栖仿生机器人一实施例的结构示意图;
36.图2是图1中的去除外壳后的内部结构示意图;
37.图3是图2中的a部分放大示意图;
38.图4是图2中的连接座与第一主齿轮和第二主齿轮的安装示意图;
39.图5是图2中的连接座的结构示意图;
40.图6是图2中的第一框架体的结构示意图;
41.图7是图2中的腿部结构与中部螺旋桨结构的安装示意图;
42.图8是图2中的腿部结构与尾部螺旋桨结构的安装示意图;
43.图9是水陆两栖仿生机器人做抬头运动的示意图;
44.图10是水陆两栖仿生机器人做蜿蜒运动的示意图。
45.图中:水陆两栖仿生机器人100、躯干部1、外壳11、框架体12、第一通孔121、第二通孔122、第三通孔123、第三耳板124、第三连接孔125、腿部结构13、转动体131、驱动装置132、第一电磁离合器132a、减速器132b、直流无刷电机132c、第二电磁离合器132d、第一轴承132e、第一转动轴132f、第二转动轴132g、第一锥齿轮132h、第二锥齿轮132i、第二轴承132j、中部螺旋桨结构14、第二螺旋叶片141、第一躯干部15、第一框架体151、关节部2、连接座21、第一耳板211、第二耳板212、第一连接孔213、第二连接孔214、橡胶管215、第一齿轮组22、第一主齿轮221、第一副齿轮222、第二齿轮组23、第二主齿轮231、第二副齿轮232、第二驱动组件24、第一双轴电机241、第二双轴电机242、法兰盘243、尾部螺旋桨结构3、第一螺旋叶片31、第三驱动组件32、第三转动轴321、第三轴承322、第四转动轴323、第三锥齿轮324、第四锥齿轮325、第一皮带组件326、第一皮带轮326a、第一皮带326b、第二皮带轮327、第三皮带轮328、第二皮带329、第五转动轴330、螺旋桨仓33。
具体实施方式
46.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地描述。
47.请参考图1-图10所示,本发明的实施例提供的一种水陆两栖仿生机器人100,参照图1和图2所示,包括至少两节躯干部1、连接相邻两节所述躯干部1的关节部2和尾部螺旋桨结构3;其中,每一所述躯干部1均包括外壳11、框架体12、腿部结构13和中部螺旋桨结构14,所述外壳11密封包裹于所述框架体12的外侧,所述腿部结构13包括两个转动体131及驱动装置132,两个所述转动体131绕左右向轴线转动设于所述框架体12的左右两侧,所述驱动装置132连接两个所述转动体131及所述框架体12,用于驱动两个所述转动体131转动,所述中部螺旋桨结构14绕上下向轴线转动设于所述框架体12的中部位置。
48.通过驱动装置132驱动两个转动体131在框架体12的左右两边转动,可以实现躯干部1在陆地上的爬行,具有良好的越野性能;同时,在框架体12的中部位置安装螺旋桨结构,有助于躯干部1在水下实现上浮和下潜的动作。通过设置关节部2将多节躯干部1连接,可以根据实际需要来定水陆两栖仿生机器人100的长度。
49.参照图3所示,所述关节部2包括连接座21、至少一个第一齿轮组22、至少一个第二齿轮组23和第二驱动组件24,所述第一齿轮组22包括相啮合的第一主齿轮221和第一副齿轮222,所述第一主齿轮221绕上下向轴线转动设于所述连接座21上,所述第一副齿轮222固定于所述框架体12的后端部上,所述第二齿轮组23包括相啮合的第二主齿轮231和第二副齿轮232,所述第二主齿轮231绕左右向轴线转动设于所述连接座21上,所述第二副齿轮232固定于所述框架体12的前端部上,所述第二驱动组件24用于驱动所述第一主齿轮221和所述第二主齿轮231转动。
50.关节部2通过在上下轴线方向转动设置的第一齿轮组22实现躯干部1在左右方向的转向功能,通过在左右轴线方向转动设置的第二齿轮组23实现躯干部1在上下方向的抬头和低头的功能,以使得水陆两栖仿生机器人100在陆地具有越障功能和转弯功能,在水下具有巡游、下潜和上升的功能。
