技术特征:
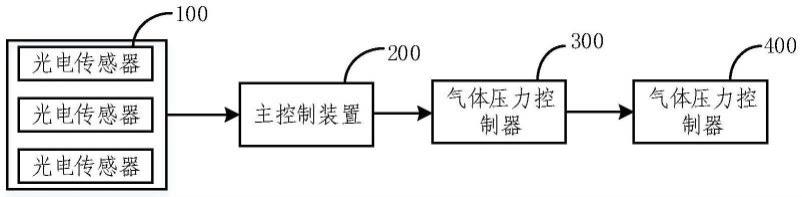
1.一种真空吸附机械手吸附力控制设备,其特征在于,包括:多个光电传感器;主控装置,与多个所述光电传感器电连接,所述主控装置用于获取晶圆被吸附或释放时所述光电传感器的光通量的变化值;将所述变化值利用正态分析模型进行分析,并将所述变化值与第一预设值进行比对,得出所述变化值与所述第一预设值的偏差值;将所述偏差值经过pid算法进行计算,得出控制阀调节值;气体压力控制器,与所述主控装置电连接;压力调节阀,与所述气体压力控制器电连接,所述压力调节阀与对应的吸附机构通过管路连通;所述气体压力控制器用于根据所述主控装置输出的所述控制阀调节值对所述压力调节阀进行压力调节,以对所述吸附机构的吸附力进行控制。2.根据权利要求1所述的真空吸附机械手吸附力控制设备,其特征在于,所述主控装置还用于将所述偏差值与第二预设值进行比对,在确定所述偏差值大于所述第二预设值的情况下,输出报警信号。3.根据权利要求1所述的真空吸附机械手吸附力控制设备,其特征在于,所述主控装置为控制器,所述吸附机构为吸盘。4.根据权利要求1所述的真空吸附机械手吸附力控制设备,其特征在于,所述真空吸附机械手吸附力控制设备包括三个所述光电传感器,三个所述光电传感器一一对应地布置于正三角形的三个顶点。5.一种真空吸附机械手吸附力控制方法,所述控制方法基于权利要求1至4中任意一项所述的真空吸附机械手吸附力控制设备;其特征在于,包括以下步骤:步骤s100,获取晶圆被吸附或释放时光电传感器的光通量的变化值;步骤s110,将所述变化值利用正态分析模型进行分析,并将所述变化值与第一预设值进行比对,得出所述变化值与所述第一预设值的偏差值;步骤s120,将所述偏差值经过pid算法进行计算,得出控制阀调节值;步骤s130,气体压力控制器根据所述控制阀调节值对压力调节阀进行压力调节,以对吸附机构的吸附力进行控制。6.根据权利要求5所述的真空吸附机械手吸附力控制方法,其特征在于,在执行所述步骤s110的同时还执行以下步骤:将所述偏差值与第二预设值进行比对,在确定所述偏差值大于所述第二预设值的情况下,输出报警信号。7.根据权利要求5所述的真空吸附机械手吸附力控制方法,其特征在于,在执行所述步骤s130之后还执行以下步骤:重复执行所述步骤s100至所述步骤s130。8.根据权利要求5至7中任意一项所述的真空吸附机械手吸附力控制方法,其特征在于,在执行所述步骤s100之前还执行以下步骤:确定是否进行测试运行,若是则执所述测试运行;否则执行所述步骤s100。9.根据权利要求8所述的真空吸附机械手吸附力控制方法,其特征在于,所述测试运行包括以下步骤:步骤s200,获取晶圆被吸附或释放时光电传感器的光通量的变化值;
步骤s210,将所述变化值利用正态分析模型进行分析,并将所述变化值与第一预设值进行比对,得出所述变化值与所述第一预设值的偏差值;步骤s220,将所述偏差值经过pid算法进行计算,得出控制阀调节值;步骤s230,气体压力控制器根据所述控制阀调节值对压力调节阀进行压力调节,以对吸附机构的吸附力进行控制。步骤s240,将所述步骤s200至所述步骤s230重复执行n次。10.根据权利要求9所述的真空吸附机械手吸附力控制方法,其特征在于,n为大于2的正整数。
技术总结
本发明提供一种真空吸附机械手吸附力控制设备及方法,涉及半导体制造技术领域,控制设备包括多个光电传感器、主控装置、气体压力控制器和压力调节阀,主控装置用于获取晶圆被吸附或释放时光电传感器的光通量的变化值;将变化值利用正态分析模型进行分析,并将变化值与第一预设值进行比对,得出变化值与第一预设值的偏差值。通过获取晶圆被吸附或释放时光电传感器的光通量的变化值计算得到控制阀调节值,通过气体压力控制器根据控制阀调节值对压力调节阀进行压力调节,以对吸附机构的吸附力进行控制,从而实现自动调节吸附机构的吸附力。由于可以根据不同规格的晶圆自动调节吸附力的大小,从而实现对吸附力的精确控制。从而实现对吸附力的精确控制。从而实现对吸附力的精确控制。
技术研发人员:王晓尉
受保护的技术使用者:北京京仪自动化装备技术股份有限公司
技术研发日:2022.07.29
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。