1.本发明涉及一种门锁、特别是机动车门锁,该门锁具有:锁定机构,该锁定机构主要包括转动锁叉和锁爪;和作用于锁定机构的关紧装置,其中,关紧装置具有:至少一个以机动方式驱动的操纵杆;与锁定机构构件相互作用的驱动爪;以及至少一个用于以机械方式中断在操纵杆与驱动爪之间的力流的解锁元件。
背景技术:
2.出于舒适性原因,门锁和特别是机动车门锁目前通常配备有关紧装置。这不仅适用于例如在后舱盖上的机动车门锁,而且也越来越多地适用于在侧门上的机动车门锁。借助于关紧装置,相关的机动车门锁被从之前且原本所占据的预锁定位置以机动方式转移到主锁定位置中。相反,通常以手动的方式实现占据预锁定位置,其中,操作者将所属的机动车门或机动车舱盖锁定直至到达预锁定位置中,然后以机动方式工作的关紧装置确保向主锁定位置中的过渡。这原则上得到了证明。
3.然而,在关紧机动车门或机动车舱盖时会出现下述的情况,即,例如操作者的衣服或其它物体、或者在最坏的情况下甚至一根或多根手指被夹住。为了应对这些情况,例如在de 10 2006 059 275 a1中描述了机动车舱盖的锁定过程的紧急中止。为此,监控舱盖的至少一个操纵杆,这可以通过接近传感器来实现。总体上,在紧急解锁时发生锁定过程的电中断,其中,在此情况下也设置有所属的执行机构的运动逆转。
4.在根据de 20 2008 015 789 u1的教导的用于紧急中断的另一处理方式中,驱动爪配设有顶出单元,所述顶出单元用于可选地中断关紧/打开过程。以这种方式,通过借助于顶出单元将驱动爪顶出,来进行关紧过程的紧急中断。
5.根据ep 0 979 915 a2的上述类型的现有技术提出下述的用于门或类似物的锁定装置,即,在操纵解锁元件时同时以机械方式中断操纵杆的驱动装置与关紧辅助装置或驱动爪之间的力流。为此,解锁元件或解锁机构直接作用于曲杆。为了紧急解锁,操纵手柄或后舱盖把手。由此使操纵杆摆动。由此,转动锁叉被完全放开并且在此情况下配备有相关的门锁的后舱盖在密封橡胶的压力下弹开。
6.现有技术原则上证明是可行的,这涉及在关紧过程中门锁或机动车门锁的紧急解锁的原理可能性。然而,在这种情况下通常这样工作,即,为了紧急解锁,必须对驱动爪或操纵杆施加作用,以便中断关紧装置的机械力流。这需要相当大的力,因为在关紧过程期间,操纵杆和驱动爪都通过机动驱动装置被施加作用,即以一定方式具有一种“预紧”。当在此使操纵杆运动或顶出驱动爪时,该预紧然后为了紧急中断或紧急解锁必须被克服,如这在现有技术中所教导的那样。由此部分地导致相当大的操纵力,解锁元件必须被施加这样的操纵力。这种提高的操纵力越来越多地被认为是干扰性的。在此本发明总体上作出补救。
技术实现要素:
7.本发明所要解决的技术问题是,进一步改进开头所述结构的门锁以及特别是机动
车门锁,使得相对于迄今为止的现有技术减小解锁元件所需的操纵力。
8.为了解决该技术问题,本发明在所述类型的门锁、特别是机动车门锁中提出,解锁元件为了紧急解锁而作用于基本上以不施加力的方式分开关紧装置的联接元件,该联接元件在此从其之前的状态“接合”过渡到“脱开”功能位置中。
9.因此,本发明除了强制的和以机动方式驱动的操纵杆和对锁定机构构件施加作用的驱动爪之外还附加地使用联接元件。在正常的关紧过程中,联接元件占据其位置“接合”。然后关紧装置总体上被机械锁定并且存在从机动驱动装置经由操纵杆、联接元件直到最后到驱动爪的连续的力流。
