1.本发明涉及工业机器人技术领域,特别涉及一种六自由度关节机器人。
背景技术:
2.目前,工业机器人已经广泛应用于汽车零部件、机械加工、电子电气、食品、橡胶及塑料工业、木材与家具制造业等领域中。
3.在工业生产中,采用工业机器人具有如下优点:改善劳动条件,提高生产效率;更强与可控的生产能力,缩短产品更新换代的周期;提升零件的处理能力与产品质量;消除枯燥乏味的工作,节约劳动力;提供更加安全的工作环境,减轻工人的劳动强度,减少劳动风险。随着国内社会劳动力的过剩程度降低、单个工人成本增加、对产品质量更严格的要求、政府对装备制造业的重视等变化改善了机器人的使用环境,工业机器人及技术在中国已逐渐得到了政府和企业的重视。利用机器人技术提升我国工业生产水平、从制造业大国向强国转变,提高人民生活水平已成为全社会的共识。
4.目前,六自由度机器人的减速机主要采用普通减速机,导致机器人各轴的传动布局方式复杂,不仅影响各臂的结构强度,而且加剧传动齿轮齿部的磨损程度,不利于更好的啮合;
5.目前已公开的两种方案在四轴选型计算时,均需要考虑减速机承受弯矩在参数要求范围内。
6.另外,安装四轴电机和减速机,结构复杂,加工难度较大;使机器人三轴本体至负载的结构重心靠近末端,该部分结构的转动惯量与质量m和质心到三轴回转轴线的距离r的平方有关,因此三轴启停所需转矩较大,电机负载率较高,转速无法进一步提升。
技术实现要素:
7.本发明的目的在于解决背景技术中传统关节机器人可承受弯矩受限、电机负载率较高以及转速无法进一步提升的技术问题,从而提供一种六自由度关节机器人。
8.为至少解决上述问题之一,本发明提供一种六自由度关节机器人,包括底座、第一转动关节、第二转动关节、大臂组件、肘部组件和小臂组件,
9.所述第一转动关节竖向连接在所述底座的上表面,所述第二转动关节横向连接在所述第一转动关节的一侧,且所述第一转动关节适于相对所述底座作水平圆周旋转运动,所述第二转动关节适于相对所述第一转动关节作竖直方向运动;
10.所述大臂组件的一端转动连接在所述第二转动关节上,以适于在所述第二转动关节的驱动下作竖直方向运动,所述大臂组件的另一端侧部与所述肘部组件转动连接,所述肘部组件的另一侧与所述小臂组件连接。
11.可选地,所述的第一转动关节包括转台座、第一转动结构和第一驱动组件,
12.所述转台座包括位于所述底座正上方的转台底座、竖直连接在所述转台底座上表面一侧的第二转动安装座和连接在所述第二转动安装座外侧的转台走线槽;
13.所述第一转动结构包括竖直设置在所述转台底座内的底座套筒、水平套接在所述底座套筒顶部的第一从动斜齿轮以及水平套设连接在所述底座套筒底部的交叉滚子轴承和骨架油封,所述骨架油封位于所述交叉滚子轴承的底部端面;
14.所述第一驱动组件包括第一伺服电机、第一行星减速机和第一主动斜齿轮,所述第一行星减速机的输入轴固定连接在所述第一伺服电机的输出轴上,所述第一主动斜齿轮固定连接在所述第一行星减速机的输出轴上;
15.所述第一主动斜齿轮与所述第一从动斜齿轮啮合连接在所述转台底座内,以适于所述第一驱动组件带动所述第一转动结构作水平旋转运动;
16.所述第一伺服电机和所述第一行星减速机竖直连接在所述转台底座上,所述第一主动斜齿轮位于所述转台底座内,且所述转台底座的下端面固定连接在所述底座套筒的下端面,以适于所述转台座随所述第一转动结构作水平方向旋转运动。
17.可选地,所述转台底座包括开设在转台底座本体上的第一驱动安装槽和第一转动安装槽,所述第一转动安装槽位于所述转台底座本体的中心位置,所述第一驱动安装槽位于所述第一转动安装槽的一侧附近;
18.所述第一转动结构的顶部适于插设在所述第一转动安装槽内,所述第一驱动组件的底部适于插设在所述第一驱动安装槽内。