51.参照图2所示,所述尾部螺旋桨结构3包括至少一个第一螺旋叶片31和第三驱动组件32,所述第一螺旋叶片31绕前后向轴线转动设于位于前后向最后端的所述躯干部1的所述框架体12上,所述第三驱动组件32设于所述框架体12上,用于驱动所述第一螺旋叶片31转动。
52.通过设置尾部螺旋桨结构3,可以使得水陆两栖仿生机器人100在水下通过第一螺旋叶片31的转动,为躯干部1提供向前的推进力,再结合关节部2使得躯干部1实现左右摆动实现水中转向。
53.本发明提供的水陆两栖仿生机器人100,在陆地上爬行时,对于较小障碍可以直接通过第一齿轮组22抬头越过,对于较大障碍可以通过第二齿轮组23转向绕过。在水下游动时,尾部螺旋桨结构3旋转提供矢量推进力,关节部2使躯干左右摆动实现水中转向,中部螺旋桨结构14实现机器人的上浮和下潜,具有陆地越障能力强,水下运行姿态灵活的特点。
54.具体地,在本实施例中,参照图6和图7所示,所述框架体12上设有沿左右向贯穿的第一通孔121;所述驱动装置132包括两个第一驱动组件,两个所述第一驱动组件分别对应连接两个所述转动体131;每一所述第一驱动组件均包括同轴依次连接的第一电磁离合器
132a、减速器132b、直流无刷电机132c、第二电磁离合器132d和第一轴承132e,所述第一电磁离合器132a与所述转动体131连接,所述第一轴承132e安装于所述第一通孔121内。
55.通过直流无刷电机132c和减速器132b的转动,为转动体131提供驱动力,同时,设置第一电磁离合器132a和第二电磁离合器132d,有助于控制转动体131的转动与静止,可以根据水陆两栖不同环境的需要来控制转动体131的运动情况。
56.进一步地,参照图7所示,所述框架体12上设有沿上下向贯穿的第二通孔122,所述第一通孔121与所述第二通孔122交叉,所述中部螺旋桨结构14包括至少一个第二螺旋叶片141;所述驱动装置132还包括第一转动轴132f、第二转动轴132g、第一锥齿轮132h、第二锥齿轮132i和两个第二轴承132j,所述第一转动轴132f安装于其中一个所述第二电磁离合器132d的输出孔内,所述第一锥齿轮132h固定于所述第一转动轴132f的端部,所述第二转动轴132g穿设于所述第二通孔122内,所述第二螺旋叶片141和第二锥齿轮132i均固定在所述第二转动轴132g上,所述第二锥齿轮132i与所述第一锥齿轮132h相啮合,两个所述第二轴承132j安装于所述第二转轴的端部,并安装于所述第二通孔122内。
57.在第二电磁离合器132d处设置第一转动轴132f,可以利用直流无刷电机132c的驱动力和第二电磁离合器132d的通断来控制第一转轴的转动与静止,当在陆地活动时,通过控制第一电磁离合器132a将转动体131与直流无刷电机132c连通进行驱动,当在水下运动时,通过控制第二电磁离合器132d将直流无刷电机132c与第一转动轴132f连通,从而第一转动轴132f在直流无刷电机132c的驱动下带动第一锥齿轮132h转动,进而带动与之啮合的第二锥齿轮132i转动,再带动第二转轴转动,从而实现第二螺旋叶片141的转动,从而为躯干部1提供上下方向上的推动力,使得躯干部1在水下可以实现上浮和下潜运动。
58.此处,第二转动轴132g上也可以设置多个第二螺旋叶片141,可以起到增强推动力的作用,本实施例中,在第二转动轴132g的上下方向设置两个螺旋叶片。
59.在其他实施例中,转动体131和第二螺旋叶片141可以分别由不同的电机驱动。相较于转动体131和第二螺旋叶片141分开驱动的驱动方式,本实施例中的驱动装置132更加简单,仅需要借助转动体131的驱动电机就可以完成水、陆驱动机构的切换,环境适应性强。而且框架体12左右两边的转动体131分开驱动,可以在行驶时,多个躯干部1上的转动体131间隔运动,无需全部转动,也有助于越障。当然,也可以设置为两边转动体131通过轴连接,再通过电机驱动齿轮副的传动方式来驱动转动体131转动,此处,不做过多赘述,也不做限制。