10.为此,驱动爪自身又例如可以可转动地支承在传递元件或传递杆上。相关的传递元件或传递杆此外还接纳可转动地支承在其上的联接元件,该联接元件通常是联接杆。联接杆自身又与操纵杆上的操纵轮廓至少在其“接合”位置中相互作用。然而,如果联接元件或联接杆位于其“脱开”位置中,则操纵杆不能以其操纵轮廓作用于联接元件,因此也不能对传递元件和可转动地支承在其上的驱动爪施加力。
11.在此,根据本发明总体上这样进行设计,即,解锁元件为了紧急解锁而作用于相关的联接元件。在此,联接元件从其之前占据的“接合”位置转移到“脱开”功能位置中。在此,同时基本上以不施加力的方式分开关紧装置。这在本发明的范围内应当被理解为:解锁元件仅作用于联接元件,以便使联接元件从其先前的“接合”状态转移到“脱开”功能位置中。在该过程中,操纵杆和驱动爪以及必要时传递元件保持其位置,即明确地不借助于解锁元件运动、摆动或类似地被施加力。
12.以这种方式可以基本上以不施加力的方式分开关紧装置的各个组成部分的机械连接,因为在此仅须克服在联接元件或联接杆与操纵杆上的操纵轮廓之间的可能的摩擦力。对操纵杆的附加的施加作用与对传递元件或驱动爪的附加的施加作用一样很少发生,使得联接元件或联接杆从其原本在关紧过程中占据的“接合”功能状态到“脱开”功能位置中的过渡与现有技术相比可以以特别小的力进行。
13.除了联接元件或联接杆之外,关紧装置的所有其余的功能元件在该过程中停留在其位置中。一旦关紧装置在联接元件的“脱开”功能状态中被以机械方式中断,借助于驱动爪被施加作用的锁定机构构件就能离开另一锁定机构构件,并且锁定机构直接占据其打开位置。所有这些都是成功的,其中操作者可以对解锁元件施加特别小的力,从而在关紧过程中可能的不舒适性可以以这种方式快速、不复杂且以较小的操纵力来应对。这是本发明的主要优点。
14.根据有利的设计方案,解锁元件两件式地构造有紧急解锁杆和顶出杆。顶出杆通常为了紧急解锁而与联接杆上的操纵栓部相互作用。为此,顶出杆有利地构造为c形的或u形的。在大多数情况下,顶出杆具有联接臂和操纵臂。
15.顶出杆的操纵臂通常具有用于与紧急解锁杆上的操纵凸出部接合的轮廓。紧急解锁杆自身又在通常情况下构造为双臂杆或三臂杆。紧急解锁杆的一个臂起到操纵凸出部的作用,该操纵凸出部接合到顶出杆的操纵臂上的轮廓中。
16.在顶出杆上除了操纵臂之外还设置的联接臂通常具有用于联接杆的操纵栓部的止挡棱边。顶出杆自身又以能围绕轴转动的方式支承。此外,顶出杆在大多数情况下可以在平行于锁定机构平面布置的解锁平面中运动。锁定机构平面在此典型地由作为锁定机构的
组成部分的转动锁叉和至少一个锁爪展开。而解锁平面与锁定机构平面平行地布置在锁定机构平面上方或下方。顶出杆也位于解锁平面中。
17.在大多数情况下这样进行设计,即,紧急解锁杆与顶出杆一起展开相关的解锁平面。由此,紧急解锁杆以及顶出杆作为两件式解锁元件的两个组成部分在拓扑学方面与锁定机构脱耦并且因此也不会在此情况下导致不期望的相互作用。而紧急解锁杆则作用于顶出杆,该顶出杆自身又以联接臂上的止挡棱边作用于联接杆的操纵栓部。在此,联接杆与传递元件一起位于另一第三平面中,该第三平面在大多数情况下布置在锁定机构平面与解锁平面之间。由此,各个杆可以在功能上特别简单地彼此脱耦。
18.驱动爪自身又在大多数情况下布置在锁定机构平面中。因为驱动爪典型地作用于锁爪和/或转动锁叉以用于关紧的目的。在大多数情况下这样设计,即,驱动爪在关紧时作用在转动锁叉的轮廓上并且使转动锁叉从其之前手动占据的预锁定位置出发转移到主锁定位置中。但原则上,驱动爪也可以作用于锁爪,以便使锁定机构总体上从预锁定位置转移到主锁定位置中。