19.可选地,所述第二转动关节包括第二伺服电机和第二行星减速机,所述第二行星减速机远离所述第二伺服电机的一侧固定连接在所述第二转动安装座内,所述第二行星减速机的输入轴与所述第二伺服电机连接,所述第二行星减速机的输出轴与所述大臂组件连接,以适于所述第二转动关节带动所述大臂组件转动。
20.可选地,所述大臂组件包含大臂、大臂下连接结构和大臂上连接结构,所述大臂下连接结构设置在所述大臂靠近所述第二行星减速机的一侧,以适于与所述第二行星减速机的输出轴固定连接,所述大臂上连接结构设置在所述大臂的另一端的同侧,以适于与所述肘部组件固定连接;
21.所述大臂包括大臂本体、一体连接在所述大臂本体下端的大臂下安装座和一体连接在所述大臂本体上端的大臂上安装座,所述大臂下安装座适于与所述第二行星减速机的端面固定连接,所述大臂上安装座适于与所述肘部组件固定连接。
22.所述大臂下连接结构包括大臂下端盖、第一过线轴承座和深沟球轴承,所述第一过线轴承座和所述深沟球轴承适于套设在所述转台走线槽内,且所述大臂下端盖适于盖设在所述大臂下安装座上;
23.所述大臂上连接结构包括大臂上端盖和调整垫板,所述调整垫板安装在所述肘部组件上,所述大臂上端盖适于盖设在所述大臂上安装座上。
24.可选地,所述肘部组件包括第一驱动部件、第二驱动部件、第一驱动外壳和第二驱动外壳,所述第一驱动部件和所述第二驱动部件呈水平垂直交叉设置在所述第一驱动外壳和所述第二驱动外壳内,所述第一驱动外壳和所述第二驱动外壳组合连接构成所述第一驱动部件和所述第二驱动部件的外壳;
25.所述第一驱动部件伸出所述第一驱动外壳的端部与所述大臂组件的大臂上连接结构固定连接;
26.所述第二驱动部件伸出所述第二驱动外壳的端部适于与外部结构连接。
27.可选地,所述第一驱动部件包括三轴伺服电机、三轴伺服电机座、三轴驱动带轮、第一同步带和三轴减速机带轮组件,所述三轴伺服电机的输出轴与所述三轴驱动带轮连接,所述三轴伺服电机座的一侧与所述第一驱动外壳的内表面固定连接,另一侧与所述三轴伺服电机的端面固定连接,所述第一同步带的一端包绕在所述三轴驱动带轮上,另一端包绕在所述三轴减速机带轮组件上;
28.所述三轴减速机带轮组件包括三轴从动带轮、三轴过线套筒、外圈隔套、轴承和三轴轴承端盖,所述三轴从动带轮套设安装在所述三轴过线套筒的端部,所述外圈隔套和所述轴承依次安装在所述三轴过线套筒上,且所述三轴轴承端盖连接在所述三轴过线套筒的端部。
29.可选地,所述第二驱动部件包括四轴伺服电机、四轴伺服电机座、四轴驱动带轮、第二同步带和四轴减速机带轮组件,所述四轴驱动带轮固定连接在所述四轴伺服电机的输出轴上,所述四轴伺服电机座套设在所述四轴伺服电机的输出轴上,其一侧与所述四轴伺服电机的端面固定连接,另一端与所述第二驱动外壳的内表面固定连接,所述第二同步带的一端包绕在所述四轴驱动带轮上,另一端包绕在所述四轴减速机带轮组件上;
30.所述四轴减速机带轮组件包括四轴从动带轮、四轴过线套筒、深沟球轴承和四轴轴承压盖,所述四轴从动带轮套设安装在所述四轴过线套筒的端部,所述深沟球轴承安装在所述四轴过线套筒上,且所述四轴轴承压盖连接在所述四轴过线套筒的端部。
31.可选地,所述小臂组件包括小臂、小臂下连接结构、小臂上连接结构、五轴驱动组件和六轴驱动组件,所述小臂下连接结构的一端连接在所述小臂的底部,另一端固定连接在所述四轴减速机带轮组件上;
32.所述小臂上连接结构包括安装在所述小臂顶端两侧的第一侧传动结构和第二侧传动结构,所述五轴驱动组件和所述六轴驱动组件分别平行反向安装在所述小臂的内部,且所述五轴驱动组件适于驱动所述第一侧传动结构运动,所述六轴驱动组件适于驱动所述第二侧传动结构运动。
33.可选地,所述五轴驱动组件包括五轴伺服电机、五轴驱动轮和五轴同步带,所述五轴驱动轮连接在所述五轴伺服电机的输出轴上,所述五轴同步带的一端包绕在所述五轴同步带上;
