技术特征:
1.一种方法,包括以下步骤:通过第一机械臂将校准对象以目标定向放置在电子处理系统的第一站中;通过所述第一机械臂从所述第一站检取所述校准对象;使用所述第一机械臂、第二机械臂或装载锁定中的至少一者将所述校准对象传送至对准器站,其中所述对准器站被容纳在所述电子处理系统的工厂接口中或连接至所述工厂接口,其中所述校准对象具有所述对准器站处的第一定向;确定所述对准器站处的所述第一定向;基于所述对准器站处的所述第一定向确定与所述第一站相关联的第一特征误差值;以及将所述第一特征误差值记录在存储介质中,其中所述对准器站使用所述第一特征误差值来对准将放置在所述第一站中的对象。2.如权利要求1所述的方法,其中所述第一机械臂是所述电子处理系统的传送腔室的机械臂,其中所述第一站在连接至所述传送腔室的处理腔室中,并且其中将所述校准对象传送至所述对准器站的步骤包括以下步骤:通过所述第一机械臂将所述校准对象放置在连接至所述传送腔室的所述装载锁定中;通过连接至所述装载锁定的所述工厂接口的所述第二机械臂从所述装载锁定检取所述校准对象;以及通过所述第二机械臂将所述校准对象放置在所述对准器站处。3.如权利要求2所述的方法,进一步包括以下步骤:通过所述第二机械臂从所述电子处理系统中的第二站检取对象;通过所述第二机械臂将所述对象放置在所述对准器站处;确定所述对象将被放置在所述处理腔室中;使用所述第一特征误差值来对准所述对象,其中所述对准器站将所述对象对准至经校正的目标定向,所述经校正的目标定向是基于由所述第一特征误差值调整的初始目标定向;通过所述第二机械臂从所述对准器站检取所述对象;将所述对象放置在所述装载锁定中;通过所述第一机械臂从所述装载锁定检取所述对象;以及通过所述第一机械臂将所述对象放置在所述处理腔室中,其中放置在所述处理腔室中的所述对象大致具有所述处理腔室中的所述目标定向。4.如权利要求3所述的方法,其中所述对象是工艺配件环。5.如权利要求3所述的方法,其中所述对象是晶片。6.如权利要求3所述的方法,其中放置在所述处理腔室中的所述对象具有在0.2
°
的准确度以内的所述处理腔室中的所述目标定向。7.如权利要求1所述的方法,其中所述第一机械臂是所述工厂接口的机械臂,其中所述第一站在装载锁定、载入口或前开式标准舱(foup)中的一者中,并且其中将所述校准对象传送至所述对准器站的步骤包括以下步骤:通过所述第一机械臂将所述校准对象放置在所述对准器站处。8.如权利要求7所述的方法,进一步包括以下步骤:
通过所述第一机械臂从所述电子处理系统中的第二站检取对象;通过所述第一机械臂将所述对象放置在所述对准器站处;确定所述对象将被放置在所述第一站中;使用所述第一特征误差值来对准所述对象,其中所述对准器站将所述对象对准至经校正的目标定向,所述经校正的目标定向是基于由所述第一特征误差值调整的初始目标定向;通过所述第一机械臂从所述对准器检取所述对象;以及通过所述第一机械臂将所述对象放置在所述第一站中,其中放置在所述第一站中的所述对象大致具有所述第一站中的所述目标定向。9.如权利要求8所述的方法,其中所述对象包括晶片。10.如权利要求8所述的方法,其中放置在所述第一站中的所述对象具有在0.2
°