19.结果提供了一种门锁和特别是机动车门锁,其能实现以特别小的力紧急解锁。其核心在于,解锁元件为了紧急解锁而作用于作为关紧装置的组成部分的联接元件,该联接元件在所述过程中基本上以不施加力的方式分开关紧装置。
20.解锁元件在此典型地可以被操作者手动地施加作用。为此,例如紧急解锁杆可以作为解锁元件的组成部分连接在门把手、舱盖把手等上,或者除了这种把手之外也可以实现。因此一旦关紧过程应被从操作者方面中断,这就可以直接通过对手柄并因此对解锁元件施加作用来实现。
21.因为在此关紧装置基本上以不施加力的方式被分开,所以关紧过程可以在实际上任何阶段中被以机械方式中断,而不会遇到任何困难。所有这些过程都特别快速且有效地实现,因为仅需要手动地对解锁元件施加很小的操纵力。这是本发明的主要优点。
附图说明
22.下面根据仅示出一个实施例的附图详细说明本发明;图中示出:
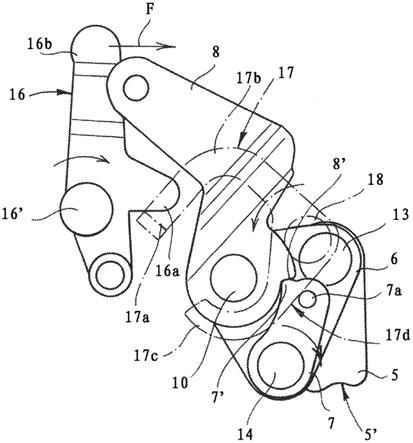
23.图1以概览图示出根据本发明的机动车门锁,
24.图2a
‑
2c分别在前视图和后视图中示出关紧过程的不同阶段,
25.图3a示出在关紧过程中紧急解锁或紧急中断的开始,和
26.图3b示出所实现的紧急解锁或紧急中断。
具体实施方式
27.在附图中示出门锁,该门锁在本实施例的范围内是机动车门锁。在此,所示出的机动车门锁例如可以构造为后舱盖锁、侧门锁或油箱盖锁、前罩锁等。在图1中示出机动车门锁处于其主锁定位置中。为了占据该功能位置,在图1中示出的锁销1首先移动到进入口2中,直至到达那里的转动锁叉3的、在图1中以点划线表示的预锁定位置。转动锁叉3从以点划线表示的预锁定位置到在图1中以实线表示的主锁定位置中的过渡这样进行,使得根据该实施例,关紧装置5、6、7、8、9;16、17作用于所示出的且实现的、包括转动锁叉3和锁爪4的锁定机构3、4。
28.关紧装置5至9;16、17具有至少一个以机动方式驱动的操纵杆8。为此,在附图中设置有机动驱动装置9,该机动驱动装置在关紧过程中相应于图2a至图2c中的图示在分别在左侧示出的前视图中这样对操纵杆8施加作用,使得操纵杆8执行例如在图2a中在前视图中所示的、围绕其轴10的逆时针运动。机动驱动装置9典型地是电机,一旦附加设置的传感器12确定占据锁定机构3、4的预锁定位置,所述电机就被所示出的控制装置11施加作用。传感器12可以为此查询在图1中以点划线表示的转动锁叉3预锁定位置。一旦锁定机构3、4已经到达预锁定位置,控制单元11通过对机动驱动装置9施加作用而确保:操纵杆8在前视图中并且相应于图2a至图2c中的图示沿逆时针方向围绕其轴10以机动方式摆动。
29.关紧装置5、6、7、8、9;16、17根据该实施例附加地还包括驱动爪5,该驱动爪以能围绕轴13转动的方式支承在传递元件或传递杆6上。同样在传递元件或传递杆6上可转动地支承有联接杆7,该联接杆为此以能围绕自身的轴14转动的方式支承。联接杆7和驱动爪5在此布置和支承在传递杆6的对置的侧上。
30.联接杆7配备有操纵凸出部7',该操纵凸出部与操纵杆8上的操纵轮廓8'相互作用,如下面还将详细阐述的那样。
31.根据该实施例,驱动爪5与锁定机构构件3、4、具体而言与转动锁叉3相互作用。为此,转动锁叉3具有操纵轮廓3',驱动爪5上的另一操纵轮廓5'接合到该操纵轮廓中或者与该操纵轮廓相互作用,以便使转动锁叉3从图1中的以点划线表示的预锁定位置转移到以实线表示的主锁定位置中。在此,转动锁叉3围绕其轴15沿图1中示出的逆时针方向摆动。同时,在该过程中,锁销1被抓住并固定在主锁定位置中。因为在锁定机构3、4的主锁定位置中,锁爪4可以如通常那样落入转动锁叉3中并且用于固定转动锁叉3。
