1.以下的实施例涉及一种基板研磨系统。
背景技术:
2.在半导体元件的制造中,需要包括研磨、抛光(buffing)及清洗的化学机械抛光(cmp,chemical mechanical polishing)作业。半导体元件为多层结构的形态,在基板层形成有具备扩散区域的晶体管元件。在基板层,连接金属线图形化,与形成功能性元件的晶体管元件电连接。众所周知,图形化的导电层通过诸如二氧化硅的绝缘材料而与其他的导电层绝缘。由于形成更多的金属层和与之关联的绝缘层,因此使得绝缘材料扁平的必要性增加。如果未扁平化,则由于扁平形态上的很多变动导致追加的金属层的制造实质上更困难。此外,金属线图形由绝缘材料形成,金属cmp作业去除过剩金属物。
3.为了增加cmp工艺的生产效率,有必要减少工艺间等待时间且并列地进行各工艺。例如,减少基板的移送动线,对多个基板同时进行移送及研磨的情况,可增加cmp工艺的生产效率。
4.前述的背景技术是发明人在导出本技术的公开内容的过程中拥有或掌握的,未必是在本技术之前向一般公众公开的公知技术。
技术实现要素:
5.一个实施例的目的在于,提供一种基板研磨系统,可对多个基板同时进行移送、研磨及清洗工艺。
6.一个实施例的目的在于,提供一种基板研磨系统,在基板的移送及等待过程中使得基板保持一定状态并清洗载体,从而可以提高基板的收率。
7.根据一个实施例的基板研磨系统可以包括:基板移送部,其支撑基板的下面,通过旋转运动形成圆形的移送轨道并移送基板;至少一个载体,其从基板移送部接收传递的基板并进行研磨;以及装载部,其使得安放于基板移送部的基板装载至载体或使得位于载体的基板卸载至基板移送部。
8.装载部可以包括喷射流体的第一喷嘴。
9.装载部还可以包括:旋转部,其以垂直于地面的旋转轴为中心进行旋转;装载板,其借助旋转部进行旋转并支撑基板的下面;凸出部,其连接于装载板的外侧,向上侧凸出形成。
10.在装载部通过向上侧移动而使得基板装载或卸载的过程中,凸出部的上面可以位于比载体的下面高的位置。
11.第一喷嘴可以位于装载板的上面。
12.第一喷嘴可以位于凸出部的内侧面。
13.装载部可以沿基板移送部的上侧或下侧方向上下运动。
14.基板移送部可以包括:轴,其以垂直于地面的旋转轴为中心进行旋转;以及至少一
个以上的移送臂,其支撑基板的下面,随着轴的旋转形成圆形的移送轨道并移送基板。
15.移送臂在移送轨道上的第一位置接收研磨前状态的基板的传递,然后向移送轨道上的第二位置移动从而可以将研磨前状态的基板传递至载体。
16.移送臂在第二位置从载体接收传递的研磨后状态的基板,然后向第一位置移动从而可以将研磨后状态的基板向下一个工艺传递。
17.移送臂可以设置有多个并以轴为中心以等角度隔开配置。
18.多个移送臂中的一个位于第一位置时,多个移送臂中的至少一个以上可以位于第二位置。
19.装载部可以位于第二位置。
20.还可以包括工作台部,其位于移送轨道上的一侧并支撑基板。
21.工作台部可以位于第一位置。
22.工作台部可以包括喷射流体的第二喷嘴。
23.根据一个实施例的基板研磨系统可以对多个基板同时进行移送、研磨及清洗工艺,从而可以缩短基板研磨工艺的时间。
24.根据一个实施例的基板研磨系统,在基板的移送及等待过程中使得基板保持一定状态并清洗载体,从而可以提高基板的收率。
附图说明
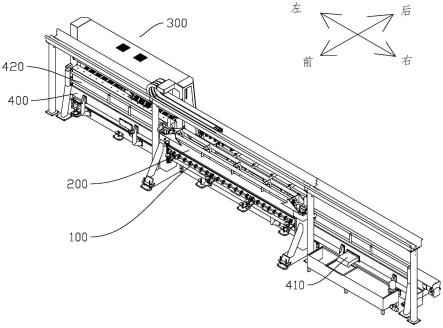
25.图1是根据一个实施例的基板研磨系统的概略图。
26.图2是从根据一个实施例的基板研磨系统的侧面观察到的概略图。
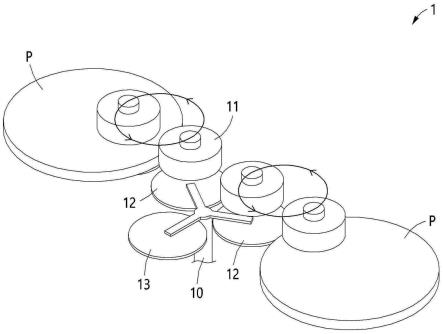
27.图3是根据一个实施例的基板研磨系统的上侧概略图。