的准确度以内的所述第一站中的所述目标定向。11.如权利要求1所述的方法,进一步包括以下步骤:确定所述对准器站处的所述第一定向与所述对准器站处的初始目标定向之间的差,其中所述对准器站处的所述初始目标定向与所述第一站中的所述目标定向相关联;其中基于所述第一定向与所述初始目标定向之间的所述差来确定所述第一特征误差值。12.如权利要求11所述的方法,其中所述校准对象具有所述第一站中的目标定位,并且其中所述校准对象具有所述对准器站处的第一定位,所述方法进一步包括以下步骤:确定所述对准器站处的所述第一定位与所述对准器站处的初始目标定位之间的差,其中所述对准器站处的所述初始目标定位与所述第一站中的所述目标定位相关联;基于所述第一定位与所述初始目标定位之间的所述差来确定与所述第一站相关联的一个或多个额外特征误差值;以及将所述一个或多个额外特征误差值记录在所述存储介质中,其中所述对准器站使用所述一个或多个额外特征误差值来对准将放置在所述第一站中的对象。13.如权利要求12所述的方法,其中所述目标定位包括目标x定位和目标y定位,其中所述第一定位包括第一x定位和第一y定位,其中所述初始目标定位包括初始目标x定位和初始目标y定位,并且其中所述一个或多个额外特征误差值包括与所述x定位的误差相关联的第二特征误差值以及与所述y定位的误差相关联的第三特征误差值。14.如权利要求1所述的方法,其中所述第一站的基板支撑件包括多个配准特征,并且所述校准对象包括对应的多个运动学耦接接口,所述方法进一步包括以下步骤:在从所述第一站检取所述校准对象之前,通过所述第一机械臂将所述校准对象放置在所述第一站中,其中,响应于所述校准对象被放置在所述第一站中的所述基板支撑件处,所述多个运动学耦接接口中的每个运动学耦接接口与所述多个配准特征中的配置特征接合,以使得以所述目标定向放置所述校准对象。15.如权利要求14所述的方法,其中所述多个配准特征包括多个升降杆或多个静态配准特征。16.如权利要求1所述的方法,其中所述第一站的基板支撑件包括第一多个配准特征和第二多个配准特征,并且其中所述校准对象包括对应的第一多个运动学耦接接口和对应的
第二多个运动学耦接接口,所述方法进一步包括以下步骤:将所述第一多个运动学耦接接口与所述第一多个配准特征接合,以将所述第二多个运动学耦接接口引导至所述第二多个配准特征上;以及随后将所述第二多个运动学耦接接口与所述第二多个配准特征接合,以将所述校准对象引导至所述目标定向。17.如权利要求16所述的方法,其中所述第一多个配准特征包括第一多个升降杆,其中所述第二多个配准特征包括多个静态配准特征,所述方法进一步包括以下步骤:提升所述第一多个升降杆以使所述第一多个运动学耦接接口与所述第一多个升降杆接合;以及降低所述第一多个升降杆以使所述第二多个运动学耦接接口与所述多个静态配准特征接合并且使所述第一多个升降杆与所述第一多个运动学耦接接口脱离。18.如权利要求17所述的方法,进一步包括以下步骤:使用第二多个升降杆来提升所述校准对象,同时将所述校准对象维持在所述目标定向,其中在所述校准对象被所述第二多个升降杆提升的同时检取所述校准对象。19.如权利要求1所述的方法,进一步包括以下步骤:重复所述以所述第一站中的所述目标定向来放置所述校准对象、所述从所述第一站检取所述校准对象、所述将所述校准对象传送至所述对准器站、所述确定所述对准器站处的所述第一定向以及所述确定所述第一特征误差值多次;确定由于所述重复所述以所述第一站中的所述目标定向来放置所述校准对象、所述从所述第一站检取所述校准对象、所述将所述校准对象传送至所述对准器站、所述确定所述对准器站处的所述第一定向以及所述确定所述第一特征误差值所述多次所导致的所述第一特征误差值的标准偏差;以及基于所述标准偏差来确定所述对准器站与所述第一站之间的传送序列的准确性。20.