32.除了关紧装置5至9;16、17的以机动方式驱动的操纵杆8和与锁定机构构件3、4相互作用的驱动爪5之外,根据本发明的机动车门锁还具有作为关紧装置5至9;16、17的组成部分的解锁元件16、17作为主要功能元件。借助于解锁元件16、17可以中断在操纵杆8与驱动爪5之间的力流,或者总体上以机械方式分开关紧装置5至9;16、17。为此并且为了紧急解锁或紧急中断,解锁元件16、17作用于之前已经描述的联接元件或联接杆7。
33.实际上根据本发明这样进行设计,即,解锁元件16、17为了紧急解锁或紧急中断关紧装置5至9;16、17而作用于联接杆7,所述联接杆基本上以不施加力的方式分开关紧装置5至9;16、17,在此该联接杆从其之前的“接合”状态过渡到“脱开”功能位置中。这将在下面参照图2a至图2c或图3a和图3b进行详细说明。
34.解锁元件16、17自身又两件式地构造成具有紧急解锁杆16和顶出杆17。这在对比观察图3a和图3b时最清楚地看出,图3a和图3b分别在后视图中简化地示出机动车门锁的主要组成部分。
35.紧急解锁杆16构造为双臂杆或三臂杆。根据该实施例,紧急解锁杆16作为三臂杆一方面配备有操纵凸出部16a并且另一方面配备有操纵臂16b。如特别根据图3a和图3b可看出的那样,紧急解锁杆16的操纵臂16b可以被手动地施加在此示出的力f。该力f由操作者在下述情况下施加到紧急解锁杆16上,即,关紧装置5至9;16、17在关紧过程中必须被中断,以便例如直接放开被夹住的衣服或也直接放开手指。为此,紧急解锁杆16自身又可以连接到门把手上或一般连接到把手上,这当然仅是示例性的并且不是强制性的。
36.无论如何,在图3a中示出的并且由操作者为了紧急解锁而在紧急解锁杆16上建立
的力f都会引起紧急解锁杆16围绕其轴16'沿在图3a中示出的顺时针方向摆动。因此,紧急解锁杆16以其操纵凸出部16a接合到顶出杆17上的轮廓17a中或者与相关的轮廓17a相互作用。
37.顶出杆17自身又构造为c形的或u形的。由此,顶出杆17一方面具有带有已经提到的轮廓17a的操纵臂17b并且另一方面具有带有止挡棱边17d的联接臂17c。顶出杆17自身又以能围绕轴18转动的方式被支承。顶出杆17的联接臂17c上的止挡棱边17d与联接杆7上的一个操纵栓部7a相互作用。
38.在此,在拓扑学方面的设计总体上涉及如下,即,两个锁定机构构件3、4、即转动锁叉3和锁爪4连同其所属的轴一起确定锁定机构平面,驱动爪5也位于该锁定机构平面中。紧急解锁杆16和顶出杆17自身又共同限定了解锁平面并且展开该解锁平面,该解锁平面平行于锁定机构平面并且根据参照图3a的俯视图中的实施例布置在该锁定机构平面上方。在解锁平面与锁定机构平面之间还设置有另一第三平面,传递元件或传递杆6和联接元件或联接杆7绝大部分位于该第三平面中。由此,各个前述功能元件可以相互独立地并且没有相互影响地施加作用和运动,如下面还将进一步阐述的那样。
39.在图2a至图2c中,一般性地、即分别在前视图的左侧部分和后视图的右侧部分示出关紧过程。关紧驱动装置5至9;16、17从根据图2a的功能位置开始位于其起始位置或初始位置中。一旦机动驱动装置9从控制单元11在询问传感器12之后检测到锁定机构3,4的预锁定信号,控制单元11对驱动装置9施加作用,使得在前视图中在从图2a到图2b的过渡中操纵杆8沿所示的逆时针方向围绕其轴10摆动。在此,驱动爪5在示图中向下运动并且可以与转动锁叉3上的轮廓3'相互作用,其中,驱动爪5上的轮廓5'贴靠在转动锁叉3的相关的轮廓3'上。由于驱动爪5的这种向下运动,转动锁叉3围绕其轴15从根据图1的以点划线表示的预锁定位置出发沿逆时针方向围绕轴15摆动,即朝着主锁定位置的方向摆动。