28.图4是在图3的状态下基板移送部以等角度旋转的状态的概略图。
29.图5是在图3的状态下基板移送部以小于等角的角度旋转的状态的概略图。
30.标号说明
31.1:基板研磨系统
32.10:基板移送部
33.11:载体
34.12:装载部
35.13:工作台部
36.100:轴
37.101:移送臂
38.120:旋转部
39.121:装载板
40.122:凸出部
41.123:第一喷嘴
42.130:工作台板
43.131:第二喷嘴
44.l1:第一位置
45.l2:第二位置
具体实施方式
46.以下,参照附图对实施例进行详细说明。但是,在实施例中可施加多种改变,因此专利申请的权利范围并不受这些实施例的限制或限定。应理解为,对实施例进行的所有变更、均等物乃至代替物都包括在权利范围内。
47.实施例中使用的术语仅仅以说明为目的而使用,不应解释为用于限定的意图。如果文脉上没有明确的不同含义,那么单数的表达包括复数的表达。本说明书中,“包括”或“具有”等术语是要指定说明书上记载的特征、数字、步骤、动作、构成要素、部件或这些组合的存在,应理解为不预先排除一个或一个以上的其他特征或数字、步骤、动作、构成要素、部件或这些组合的存在或附加可能性。
48.如果没有其他的定义,包括技术或者科学术语在内,在此使用的所有术语具有与实施例所属的技术领域内具有一般知识的技术人员通常理解的含义相同的含义。诸如在一般使用的词典中定义的术语,应解释为具有与相关技术的文脉上具有的含义一致的含义,如果本技术中没有明确地定义,则不解释为理想或过于形式上的含义。
49.此外,在参照附图进行说明时,与附图标号无关地,相同的构成要素赋予相同的参照标号,并省略对此的重复的说明。在说明实施例时,判断对于相关的公知技术的具体说明可能会不必要地混淆实施例的要旨的情况,省略其详细的说明。
50.此外,在说明实施例的构成要素时,可使用第一、第二、a、b、(a)、(b)等术语。这些术语仅用于将该构成要素与其他的构成要素区别开来,相应构成要素的本质或次序或顺序等不受该术语的限定。记载某个构成要素与其他的构成要素“连接”、“结合”或“接合”的情况,应理解为,该构成要素可以与其他的构成要素直接连接或接合,但也可以在各构成要素之间“连接”、“结合”或“接合”又其他的构成要素。
51.在某一个实施例中包括的构成要素和包括共同功能的构成要素,在其他实施例中使用相同的名称并进行说明。如果没有相反的记载,在某一个实施例记载的说明也可适用于其他实施例,在重复的范围内省略具体的说明。
52.图1是根据一个实施例的基板研磨系统的概略图。图2是从根据一个实施例的基板研磨系统的侧面观察到的概略图。
53.参照图1及图2,根据一个实施例的基板研磨系统1可以用于对基板的表面进行研磨的化学机械平坦化工艺(cmp,chemical mechanical planarization)。通过基板研磨系统1进行研磨的基板可以是半导体装置制造用硅晶圆(silicon wafer)。但是,基板的种类不限定于此。例如,基板可包括lcd(liquid crystal display,液晶显示器)、pdp(plasma display device,等离子体显示器)、fpd(flat panel display,平板显示器)用玻璃。图中示出了基板为圆形,但这仅仅是为了说明的便利的例示,基板的形状不限定于此。
54.基板研磨系统1可以包括基板移送部10、载体11、装载部12及工作台部13。
55.基板移送部10可以支撑基板w的下面。具体地,基板移送部10通过搬运机器人获得研磨前状态的基板w的传递后可以将基板w安放于上面。此外,基板移送部10从载体11获得研磨后状态的基板w的传递后可以将基板w安放于上面。例如,基板移送部10可以通过旋转运动形成圆形的移送轨道并对安放的基板w进行移送。基板移送部10可以同时安放多个基板w,以便可以同时移动研磨前状态的基板w和研磨后状态的基板w。