如权利要求1所述的方法,进一步包括以下步骤:重复所述以所述第一站中的所述目标定向来放置所述校准对象以及所述从所述第一站检取所述校准对象;重复所述将所述校准对象传送至所述对准器站,其中所述校准对象具有所述对准器站处的第二定向;确定所述对准器站处的所述第二定向;基于所述第二定向来确定与所述第一站相关联的第二特征误差值;以及确定所述对准器站与所述第一站之间的传送序列不再处于校准。21.一种用于电子处理系统的校准对象,包括:主体,所述主体尺寸设计成适合穿过所述电子处理系统的狭缝阀;在所述主体中的第一多个运动学耦接接口,所述第一多个运动学耦接接口被配置成与所述电子处理系统的第一站的相应第一多个配准特征接合,并且将所述校准对象引导至所述站处的目标定位和目标定向;以及安置在所述主体的一侧处的基准,其中所述基准可用于确定所述校准对象的定向。22.如权利要求21所述的校准对象,其中所述主体是圆盘形主体或环形主体。23.如权利要求21所述的校准对象,进一步包括:
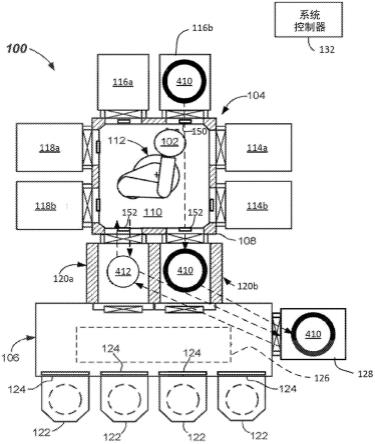
在所述主体中的第二多个运动学耦接接口,所述第二多个运动学耦接接口被配置成与所述电子处理系统的所述第一站或第二站的相应第二多个配准特征接合。24.如权利要求23所述的校准对象,其中所述第二多个配准特征是在所述第一站中,其中所述第一多个运动学耦接接口具有第一导入部,其中所述第二多个运动学耦接接口具有比所述第一导入部大的第二导入部,并且其中所述第二多个运动学耦接接口被配置成与所述第二多个配准特征接合以将所述第一多个运动学耦接接口引导至所述第一多个配准特征上。25.如权利要求24所述的校准对象,其中所述第一多个运动学耦接接口包括在所述主体的底表面中的多个凹槽,并且其中所述第二多个运动学耦接接口包括接近所述主体的外周边的多个区域。26.如权利要求21所述的校准对象,其中所述主体是固体烧结陶瓷主体,所述固体烧结陶瓷主体可在高达大致400℃的温度下使用而不会损坏所述校准对象。27.如权利要求21所述的校准对象,其中所述主体具有是所述第一站处的基板支撑件的表面的负像的形状。28.如权利要求21所述的校准对象,进一步包括:左侧切口,所述左侧切口在所述主体的左侧中;以及右侧切口,所述右侧切口在所述主体的右侧中;其中所述左侧切口和所述右侧切口可用于基于保持所述校准对象的机械臂的第一定位与保持所述校准对象的所述机械臂的第二定位之间的差来检测所述校准对象的定向,在所述第一定位处所述左侧切口被局部定心器检测到,在所述第二定位处所述右侧切口被所述局部定心器检测到。29.如权利要求28所述的校准对象,其中所述右侧切口是所述左侧切口的镜像。30.如权利要求21所述的校准对象,其中所述基准包括至少一个凹口、至少一个平坦部、至少一个突起、至少一个槽、或以上各项的组合。31.如权利要求21所述的校准对象,其中所述主体是圆盘形主体,所述校准对象进一步包括:在所述主体中的多个弧形切口,所述多个弧形切口偏离所述主体的外周边,其中所述弧形切口中的每一者的至少一侧的第一机器容差大于所述主体的所述外周边的第二机器容差。32.一种电子处理系统,包括:传送腔室,所述传送腔室包括第一机械臂;多个处理腔室,所述多个处理腔室连接至所述传送腔室;装载锁定,所述装载锁定连接至所述传送腔室;工厂接口,所述工厂接口连接至所述装载锁定,所述工厂接口包括第二机械臂和对准器站;以及控制器,所述控制器操作地连接至所述第一机械臂、所述第二机械臂和所述对准器站,其中所述控制器用于:使所述第一机械臂或所述第二机械臂从电子处理系统的第一站检取校准对象,所述校准对象具有所述第一站中的目标定向,其中所述第一站是在所述多个处理腔室中的处理腔