34.所述第一侧传动结构包括五轴从动带轮、五轴减速机固定座、五轴谐波减速机和五轴同步带轮轴,所述五轴谐波减速机的输入轴与所述五轴从动带轮连接,所述五轴减速机固定座套设在所述五轴从动带轮与所述五轴谐波减速机之间,且所述五轴减速机固定座连接在所述小臂的内表面上,所述五轴谐波减速机的输出轴与所述五轴同步带轮轴连接;
35.所述第二侧传动结构包括六轴从动带轮、六轴传动轴外座、六轴传动轴承、六轴传动轴内座、六轴传动轴、第一伞齿轮和谐波减速部件,所述六轴传动轴上从远离所述第一侧传动结构的一侧依次设有所述六轴从动带轮、所述六轴传动轴外座、所述六轴传动轴承、所述六轴传动轴内座和所述第一伞齿轮,所述谐波减速部件安装在所述第一侧传动结构和所述第二侧传动结构之间的上方;
36.所述谐波减速部件包括从下至上依次安装有第二伞齿轮、轴承压紧环、伞齿轮轴连接器、六轴谐波减速机和输出法兰,所述谐波减速部件靠近所述第一伞齿轮的一端安装有第二伞齿轮,所述第二伞齿轮与所述第一伞齿轮啮合连接。
37.本发明与现有技术相比,至少具有以下有益效果:
38.本发明通过设计由底座、第一转动关节、第二转动关节、大臂组件、肘部组件和小臂组件组合而成的关节机器人,第一转动关节、第二转动关节、大臂组件、肘部组件和小臂组件的电机与减速机相互独立,四轴减速机与五轴本体直接连接,带动五六轴与负载转动,三四轴采用分体式结构,小臂和五六轴固定,四轴减速机输出端与小臂连接,带动小臂至末端负载结构旋转,该结构弯矩直接作用在四轴减速机上,降低三轴转速、减小末端负载,保证四轴减速机承受弯矩在参数要求范围内,降低了电机负载率,并且转速得到进一步提升。
39.本发明采用行星减速机和谐波减速机的结合,小臂电机安装在小臂内部,并与谐波减速器通过键连接在一起,谐波减速器的柔轮通过螺栓与小臂连接在一起,谐波减速器的刚轮通过螺栓与回转腕部连接在一起弯矩扭矩由交叉滚子轴承承受,保证了各臂的结构强度,同样也节省占用空间。
附图说明
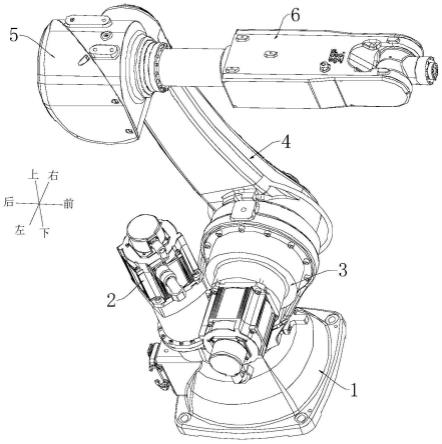
40.图1为本发明实施例中六自由度关节机器人的结构示意图;
41.图2为本发明实施例中六自由度关节机器人中底座的结构示意图;
42.图3为本发明实施例中第一转动关节与第二转动关节的安装结构示意图;
43.图4为本发明实施例中第一转动关节安装在底座上的结构示意图;
44.图5为本发明实施例中第一转动结构的结构示意图;
45.图6为本发明实施例中第一从动斜齿轮的结构示意图;
46.图7为本发明实施例中第一驱动组件的结构示意图;
47.图8为本发明实施例中第二转动关节安装在转台座的结构示意图;
48.图9为本发明实施例中转台座的结构示意图;
49.图10为本发明实施例中大臂组件的结构示意图;
50.图11为本发明实施例中肘部组件的结构示意图;
51.图12为本发明实施例中肘部组件的分解结构示意图;
52.图13为本发明实施例中第一驱动部件的结构示意图;
53.图14为本发明实施例中第二驱动部件的结构示意图;
54.图15为本发明实施例中小臂组件的结构示意图;
55.图16为本发明实施例中小臂组件的分解结构示意图;
56.图17为本发明实施例中小臂组件的内部结构示意图;
57.图18为本发明实施例中第一侧传动结构的分解结构示意图;
58.图19为本发明实施例中谐波减速部件安装在五轴轴承座中的结构示意图;
59.图20为本发明实施例中谐波减速部件安装在五轴轴承座中的分解结构示意图。
60.附图标记说明:
61.1-底座;
62.2-第一转动关节;
63.21-转台座;211-转台底座;2111-第一驱动安装槽;2112-第一转动安装槽;212-第二转动安装座;213-转台走线槽;
64.22-第一转动结构;
65.221-底座套筒;222-第一从动斜齿轮;2221-齿轮本体;2222-内台阶;2223-第一连接孔;223-交叉滚子轴承;224-骨架油封;
66.23-第一驱动组件;
67.231-第一伺服电机;232-第一行星减速机;233-第一主动斜齿轮;