40.驱动爪5的所示出的向下运动通过如下方式解释,即,可在关紧过程开始时观察到的、操纵杆8围绕其轴10的逆时针运动引起,可转动地连接在操纵杆8上的传递杆6在该过程中同样沿逆时针方向运动并且由此驱动爪5执行之前已经描述的向下运动。
41.现在,在图2c中示出锁定过程的结束。在该整个功能顺序中,联接杆7处于其在图3a中放大示出的“接合”功能位置中。与此相对应的是,联接杆7上的凸出部7'与操纵杆8上的操纵轮廓8'相互作用或接合到该操纵轮廓8'中。由此实现了关紧装置5至9;16、17的锁定的杆链,并且能够按期望地将力从驱动装置9开始经由操纵杆8、联接杆7、传递杆6最后传递到驱动爪5上并且因此传递到转动锁叉3上以用于将其关紧。
42.如果该关紧过程在紧急解锁或紧急中断时结束并且力流中断,则本发明提出,解锁元件16、17为了紧急解锁而作用于联接杆7,该联接杆基本上以不施加力的方式分开关紧装置5至9;16、17。这在从图3a到图3b的过渡中可以看出。实际上,图3a对应于这种紧急解锁的开始。
43.为此,由操作者对紧急解锁杆16施加力f,使得紧急解锁杆16围绕其轴16'沿在图3a中示出的顺时针方向摆动。由此,紧急解锁杆16上的操纵凸出部16a与顶出杆17上的轮廓17a接合。因此,顶出杆17沿所示出的逆时针方向围绕其轴18摆动。由此,顶出杆17上的止挡棱边17d向联接杆7的操纵栓部7a移动。
44.这引起,在从图3a向图3b的过渡中,联接杆7围绕其轴14沿顺时针方向摆动并且因
此联接杆7上的凸出部7'脱离操纵杆8的操纵轮廓8'。联接杆7在该过程中从其之前占据的、对应于图3a中示出的“接合”功能位置过渡到根据图3b中示出的“脱开”功能状态中。在此基本上以不施加力的方式分开关紧装置5至9;16、17,因为不仅操纵杆8而且传递杆6以及驱动爪5都保持其位置并且在该过程中不会或最多略微地为了克服在操纵凸出部7'与轮廓8'之间的摩擦力而被施加作用。由此可以在任何时候且以小的操纵力f进行关紧装置5至9;16、17的力流中断的所述过程。
45.在根据图3b的功能位置中,联接杆7现在占据其“脱开”位置。由此,转动锁叉3可以在弹簧支持下使驱动爪5向上运动,从而锁销1直接脱离并且可以打开配备有所述机动车门锁的机动车门或机动车舱盖。之前被夹住的衣服或手指可以直接从相关的车门或舱盖与机动车车身之间的缝隙中抽出。
46.附图标记列表:
47.锁销1止挡棱边17d
48.进入口2轴18
49.转动锁叉3力f
50.操纵轮廓3'
51.锁爪4
52.锁定机构3、4
53.驱动爪5
54.操纵轮廓5'
55.关紧装置5、6、7、8、9
56.传递杆6
57.联接杆7
58.操纵凸出部7'
59.操纵杆8
60.操纵轮廓8'
61.驱动装置9
62.轴10
63.控制单元11
64.传感器12
65.轴13
66.轴14
67.轴15
68.轴16'
69.解锁元件16、17
70.操纵凸出部16a
71.操纵臂16b
72.顶出杆17
73.轮廓17a
74.操纵臂17b
75.联接臂17c
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。