1.本发明属于金属铸造的技术领域,涉及一种双工位机器人自动化打磨抛光系统。
背景技术:
2.金属铸造是制造业中必不可少的领域之一,铸造工艺可分为三个基本步骤:铸造金属准备、铸件造型和铸件处理。铸件从浇注冷却的铸型中取出后,有浇口、冒口及金属毛刺、披缝,硅溶胶铸造的铸件质量要求很高,所以必须经处理工序后才能使铸件达到质量要求。在进行铸件处理工序时,对于浇冒口余根、飞边、毛刺等突出物的自动化打磨去除及精整抛光还没有成熟的工艺装备,只能采用人工应用砂轮或砂带的单一方式进行打磨或抛光。
3.背景技术的缺陷:
4.高锰钢履带板铸造后零件浇口表面存在内浇口余根和飞边,在产品交检前必须对浇口的余根和飞边进行打磨修整。目前清理打磨工序全部采用手工作业,由人工搬运铸件至工作工位,然后手持铸件利用固定砂带对铸件内浇口余根和飞边进行打磨,存在安全隐患大、职业病危害概率大、环境污染严重、人工成本高、产品质量和生产效率低等问题。
技术实现要素:
5.本发明的目的是提供一种双工位机器人自动化打磨抛光系统,为一种针对高锰钢履带板的双工位机器人自动化打磨抛光系统,有效解决铸件打磨过程中存在的安全系数低、劳动强度高、灰尘和噪声大、招工难、效率低、质量一致性差等问题,使机器人代替人工进行打磨作业。
6.双工位机器人自动化打磨抛光系统,其中双工位是指兼顾了抛光和打磨2种打磨工艺,即打磨工具砂带和砂轮集成在一个打磨装置上。
7.本发明的技术方案:一种双工位机器人自动化打磨抛光系统,其特征在于,包括带工装板的下料工作台(2)、带工装板的上料工作台(3)、工业机器人(4)、防护房(5)、双工位打磨抛光机(6)、测量装置(7)、除尘系统(8);所述工业机器人(4)是六自由度工业机器人,机器人末端执行器上配置有用于抓取待打磨产品的抓手;所述双工位打磨抛光机(6)是同时安装一个砂带机和一个砂轮机;所述带工装板的上料工作台(3)和带工装板的下料工作台(2)分别实现打磨抛光前后的工件的稳定定位便于机器人抓取;所述测量装置(7)是由机架及激光位移传感器组成,用于测量产品外形数据,并将测量数据通过算法补偿到工业机器人(4)打磨程序中,自动纠偏打磨轨迹;所述防护房(5)是由钣金焊接而成,设置维修人员出入安全门,出入安全门设置关闭监测,门开时设备无法启动自动打磨模式,带工装板的上料工作台3和带工装板的下料工作台2布置于防护房5内,并设置透明窗口,便于观察防护房5内机器人(4)及双工位打磨抛光机(6)的运作情况,顶部留有除尘系统安装口,用于安装除尘系统(8)抽风管;所述除尘系统(8)是对防护房(5)内打磨产生的金属颗粒进行去除。
8.本发明的技术效果:
9.采用双工位打磨抛光机,兼顾了打磨和抛光两种打磨工艺,通过更换砂轮和砂带可实现不同产品的打磨抛光,拓展了打磨抛光范围;实现了机器人代替工人进行自动化打磨,相对于人工打磨方式,工人的劳动强度大大减轻,企业安全系数大大提高;封闭式防护房和除尘系统组合配置,减少噪音、粉尘及火花对操作人员的危害,改善了作业环境。
附图说明
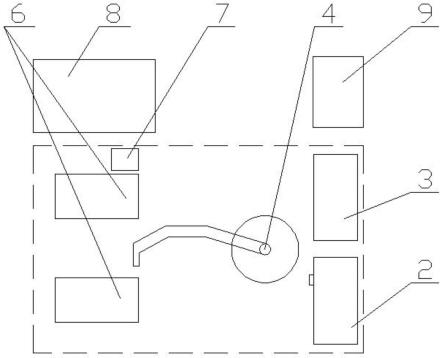
10.图1双工位机器人自动化打磨抛光系统主视图