室、所述装载锁定、所述工厂接口的装载端口、或耦接至所述工厂接口的前开式标准舱(foup)中;使所述校准对象使用所述第一机械臂、所述第二机械臂或所述装载锁定中的至少一者被传送至所述对准器站,其中所述校准对象具有所述对准器站处的第一定向;确定所述对准器站处的所述第一定向与所述对准器站处的初始目标定向之间的差,其中所述对准器站处的所述初始目标定向与所述第一站中的所述目标定向相关联;基于所述第一定向与所述初始目标定向之间的所述差确定与所述第一站相关联的第一特征误差值;以及将所述第一特征误差值记录在存储介质中,其中所述对准器站使用所述第一特征误差值来对准将放置在所述第一站中的对象。33.一种方法,包括以下步骤:通过在工厂接口或传送腔室中的第一者中的第一机械臂将校准对象放置至装载锁定中,所述装载锁定使所述工厂接口与所述传送腔室分离开,其中所述校准对象被放置至所述装载锁定中,使得校准对象中心在与所述第一机械臂的第一教示定位相关联的第一目标位置处,其中所述第一机械臂的第一叶片的第一凹穴中心标称地对应于所述第一教示定位的所述第一目标位置,并且其中所述工厂接口、所述传送腔室和所述装载锁定是电子处理系统的部件;通过在所述工厂接口或所述传送腔室中的第二者中的第二机械臂使用所述第二机械臂的第二教示定位将所述校准对象从所述装载锁定检取至所述第二机械臂的第二叶片上,其中所述第二叶片的第二凹穴中心标称地对应于所述第二教示定位的所述第一目标位置,并且其中在检取所述校准对象之后,所述校准对象中心从所述第二凹穴中心偏移了第一偏移量;使用在所述工厂接口或所述传送腔室中的所述第二者中或连接至所述第二者的传感器来确定所述校准对象中心与所述第二凹穴中心之间的所述第一偏移量;基于所述第一偏移量确定第一特征误差值,所述第一特征误差值表示所述第一机械臂的所述第一教示定位与所述第二机械臂的所述第二教示定位之间的失准;以及将所述第一特征误差值记录在存储介质中,其中所述第一机械臂或所述第二机械臂中的一者使用所述第一特征误差值来补偿经由所述装载锁定在所述第一机械臂与所述第二机械臂之间传送的对象的所述失准。34.如权利要求33所述的方法,其中所述第一机械臂是在所述传送腔室中,其中所述第二机械臂是在所述工厂接口中,其中所述传感器包括在所述工厂接口中或附接至所述工厂接口的对准站,所述方法进一步包括以下步骤:通过所述第二机械臂将所述校准对象放置至所述对准站上。35.如权利要求34所述的方法,进一步包括以下步骤:通过所述第二机械臂使用可选地由所述第一特征误差值修改的所述第二机械臂的所述第二教示定位将要处理的基板放置至所述装载锁定中;通过所述第一机械臂使用可选地由所述第一特征误差值修改的所述第一机械臂的所述第一教示定位从所述装载锁定检取所述基板,其中基于所述第一特征误差值修改所述第一教示定位或所述第二教示定位中的一者以补偿所述第一偏移量;
使用在所述装载锁定与所述传送腔室之间的接口处的局部定心器来确定在所述基板的基板中心与所述第一凹穴中心之间是否存在新的偏移;响应于确定所述新的偏移存在,确定所述第一机械臂的所述第一教示定位或所述第二机械臂的所述第二教示定位中的至少一者已改变。36.如权利要求35所述的方法,进一步包括以下步骤:确定所述新的偏移是否超过偏移阈值;以及响应于确定所述新的偏移超过所述偏移阈值,发起校准程序。37.