68.3-第二转动关节;
69.31-第二伺服电机;32-第二行星减速机;
70.4-大臂组件;
71.41-大臂;411-大臂本体;412-大臂下安装座;413-大臂上安装座;42-大臂下连接结构;421-大臂下端盖;422-第一过线轴承座;423-深沟球轴承;
72.43-大臂上连接结构;431-大臂上端盖;432-调整垫板;
73.5-肘部组件;
74.51-第一驱动部件;511-三轴伺服电机;512-三轴伺服电机座;513-三轴驱动带轮;514-第一同步带;515-三轴减速机带轮组件;5151-三轴从动带轮;5152-三轴过线套筒;5153-外圈隔套;5154-轴承;5155-三轴轴承端盖;
75.52-第二驱动部件;521-四轴伺服电机;522-四轴伺服电机座;523-四轴驱动带轮;524-第二同步带;525-四轴减速机带轮组件;5251-四轴从动带轮;5252-四轴过线套筒;5253-深沟球轴承;5254-四轴轴承压盖;
76.53-第一驱动外壳;54-第二驱动外壳;
77.6-小臂组件;
78.61-小臂;611-小臂结构件;612-小臂第一外壳;613-小臂第二外壳;614-五轴轴承座;
79.62-小臂下连接结构;621-套筒;622-转接法兰;623-护线套;
80.63-小臂上连接结构;
81.631-第一侧传动结构;
82.6311-五轴从动带轮;6312-五轴减速机固定座;6313-五轴谐波减速机;6314-五轴同步带轮轴;
83.632-第二侧传动结构;
84.6321-六轴从动带轮;6322-六轴传动轴外座;6323-六轴传动轴承;6324-六轴传动轴内座;6325-六轴传动轴;6326-第一伞齿轮;6327-谐波减速部件;63271-第二伞齿轮;63272-轴承压紧环;63273-伞齿轮轴连接器;63274-六轴谐波减速机;63275-输出法兰;
85.64-五轴驱动组件;
86.641-五轴伺服电机;642-五轴驱动轮;643-五轴同步带;
87.65-六轴驱动组件;
88.651-六轴伺服电机;652-六轴驱动轮;653-六轴同步带;
具体实施方式
89.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
90.在本发明的描述中,需要说明的是,术语“第一”、“第二”、“第三”、等仅用于描述目的,而不能理解为指示或暗示相对重要性。
91.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,还可以是两个元件内部的连通,可以是无线连接,也可以是有线连接。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
92.请参阅图1-20所示,本发明实施例中提供了一种六自由度关节机器人,该六自由度关节机器人包括底座1、第一转动关节2、第二转动关节3、大臂组件4、肘部组件5和小臂组件6,
93.其中,第一转动关节2竖向连接在底座1的上表面,第二转动关节3横向连接在第一转动关节2的一侧,且第一转动关节2适于相对底座1作水平圆周旋转运动,第二转动关节3适于相对第一转动关节2作竖直方向运动;
94.大臂组件4的一端转动连接在第二转动关节3上,以适于在第二转动关节3的驱动下作竖直方向运动,大臂组件4的另一端侧部与肘部组件5转动连接,肘部组件5的另一侧与小臂组件6连接。
95.由此,通过机器人各轴的布局方式,在保证大臂组件4和小臂组件6的结构强度下,通过第一转动关节2、第二转动关节3、大臂组件4、肘部组件5和小臂组件6的轴电机与减速机布局,采用三四轴分体式结构,小臂组件6和五六轴固定,四轴减速机输出端与小臂连接,带动小臂至末端负载结构旋转,机器人的六自由度关节可以在确定的运动轨迹上有效控制关节的运动,并实现机器人可控虚约束,另外该结构弯矩直接作用在四轴减速机上,采取降低三轴转速、减小末端负载或增大减速机型号等措施,以保证四轴减速机承受弯矩在参数要求范围内,并带动五六轴与负载转动,减速机启停所需转矩减小,降低电机负载,并进一步提升转速。
