技术特征:
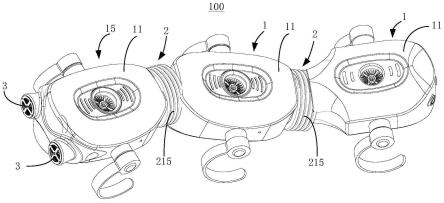
1.一种水陆两栖仿生机器人,其特征在于,包括至少两节躯干部、连接相邻两节所述躯干部的关节部和尾部螺旋桨结构;其中,每一所述躯干部均包括外壳、框架体、腿部结构和中部螺旋桨结构,所述外壳密封包裹于所述框架体的外侧,所述腿部结构包括两个转动体及驱动装置,两个所述转动体绕左右向轴线转动设于所述框架体的左右两侧,所述驱动装置连接两个所述转动体及所述框架体,用于驱动两个所述转动体转动,所述中部螺旋桨结构绕上下向轴线转动设于所述框架体的中部位置;所述关节部包括连接座、至少一个第一齿轮组、至少一个第二齿轮组和第二驱动组件,所述第一齿轮组包括相啮合的第一主齿轮和第一副齿轮,所述第一主齿轮绕上下向轴线转动设于所述连接座上,所述第一副齿轮固定于所述框架体的后端部上,所述第二齿轮组包括相啮合的第二主齿轮和第二副齿轮,所述第二主齿轮绕左右向轴线转动设于所述连接座上,所述第二副齿轮固定于所述框架体的前端部上,所述第二驱动组件用于驱动所述第一主齿轮和所述第二主齿轮转动;所述尾部螺旋桨结构包括至少一个第一螺旋叶片和第三驱动组件,所述第一螺旋叶片绕前后向轴线转动设于位于前后向最后端的所述躯干部的所述框架体上,所述第三驱动组件设于所述框架体上,用于驱动所述第一螺旋叶片转动。2.如权利要求1所述的水陆两栖仿生机器人,其特征在于,所述框架体上设有沿左右向贯穿的第一通孔;所述驱动装置包括两个第一驱动组件,两个所述第一驱动组件分别对应连接两个所述转动体;每一所述第一驱动组件均包括同轴依次连接的第一电磁离合器、减速器、直流无刷电机、第二电磁离合器和第一轴承,所述第一电磁离合器与所述转动体连接,所述第一轴承安装于所述第一通孔内。3.如权利要求2所述的水陆两栖仿生机器人,其特征在于,所述框架体上设有沿上下向贯穿的第二通孔,所述第一通孔与所述第二通孔交叉,所述中部螺旋桨结构包括至少一个第二螺旋叶片;所述驱动装置还包括第一转动轴、第二转动轴、第一锥齿轮、第二锥齿轮和两个第二轴承,所述第一转动轴安装于其中一个所述第二电磁离合器的输出孔内,所述第一锥齿轮固定于所述第一转动轴的端部,所述第二转动轴穿设于所述第二通孔内,所述第二螺旋叶片和第二锥齿轮均固定在所述第二转动轴上,所述第二锥齿轮与所述第一锥齿轮相啮合,两个所述第二轴承安装于所述第二转轴的端部,并安装于所述第二通孔内。4.如权利要求3所述的水陆两栖仿生机器人,其特征在于,位于前后向最后端的所述躯干部为第一躯干部,对应的所述框架体为第一框架体,所述第一框架体上设有沿左右向贯穿的第三通孔,所述第三通孔位于所述第一通孔的后端;所述第三驱动组件包括:第三转动轴,转动安装于所述第三通孔内;两个第三轴承,分设于所述第三转轴的两端,并安装于所述第三通孔内;第四转动轴,沿前后向延伸转动设于所述第一框架体的后端,所述第四转动轴的后端连接所述第一螺旋叶片;