56.基板移送部10可以包括轴100及移送臂101。
57.轴100可以以垂直于地面的旋转轴为中心进行旋转。轴100可以单向或双向旋转。
58.移送臂101支撑基板w的下面,随着轴100的旋转形成圆形的移送轨道并可以移送基板w。例如,移送臂101以轴100为中心沿放射状方向形成,在和轴100连接的状态下沿着轴100的旋转方向旋转,从而可以形成圆形的移送轨道。换句话说,移送臂101的一侧可以和轴100连接,另一侧可以支撑基板w。
59.图3是根据一个实施例的基板研磨系统1的上侧概略图,图4是在图3的状态下基板移送部10以等角度旋转的状态的概略图,图5是在图3的状态下基板移送部10以小于等角的角度旋转的状态的概略图。
60.参照图3至图5,移送臂101可以设置多个并以轴100为中心以等角度隔开配置。多个移送臂101中的一部分可以获得研磨前状态的基板w的传递,多个移送臂101中的一部分可以获得研磨后状态的基板w的传递。多个移送臂101中的一个位于第一位置l1时,多个移送臂101中的至少一个以上可以位于第二位置l2。例如,移送臂101在移送轨道上的第一位置l1获得研磨前状态的基板w的传递,然后向移送轨道上的第二位置l2移动从而可以将研磨前状态的基板w传递至载体11。载体11从移送臂101接收传递的研磨前状态的基板w后向后述的研磨垫p移动从而可以进行基板w的研磨工艺。此外,载体11进行研磨工艺后向基板移送部10移动,移送臂101在第二位置l2从载体11接收传递的研磨后状态的基板w,然后向第一位置l1移动从而可以将研磨后状态的基板w向下一个工艺传递。借助基板移送部10移动至第一位置l1的研磨后状态的基板w可以通过搬运机器人再次送往后方。研磨后状态的基板w可以借助搬运机器人被送至诸如清洗工艺的下一个工艺。
61.在上面的过程中,研磨工艺可以包括多个研磨工艺,第二位置l2可以包括多个位置。例如,从第一位置l1向多个第二位置l2中的一个位置移动的基板w在接收第一研磨工艺后可以重新返回至基板移送部10。接受了第一研磨工艺并返回至基板移送部10的基板w可以借助基板移送部10向多个第二位置l2中的另一个位置移动并接受第二研磨工艺。接受了第二研磨工艺的基板w被传递至基板移送部10并可以返回至第一位置l1。如此,根据研磨工艺的数量可以调节移送臂101的个数和第二位置l2的个数。
62.载体11从基板移送部10获得传递的基板w后可以进行研磨。载体11抓紧基板w并通过旋转运动可以对基板w进行研磨。载体11位于基板w的上侧,可以以对基板w的上侧及侧部进行包围的形态抓紧基板w。例如,载体11可以通过膜(未示出)以吸附式抓紧基板w。抓紧及吸附基板w的载体11向研磨垫p移动,使得研磨垫p和基板w的研磨面接触摩擦,从而可以进行研磨工艺。载体11为了研磨基板w而可以旋转及/或并进移动(振荡)。此外,载体11为了装载/卸载基板w或研磨基板w而可以沿和地面垂直的方向上下移动。
63.装载部12可以将安放于基板移送部10的基板w装载至载体11或将位于载体11的基板w卸载至基板移送部10。装载部12可以沿基板移送部10的上侧或下侧方向上下运动。例如,装载部12可以在支撑安放于基板移送部10的基板w的状态下向上侧移动,以便使得载体11可以装载基板w。此外,装载部12可以在获得载体11抓紧的基板w的传递后向下侧移动,以便使得载体11可以卸载基板w。
64.装载部12可以位于第二位置l2。装载部12可以针对多个第二位置l2设置多个。
65.装载部12可以包括旋转部120、装载板121、凸出部122及第一喷嘴123。