96.具体地,请参考图3、4所示,在本发明的实施例当中,第一转动关节2包括转台座21、第一转动结构22和第一驱动组件23,其中:
97.请参阅图8所示,转台座21包括位于底座1正上方的转台底座211、竖直连接在转台底座211上表面一侧的第二转动安装座212和连接在第二转动安装座212外侧的转台走线槽213。转台座21可相对底座1在xy平面内运动,以满足机械臂的转动需要。
98.请参阅图5所示,第一转动结构22包括竖直设置在转台底座211内的底座套筒221、水平套接在底座套筒221顶部的第一从动斜齿轮222以及水平套设连接在底座套筒221底部的交叉滚子轴承223和骨架油封224,骨架油封224位于交叉滚子轴承223的底部端面。
99.由此,第一转动结构22用于带动转台座21在水平面内运动,以驱动转台座21上的机械臂运动。
100.请参阅图4所示,第一驱动组件23包括第一伺服电机231、第一行星减速机232和第一主动斜齿轮233,第一行星减速机232的输入轴固定连接在第一伺服电机231的输出轴上,第一主动斜齿轮233固定连接在第一行星减速机232的输出轴上。
101.由此,第一驱动组件23驱动第一转动结构22运动,从而实现转台座21的运动。
102.第一主动斜齿轮233与第一从动斜齿轮222啮合连接在转台底座211内,以适于第
一驱动组件23带动第一转动结构22作水平旋转运动。
103.第一伺服电机231和第一行星减速机232竖直连接在转台底座211上,第一主动斜齿轮233位于转台底座211内,且转台底座211的下端面固定连接在底座套筒221的下端面,以适于转台座21随第一转动结构22作水平方向旋转运动。
104.具体地,请参考图9所示,在本发明的实施例当中,转台底座211包括开设在转台底座本体上的第一驱动安装槽2111和第一转动安装槽2112,第一转动安装槽2112位于转台底座本体的中心位置,第一驱动安装槽2111位于第一转动安装槽2112的一侧附近。
105.第一转动结构22的顶部适于插设在第一转动安装槽2112内,第一驱动组件23的底部适于插设在第一驱动安装槽2111内。
106.由此,第一驱动组件23、第二转动关节3适于安装在转台底座211上,以实现对机械臂的三个方向自由度。
107.具体地,请参考图8所示,在本发明的实施例当中,第二转动关节3包括第二伺服电机31和第二行星减速机32,第二行星减速机32远离第二伺服电机31的一侧固定连接在第二转动安装座212内,第二行星减速机32的输入轴与第二伺服电机31连接,第二行星减速机32的输出轴与大臂组件4连接,以适于第二转动关节3带动大臂组件4转动。
108.由此,第二转动关节3用于实现对大臂组件4的z轴方向运动需要。
109.具体地,请参考图10所示,在本发明的实施例当中,大臂组件4包含大臂41、大臂下连接结构42和大臂上连接结构43,大臂下连接结构42设置在大臂41靠近第二行星减速机32的一侧,以适于与第二行星减速机32的输出轴固定连接,大臂上连接结构43设置在大臂41的另一端的同侧,以适于与肘部组件5固定连接。
110.由此,大臂组件4通过大臂下连接结构42和大臂上连接结构43分别与第二转动关节3和肘部组件5的连接,
111.请参考图10所示,大臂41包括大臂本体411、一体连接在大臂本体411下端的大臂下安装座412和一体连接在大臂本体411上端的大臂上安装座413,大臂下安装座412适于与第二行星减速机32的端面固定连接,大臂上安装座413适于与肘部组件5固定连接。
112.大臂下连接结构42包括大臂下端盖421、第一过线轴承座422和深沟球轴承423,第一过线轴承座422和深沟球轴承423适于套设在转台走线槽213内,且大臂下端盖421适于盖设在大臂下安装座412上;