60.进一步地,参照图6和图8所示,位于前后向最后端的所述躯干部1为第一躯干部15,对应的所述框架体12为第一框架体151,所述第一框架体151上设有沿左右向贯穿的第三通孔123,所述第三通孔123位于所述第一通孔121的后端;所述第三驱动组件32包括第三转动轴321、两个第三轴承322、第四转动轴323、第三锥齿轮324、第四锥齿轮325和第一皮带326b组,第三转动轴321转动安装于所述第三通孔123内;两个第三轴承322分设于所述第三转轴的两端,并安装于所述第三通孔123内;第四转动轴323沿前后向延伸转动设于所述第一框架体151的后端,所述第四转动轴323的后端连接所述第一螺旋叶片31;第三锥齿轮324固定设于所述第三转动轴321上;第四锥齿轮325固定设于所述第四转动轴323的前端,所述第四锥齿轮325与所述第三锥齿轮324相啮合;第一皮带组件326包括两个第一皮带轮326a和第一皮带326b,两个所述第一皮带轮326a分别安装在所述第三转动轴321的一端和远离
所述第一转动轴132f一端的所述第二电磁离合器132d上,所述第一皮带326b绕设于两个所述第一皮带轮326a上。
61.通过设置第一皮带组件326、第三锥齿轮324和第四锥齿轮325配合形成的传动机构,可以利用驱动转动体131转动的直流无刷电机132c来驱动第一皮带轮326a转动,在由皮带传送至第三转动轴321上,由第三转动轴321的转动带动第三锥齿轮324转动,再带动与之啮合的第四锥齿轮325转动,从而带动第一螺旋叶片31转动,为躯干部1提供向前的推进力。本实施例中的驱动装置132更加简单,仅需要借助转动体131的直流无刷电机132c就可以完成水、陆驱动机构的切换,环境适应性强。
62.当然,此处,也可以在第一螺旋叶片31上单独设置驱动电机来驱动其转动,此处不做限制。
63.更进一步地,所述第一螺旋叶片31设有两个,所述尾部螺旋桨结构3还包括两个螺旋桨仓33;所述第三驱动组件32还包括两个第二皮带轮327、两个第三皮带轮328、两个第二皮带329和两个第五转动轴330,两个所述第二皮带轮327同轴固定在所述第四转动轴323上;两个所述第三皮带轮328沿左右向间隔设于所述第二皮带轮327的两侧;两个所述第二皮带329分别绕设在所述第二皮带轮327和所述第三皮带轮328上;以及,两个第五转动轴330分别与两个所述第三皮带轮328固定连接,并向后延伸设置,每一所述第五转动轴330上均安装一个所述第一螺旋叶片31和一个所述螺旋桨仓33,所述螺旋桨仓33位于所述第一螺旋叶片31的后方。
64.通过设置两组第二皮带轮327、第三皮带轮328和第二皮带329的传动装置,利用第五转动轴330来连接两个第一螺旋叶片31,由一个直流无刷电机132c可以同时驱动两个第一螺旋叶片31的转动,可以增强向前的推进力,同时,配合第二电磁离合器132d的作用,可以实现水、陆驱动机构的切换,环境适应性强。
65.进一步地,所述第一齿轮组22和所述第二齿轮组23均设有两个,两个所述第一齿轮组22沿上下向间隔并行设置,两个所述第二齿轮组23沿左右向间隔并行设置。
66.通过设置两个第一齿轮组22和两个第二齿轮组23,有助于提高躯干部1抬头运动和转向运动的稳定性。
67.具体地,参照图4和图5所示,所述连接座21包括两个第一耳板211和两个第二耳板212,两个所述第一耳板211沿上下向间隔并行安装于所述连接座21的前端,两个所述第二耳板212沿左右向间隔并行安装于所述连接座21的后端;两个所述第一耳板211上沿上下向贯设有第一连接孔213,两个所述第二耳板212上沿左右向贯设有第二连接孔214;所述框架体12的前端部和后端部均设有第三耳板124,所述第三耳板124上设有第三连接孔125,位于后端部的第三耳板124插设于两个所述第一耳板211之间,位于前端部的第三耳板124插设于两个所述第二耳板212之间;所述第二驱动组件24包括第一双轴电机241、第二双轴电机242和四个法兰盘243,所述第一双轴电机241设于所述第一连接孔213和第三连接孔125内,所述第一双轴电机241的两端通过两个所述法兰盘243与两个所述第一耳板211固定连接,所述第一双轴电机241两端的输出轴分别与两个所述第一主齿轮221固定连接,所述第二双轴电机242的两端通过两个所述法兰盘243与两个所述第二耳板212固定连接,所述第二双轴电机242两端的输出轴分别与两个所述第二主齿轮231固定连接。