如权利要求33所述的方法,进一步包括以下步骤:通过所述第一机械臂使用可选地由所述第一特征误差值修改的所述第一机械臂的所述第一教示定位将所述校准对象放置至所述装载锁定中;通过所述第二机械臂使用可选地由所述第一特征误差值修改的所述第二机械臂的所述第二教示定位从所述装载锁定检取所述校准对象,其中基于所述第一特征误差值修改所述第一教示定位或所述第二教示定位中的一者以补偿所述第一偏移量,并且其中在检取所述校准对象之后,所述校准对象中心从所述第二凹穴中心偏移第二偏移量;以及使用所述传感器确定所述校准对象中心与所述第二凹穴中心之间的所述第二偏移量。38.如权利要求37所述的方法,进一步包括以下步骤:确定所述第二偏移量超过偏移阈值;基于所述第二偏移量确定更新的特征误差值;以及将所述更新的特征误差值记录在所述存储介质中。39.如权利要求37所述的方法,进一步包括以下步骤:确定所述第二偏移量小于偏移阈值;以及保持所述第一特征误差值不变。40.如权利要求1所述的方法,其中所述第一机械臂是在所述工厂接口中,其中所述第二机械臂是在所述传送腔室中,其中所述传感器包括在所述装载锁定与所述传送腔室之间的接口处的局部定心器,并且其中在通过所述第二机械臂从所述装载锁定移除所述校准对象的同时确定所述校准对象中心与所述第二凹穴中心之间的所述第一偏移量。41.如权利要求40所述的方法,进一步包括以下步骤:通过所述第一机械臂使用可选地由所述第一特征误差值修改的所述第一机械臂的所述第一教示定位将要处理的基板放置至所述装载锁定中;通过所述第二机械臂使用可选地由所述第一特征误差值修改的所述第二教示定位从所述装载锁定检取所述基板,其中基于所述第一特征误差值修改所述第一教示定位或所述第二教示定位中的一者以补偿所述第一偏移量;使用所述局部定心器确定在所述基板的基板中心与所述第二凹穴中心之间是否存在新的偏移;以及响应于确定所述新的偏移存在,确定所述第一机械臂的所述第一教示定位或所述第二机械臂的所述第二教示定位中的至少一者已改变。42.如权利要求41所述的方法,进一步包括以下步骤:确定所述新的偏移是否超过偏移阈值;以及响应于确定所述新的偏移超过所述偏移阈值,发起校准程序。
43.如权利要求33所述的方法,进一步包括以下步骤:重复所述通过所述第一机械臂放置所述校准对象、所述通过所述第二机械臂检取所述校准对象、所述确定所述第一偏移量以及所述确定所述第一特征误差值多次;确定由于所述重复所述通过所述第一机械臂放置所述校准对象、所述通过所述第二机械臂检取所述校准对象、所述确定所述第一偏移量以及所述确定所述第一特征误差值所述多次所导致的所述第一特征误差值的标准偏差;以及基于所述标准偏差确定经由所述装载锁定在所述第一机械臂与所述第二机械臂之间的传送序列的准确性。44.如权利要求33所述的方法,其中所述校准对象包括基板。45.一种电子处理系统,包括:工厂接口;装载锁定,其中所述装载锁定的第一侧连接至所述工厂接口;传送腔室,所述传送腔室连接至所述装载锁定的第二侧;以及控制器,其中所述控制器用于执行权利要求33至44中任一项所述的方法。
技术总结
通过第一机械臂将校准对象以目标定向放置在电子处理设备的第一站中,并且接着通过第一机械臂从所述站检取。使用第一机械臂、第二机械臂和/或装载锁定将校准对象传送至对准器站,其中校准对象具有对准器站处的第一定向。确定对准器站处的第一定向。基于第一定向确定特征误差值。对准器站使用特征误差值来对准将放置在第一站中的对象。放置在第一站中的对象。放置在第一站中的对象。
技术研发人员:N
受保护的技术使用者:应用材料公司
技术研发日:2021.03.16
技术公布日:2022/11/11
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。