113.大臂上连接结构43包括大臂上端盖431和调整垫板432,调整垫板432安装在肘部组件5上,大臂上端盖431适于盖设在大臂上安装座413上。
114.需要说明的是,轴承设置为单个或多个滚针轴承或滚柱轴承或深沟球轴承或角接触球轴承等,主要承受径向载荷,主轴承为交叉滚子轴承或圆锥滚子轴承或双列角接触轴承等可承受较大弯矩。
115.具体地,请参考图11所示,在本发明的实施例当中,肘部组件5包括第一驱动部件51、第二驱动部件52、第一驱动外壳53和第二驱动外壳54,第一驱动部件51和第二驱动部件52呈水平垂直交叉设置在第一驱动外壳53和第二驱动外壳54内,第一驱动外壳53和第二驱动外壳54组合连接构成第一驱动部件51和第二驱动部件52的外壳。
116.第一驱动部件51伸出第一驱动外壳53的端部与大臂组件4的大臂上连接结构43固定连接;
117.第二驱动部件52伸出第二驱动外壳54的端部适于与外部结构连接。
118.由此,本发明通过将三四轴本体的驱动装置后置在三四轴本体上,有效降低六自由度机器人原来的二三轴的内部电机的负载率。
119.具体地,请参考图7所示,在本发明的实施例当中,第一驱动部件51包括三轴伺服电机511、三轴伺服电机座512、三轴驱动带轮513、第一同步带514和三轴减速机带轮组件515,三轴伺服电机511的输出轴与三轴驱动带轮513连接,三轴伺服电机座512的一侧与第一驱动外壳53的内表面固定连接,另一侧与三轴伺服电机511的端面固定连接,第一同步带514的一端包绕在三轴驱动带轮513上,另一端包绕在三轴减速机带轮组件515上;
120.三轴减速机带轮组件515包括三轴从动带轮5151、三轴过线套筒5152、外圈隔套5153、轴承5154和三轴轴承端盖5155,三轴从动带轮5151套设安装在三轴过线套筒5152的端部,外圈隔套5153和轴承5154依次安装在三轴过线套筒5152上,且三轴轴承端盖5155连接在三轴过线套筒5152的端部。
121.具体地,请参考图12所示,在本发明的实施例当中,第二驱动部件52包括四轴伺服电机521、四轴伺服电机座522、四轴驱动带轮523、第二同步带524和四轴减速机带轮组件525,四轴驱动带轮523固定连接在四轴伺服电机521的输出轴上,四轴伺服电机座522套设在四轴伺服电机521的输出轴上,其一侧与四轴伺服电机521的端面固定连接,另一端与第二驱动外壳54的内表面固定连接,第二同步带524的一端包绕在四轴驱动带轮523上,另一端包绕在四轴减速机带轮组件525上;
122.请参考图14所示,四轴减速机带轮组件525包括四轴从动带轮5251、四轴过线套筒5252、深沟球轴承5253和四轴轴承压盖5254,四轴从动带轮5251套设安装在四轴过线套筒5252的端部,深沟球轴承5253安装在四轴过线套筒5252上,且四轴轴承压盖5254连接在四轴过线套筒5252的端部。
123.具体地,请参考图15、16所示,在本发明的实施例当中,小臂组件6包括小臂61、小臂下连接结构62、小臂上连接结构63、五轴驱动组件64和六轴驱动组件65,小臂下连接结构62的一端连接在小臂61的底部,另一端固定连接在四轴减速机带轮组件525上。
124.请参考图17所示,小臂上连接结构63包括安装在小臂61顶端两侧的第一侧传动结构631和第二侧传动结构632,五轴驱动组件64和六轴驱动组件65分别平行反向安装在小臂61的内部,且五轴驱动组件64适于驱动第一侧传动结构631运动,六轴驱动组件65适于驱动第二侧传动结构632运动。
125.由此,五轴驱动组件64设置在小臂61内,用于为第一侧传动结构631提供动力,
126.具体地,请参考图17所示,在本发明的实施例当中,五轴驱动组件64包括五轴伺服电机641、五轴驱动轮642和五轴同步带643,五轴驱动轮642连接在五轴伺服电机641的输出轴上,五轴同步带643的一端包绕在五轴驱动轮642上。