68.通过巧妙的设计连接座21的造型,可以同时安装两个第一主齿轮221和两个第二
主齿轮231,并在中间安装第一双轴电机241同时驱动两个第一主齿轮221转动,第二双轴电机242同时驱动两个第二主齿轮231转动,再通过第三耳板124套设在第一双轴电机241和第二双轴电机242的外侧,配合第一主齿轮221与第一副齿轮222的啮合,第二主齿轮231与第二副齿轮232的啮合,可以连接相邻的两个框架体12,实现前后两个躯干部1的转向和抬头作用,这种驱动结构简单,设计巧妙。
69.进一步地,所述转动体131为圆弧板,所述弧形板的端部设有圆环体,所述圆环体与所述驱动装置132连接。弧形板制成的转动体131更适合在崎岖的路面行走,有助于提高越障功能。本实施例中,弧形板是利用高模量弹性材料制成的半圆形弹性机械足,底部粘有橡胶条,可以降低机械组与地面接触产生的磨损,同时使机械足产生更好的弹性。
70.进一步地,所述转动体131为车轮,车轮在平坦的路面行走效果会更好。
71.在实际使用过程中,可以根据使用环境更换转动体131的类型。
72.进一步地,参照图1所示,所述关节部2还包括橡胶管215和密封圈,所述橡胶管215套设于所述连接座21的外部,所述橡胶管215的两端通过密封圈与所述外壳11密封连接。通过设置橡胶管215、密封圈和外壳11,有助于提高机身整体的密封性,同时,橡胶管215设置在关节处,也不会影响机器人的转弯、抬头等运动。
73.本发明的水陆两栖仿生机器人100有陆地爬行和水下游动两种工作模式,以三节躯干部1为例进行说明,具体工作方式如下:
74.陆地爬行模式时,在程序控制下,第一电磁离合器132a通电接合,第二电磁离合器132d断电分离,此时直流无刷电机132c带动转动体131转动,而中部螺旋桨结构14不转动。控制关节部2中双轴电机的转动,实现机器人蜿蜒运动、抬头运动和越障运动。图9是水陆两栖仿生机器人做抬头运动的示意图;
75.图10是水陆两栖仿生机器人做蜿蜒运动的示意图。基于每个转动体131采用一个直流无刷电机132c独立进行控制的分布式电机控制方案,独立和协调控制机器人驱动装置132,机器人具有四种陆地爬行步态,分别是三足步态、四足步态、六足步态和转弯步态。三足步态是机器人始终由不相邻的三个转动体131支撑;四足步态是机器人始终有四个转动体131支撑,且每一侧有两个转动体131;六足步态是机器人六个转动体131动作一致,同时处于支撑状态或者非支撑状态;转弯步态是调节机器人各关节部2双轴电机实现转向。针对不同的环境、任务采用不同步态运动。
76.水下游动模式时,机器人的转动体131不工作,在程序控制下,第一电磁离合器132a断电分离,第二电磁离合器132d通电接合,此时直流无刷电机132c带动螺旋桨转动,而弧形腿不再转动,通过控制直流无刷电机132c来控制三个中部螺旋桨结构14和尾部螺旋桨结构3的转动。机器人具有巡游姿态、下潜姿态、上升姿态和转弯姿态。其中机器人依靠尾部螺旋桨结构3旋转时产生的矢量推进力保持机器人巡游运动状态,依靠中部螺旋桨结构14的旋转实现机器人的上浮和下潜。控制关节部2中的第一双轴电机241和第二双轴电机242的转动,依靠机器人首关节左右转向实现转弯姿态。
77.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
78.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
79.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。