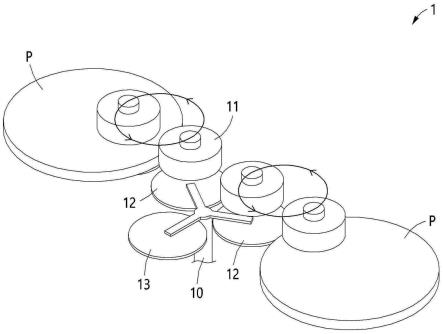
11.图2双工位机器人自动化打磨抛光系统俯视图
具体实施方式
12.本发明关键是针对高锰钢产品提出了一种双工位机器人自动化打磨方案,另外,本发明采用的是两台双工位打磨抛光机,兼顾了打磨和抛光两种打磨工艺,同时安装不同的砂轮和砂带可以实现多种产品的打磨。
13.本发明的一种高锰钢履带板机器人自动化打磨抛光系统,包括集成底座1、带工装板的下料工作台2、带工装板的上料工作台3、工业机器人4、防护房5、双工位打磨抛光机6、测量装置7、除尘系统8及控制系统9。
14.所述工业机器人4是六自由度工业机器人,机器人末端执行器上配置有用于抓取待打磨产品的抓手。
15.所述双工位打磨抛光机6是可以同时安装一个砂带机和一个砂轮机,可有效提高打磨扩展性,同时兼容不同打磨工艺。
16.双工位打磨抛光机由接触轮、涨紧轮、砂带、电机、砂轮和支撑框架组成,接触轮、涨紧轮、砂带组成了砂带机,电机既可以驱动砂带机,也可以驱动砂轮,支撑框架上可以同时安装一个砂带机和一个砂轮,兼顾了打磨和抛光两种工艺。
17.所述带工装板的上料工作台3和带工装板的下料工作台2都是由工作台架和定位工装组成,工作台架是由方管焊接而成,定位工装采用仿型定位,分别实现打磨抛光前后的工件的稳定定位便于机器人抓取。
18.所述测量装置7是由机架及激光位移传感器组成,用于测量产品外形数据,并将测量数据通过算法补偿到机器人打磨程序中,自动纠偏打磨轨迹,确保产品打磨质量。
19.所述防护房5是由钣金焊接而成,设置维修人员出入安全门,出入安全门设置关闭监测,门开时设备无法启动自动打磨模式,带工装板的上料工作台3和带工装板的下料工作台2布置于防护房5内,并设置透明窗口,便于观察防护房5内机器人4及双工位打磨抛光机6的运作情况,顶部留有除尘系统安装口,用于安装除尘系统8抽风管。
20.所述除尘系统8是对防护房5内打磨产生的金属颗粒进行去除。
21.高锰钢履带板机器人自动化打磨抛光系统,还包括集成底座1,所述工业机器人4、双工位打磨抛光机6、上料工作台3、下料工作台2、测量装置7均设置在集成底座1上,且位于所述防护房5内。
22.高锰钢履带板机器人自动化打磨抛光系统,还包括用于控制所述工业机器人、双工位打磨抛光机的控制系统9,为其提供动力。
23.总包括:成底座1、带工装板的下料工作台2、带工装板的上料工作台3、工业机器人
4、防护房5、双工位打磨抛光机6、测量装置7、除尘系统8及控制系统9。
24.双工位机器人自动化打磨抛光系统工作流程:
25.待打磨的高锰钢履带板置于所述上料工作台3的工装板上,所述工业机器人4抓取履带板至所述测量装置7进行毛刺高度测量,然后在所述双工位打磨抛光机6上打磨,打磨完成后,将打磨好的履带板放置到所述下料工作台2工装板上。
技术特征:
1.一种双工位机器人自动化打磨抛光系统,其特征在于,包括带工装板的下料工作台(2)、带工装板的上料工作台(3)、工业机器人(4)、防护房(5)、双工位打磨抛光机(6)、测量装置(7)、除尘系统(8);所述工业机器人(4)是六自由度工业机器人,机器人末端执行器上配置有用于抓取待打磨产品的抓手;所述双工位打磨抛光机(6)是同时安装一个砂带机和一个砂轮机;所述带工装板的上料工作台(3)和带工装板的下料工作台(2)分别实现打磨抛光前后的工件的稳定定位便于机器人抓取;所述测量装置(7)是由机架及激光位移传感器组成,用于测量产品外形数据,并将测量数据通过算法补偿到工业机器人(4)打磨程序中,自动纠偏打磨轨迹;所述防护房(5)是由钣金焊接而成,设置维修人员出入安全门,出入安全门设置关闭监测,门开时设备无法启动自动打磨模式,带工装板的上料工作台3和带工装板的下料工作台2布置于防护房5内,并设置透明窗口,便于观察防护房5内机器人(4)及双工位打磨抛光机(6)的运作情况,顶部留有除尘系统安装口,用于安装除尘系统(8)抽风管;所述除尘系统(8)是对防护房(5)内打磨产生的金属颗粒进行去除。2.根据权利要求1所述的一种双工位机器人自动化打磨抛光系统,其特征在于,还包括集成底座(1),所述工业机器人(4)、双工位打磨抛光机(6)、上料工作台(3)、下料工作台(2)、测量装置(7)均设置在集成底座(1)上,且位于所述防护房(5)内。3.根据权利要求1所述的一种双工位机器人自动化打磨抛光系统,其特征在于,所述带工装板的上料工作台(3)和带工装板的下料工作台(2)都是由工作台架和定位工装组成,工作台及控制系统(9)架是由方管焊接而成,定位工装采用仿型定位。4.根据权利要求1所述的一种双工位机器人自动化打磨抛光系统,其特征在于,还包括用于控制所述工业机器人、双工位打磨抛光机的控制系统,为其提供动力。5.根据权利要求1所述的一种双工位机器人自动化打磨抛光系统,其特征在于,双工位打磨抛光机,安装一个砂带机和一个砂带机机并且砂带机砂带机采用一个电机驱动。6.根据权利要求1所述的一种双工位机器人自动化打磨抛光系统,其特征在于,工作流程:待打磨的履带板置于所述上料工作台(3)的工装板上,所述工业机器人(4)抓取履带板至所述测量装置(7)进行毛刺高度测量,然后在所述双工位打磨抛光机(6)上打磨,打磨完成后,将打磨好的履带板放置到所述下料工作台(2)工装板上。
技术总结
本发明提供一种双工位机器人自动化打磨抛光系统,为一种针对高锰钢履带板的双工位机器人自动化打磨抛光系统,有效解决铸件打磨过程中存在的安全系数低、劳动强度高、灰尘和噪声大、招工难、效率低、质量一致性差等问题,使机器人代替人工进行打磨作业。自动化打磨抛光系统,包括带工装板的下料工作台(2)、带工装板的上料工作台(3)、工业机器人(4)、防护房(5)、双工位打磨抛光机(6)、测量装置(7)、除尘系统(8);采用双工位打磨抛光机,兼顾了打磨和抛光两种打磨工艺,实现了机器人代替工人进行自动化打磨,相对于人工打磨方式,工人的劳动强度大大减轻,企业安全系数大大提高。企业安全系数大大提高。企业安全系数大大提高。
技术研发人员:赵富 郝慧慧 马涛 张磊 杨曦昊 李爽 武络 裴雨霞 王浩博 张玲郁 姜玉海
受保护的技术使用者:内蒙古第一机械集团股份有限公司
技术研发日:2022.08.10
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。