127.由此,五轴伺服电机641的输出轴上通过键连接有五轴驱动轮642,五轴同步带643的一端连接在五轴驱动轮642上,五轴同步带643的另一端连接在五轴从动带轮6311上,在五轴伺服电机641的驱动力作用下,带动五轴驱动轮642作旋转运动,五轴驱动轮642又带动五轴同步带643啮合运动,从而驱动五轴从动带轮6311运动。
128.请参考图18所示,第一侧传动结构631包括五轴从动带轮6311、五轴减速机固定座6312、五轴谐波减速机6313和五轴同步带轮轴6314,五轴谐波减速机6313的输入轴与五轴
从动带轮6311连接,五轴减速机固定座6312套设在五轴从动带轮6311与五轴谐波减速机6313之间,且五轴减速机固定座6312连接在小臂61的内表面上,五轴谐波减速机6313的输出轴与五轴同步带轮轴6314连接。
129.由此,五轴同步带轮轴6314通过五轴减速机固定座6312连接在谐波减速机6313的输出轴上,五轴从动带轮6311连接在五轴同步带轮轴6314的末端。当五轴从动带轮6311在五轴驱动轮642的作用下作旋转运动,五轴从动带轮6311的运动输入到五轴谐波减速机6313中,带动五轴谐波减速机6313的输出轴运动,而五轴谐波减速机6313的输出轴与五轴同步带轮轴6314连接,从而带动五轴同步带轮轴6314作旋转运动。
130.请参考图17、20所示,第二侧传动结构632包括六轴从动带轮6321、六轴传动轴外座6322、六轴传动轴承6323、六轴传动轴内座6324、六轴传动轴6325、和谐波减速部件6327,六轴传动轴6325上从远离第一侧传动结构631的一侧依次设有六轴从动带轮6321、六轴传动轴外座6322、六轴传动轴承6323、六轴传动轴内座6324和第一伞齿轮6326,谐波减速部件6327安装在第一侧传动结构631和第二侧传动结构632之间的上方;
131.谐波减速部件6327包括从下至上依次安装有第二伞齿轮63271、轴承压紧环63272、伞齿轮轴连接器63273、六轴谐波减速机63274和输出法兰63275,谐波减速部件6327靠近第一伞齿轮6326的一端安装有第二伞齿轮63271,第二伞齿轮63271与第一伞齿轮6326啮合连接。
132.由此,六轴从动带轮6321的运动带动六轴传动轴6325运动,六轴传动轴6325的运动又带动六轴传动轴6325运动,六轴传动轴6325又将运动输入到谐波减速部件6327中,谐波减速部件6327中设有第二伞齿轮63271,从而带动第二伞齿轮63271运动。
133.具体地,请参考图7所示,在本发明的实施例当中,六轴驱动组件65设置在小臂61内,用于为第二侧传动结构632提供动力,其中六轴驱动组件65包括六轴伺服电机651、六轴驱动轮652和六轴同步带653,其中六轴伺服电机651与五轴伺服电机641的结构大致相同,两者呈相反方向放置在小臂61内,六轴伺服电机651的输出轴上通过键连接有六轴驱动轮652,带动六轴驱动轮652旋转,六轴同步带653的另一端连接在六轴从动带轮6321上。
134.第二侧传动结构632安装在小臂61的上顶部一侧,第二侧传动结构632包括六轴从动带轮6321、六轴传动轴外座6322、六轴传动轴承6323、六轴传动轴内座6324、六轴传动轴6325和伞齿轮6326,其中六轴从动带轮6321安装在六轴传动轴6325的一端,六轴传动轴内座6324和六轴传动轴外座6322均套设在六轴传动轴6325上,并且六轴传动轴承6323位于六轴传动轴内座6324和六轴传动轴外座6322之间,伞齿轮6326固定安装在六轴传动轴6325的另一端。
135.虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