66.旋转部120可以以垂直于地面的旋转轴为中心进行旋转。装载板121可以与旋转部
120连接并借助旋转部120进行旋转。装载板121可以支撑基板w的下面。换句话说,旋转部120及装载板121向上侧或下侧方向移动,安放于装载板121的上面的基板w可以根据装载板121的移动方向装载至载体11或卸载至基板移送部10。
67.凸出部122可以连接于装载板121的外侧并向上侧凸出形成。例如,凸出部122可以包括空心的支柱形状。具体地,装载板121包括圆形板形状的情况,凸出部122可以包括空心的圆筒形状。在从上侧观察的基准上,凸出部122的半径可以比载体11的半径大。此外,在装载部12通过向上侧移动而装载或卸载基板w的过程中,凸出部122的上面可以位于比载体11的下面高的位置。
68.结果是,根据上述的凸出部122的结构,凸出部122在装载部12装载或卸载基板w的过程中,可以防止基板w向外侧脱离的现象。此外,凸出部122以包围载体11的外侧的形式设置并在内侧面设置有后述的第一喷嘴123,从而利用喷嘴123可以更加有效地清洗载体11。
69.第一喷嘴123可以喷射流体。例如,流体可以包括清洗液。另外,第一喷嘴123可以位于装载板121的上面。此外,第一喷嘴123可以位于凸出部122的内侧面。
70.装载部12通过喷射清洗液可以去除存在于载体11的表面的异物。具体地,通过研磨剂研磨基板w的过程中,研磨剂可以附着及固着于载体11的膜。附着及固着于膜的研磨剂有引起化学反应的危险,从而可能造成基板w缺陷。结果,附着及固着于膜的研磨剂可能使得基板w收率降低。此时,研磨剂可以包括研磨液。基板w借助基板移送部10从第一研磨工艺向第二研磨工艺移动的过程中,装载部12可以去除附着及固着于载体11表面的研磨剂,从而装载部12不仅可以缩短基板w研磨工艺的时间,还可以增加基板w的收率。
71.装载部12在载体11未抓紧基板w的状态下可以清洗载体11,在载体11抓紧基板w的状态下也可以清洗载体11。以从侧面观察的基准,装载部12和载体11可以位于同一条线上。
72.工作台部13位于移送轨道上的一侧,可以支撑基板w。例如,工作台部13位于第一位置l1,可以协助基板移送部10从搬运机器人获得基板w的传递的过程或基板移送部10向搬运机器人传递基板w的过程。此外,在基板w等待的过程中支撑基板w的下面,从而可以协助基板w使其稳定地保持等待状态。最后,工作台部13可以发挥使得流体向机体的表面喷射,从而可以使得机体保持一定状态的功能。工作台部13在位于基板移送部10的下侧的状态下可以向上侧或下侧方向移动。
73.工作台部13可以包括工作台板130及第二喷嘴131。
74.工作台板130可以支撑基板w的下面。工作台板130通过向下侧或上侧移动可以支撑或不支撑基板w。第二喷嘴131可以位于工作台板130的上面并喷射流体。具体地,第二喷嘴131通过向等待或移送中的基板w的上面喷射流体从而可以使得基板w保持湿润状态。根据所述的功能,工作台部13稳定地支撑基板w的同时,保持基板w的湿润状态,从而可以防止基板w因干燥而磨损或受损的现象。
75.如上虽然通过限定的附图说明了实施例,但对于在该技术领域内具有一般的知识的人员而言,以所述内容为基础可适用各种技术性修正及变形。例如,通过与说明的方法不同的顺序执行说明的技术,及/或以与说明的方法不同的形态结合或组合说明的系统、结构、装置、电路等构成要素,或通过其他的构成要素或均等物代替或置换也可实现适当的结果。
76.因此,其他的实现、其他的实施例及与权利要求书均等的事项也属于权利要求书
的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。