第三锥齿轮,固定设于所述第三转动轴上;第四锥齿轮,固定设于所述第四转动轴的前端,所述第四锥齿轮与所述第三锥齿轮相啮合;以及,第一皮带组件,包括两个第一皮带轮和第一皮带,两个所述第一皮带轮分别安装在所述第三转动轴的一端和远离所述第一转动轴一端的所述第二电磁离合器上,所述第一皮带绕设于两个所述第一皮带轮上。5.如权利要求4所述的水陆两栖仿生机器人,其特征在于,所述第一螺旋叶片设有两个,所述尾部螺旋桨结构还包括两个螺旋桨仓;所述第三驱动组件还包括:两个第二皮带轮,两个所述第二皮带轮同轴固定在所述第四转动轴上;两个第三皮带轮,两个所述第三皮带轮沿左右向间隔设于所述第二皮带轮的两侧;两个第二皮带,两个所述第二皮带分别绕设在所述第二皮带轮和所述第三皮带轮上;以及,两个第五转动轴,分别与两个所述第三皮带轮固定连接,并向后延伸设置,每一所述第五转动轴上均安装一个所述第一螺旋叶片和一个所述螺旋桨仓,所述螺旋桨仓位于所述第一螺旋叶片的后方。6.如权利要求1所述的水陆两栖仿生机器人,其特征在于,所述第一齿轮组和所述第二齿轮组均设有两个,两个所述第一齿轮组沿上下向间隔并行设置,两个所述第二齿轮组沿左右向间隔并行设置。7.如权利要求6所述的水陆两栖仿生机器人,其特征在于,所述连接座包括两个第一耳板和两个第二耳板,两个所述第一耳板沿上下向间隔并行安装于所述连接座的前端,两个所述第二耳板沿左右向间隔并行安装于所述连接座的后端;两个所述第一耳板上沿上下向贯设有第一连接孔,两个所述第二耳板上沿左右向贯设有第二连接孔;所述框架体的前端部和后端部均设有第三耳板,所述第三耳板上设有第三连接孔,位于后端部的第三耳板插设于两个所述第一耳板之间,位于前端部的第三耳板插设于两个所述第二耳板之间;所述第二驱动组件包括第一双轴电机、第二双轴电机和四个法兰盘,所述第一双轴电机设于所述第一连接孔和第三连接孔内,所述第一双轴电机的两端通过两个所述法兰盘与两个所述第一耳板固定连接,所述第一双轴电机两端的输出轴分别与两个所述第一主齿轮固定连接,所述第二双轴电机的两端通过两个所述法兰盘与两个所述第二耳板固定连接,所述第二双轴电机两端的输出轴分别与两个所述第二主齿轮固定连接。8.如权利要求1所述的水陆两栖仿生机器人,其特征在于,所述转动体为圆弧板,所述弧形板的端部设有圆环体,所述圆环体与所述驱动装置连接。9.如权利要求1所述的水陆两栖仿生机器人,其特征在于,所述转动体为车轮。10.如权利要求1所述的水陆两栖仿生机器人,其特征在于,所述关节部还包括橡胶管和密封圈,所述橡胶管套设于所述连接座的外部,所述橡胶管的两端通过密封圈与所述外壳密封连接。
技术总结
本发明提供一种水陆两栖仿生机器人,包括至少两节躯干部、连接相邻两节躯干部的关节部和尾部螺旋桨结构;躯干部中外壳密封包裹于框架体的外侧,腿部结构包括绕左右向轴线转动设于框架体左右两侧的转动体和驱动装置,中部螺旋桨结构绕上下向轴线转动设于框架体的中部位置;关节部中的第一齿轮组包括相啮合的第一主齿轮和第一副齿轮,第一主齿轮绕上下向轴线转动设于连接座上,第一副齿轮固定于框架体的后端部,第二齿轮组包括相啮合的第二主齿轮和第二副齿轮,第二主齿轮绕左右向轴线转动设于连接座上,第二副齿轮固定于框架体的前端部;尾部螺旋桨结构中的第一螺旋叶片绕前后向轴线转动设于位于前后向最后端的躯干部的框架体上。体上。体上。
技术研发人员:张洺驿 王亚午 孟庆鑫 吴俊东 黄鹏
受保护的技术使用者:中国地质大学(武汉)
技术研发日:2022.07.11
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。