1.本发明涉及数控机床领域,特别涉及一种用于生产线的机器人控制方法、生产线及数控机床。
背景技术:
2.目前国内工业机器人技术领域,对单一产品进行搬运作业具有较高效率,但在少批量多品种的加工环境下就只能通过人工手动不断地更换夹具或者通过人工改变机器人程序配合快换装置进行夹具的更换,不能根据产品的变化自动更换夹具,从而影响生产效率。
技术实现要素:
3.本发明要解决的技术问题是为了克服现有技术中生产线的工作效率低,人工干预情况多导致的容易出错的缺陷,提供一种能够降低人工对生产线的干预,提高生产效率,减少生产事故,同时提高生产线中各设备的兼容性,为混线生产提供条件的用于生产线的机器人控制方法、生产线及数控机床。
4.本发明是通过下述技术方案来解决上述技术问题:一种用于生产线的机器人控制方法,所述生产线包括一处理装置、一机器人、一供料装置、摄像装置以及若干加工装置,所述机器人包括一夹持装置,所述机器人控制方法包括:所述摄像装置拍摄供料装置上的工件以获取检测影像;所述处理装置根据检测影像获取所述工件的工件编码;获取机器人当前夹持装置的夹具编码;判断当前时刻夹具编码与工件编码是否匹配,若是则调用机器人夹持所述工件送至工件编码对应的所述加工装置,若否则根据工件编码更换夹持装置。
5.较佳地,所述供料装置包括一料仓,每一工件上设有一识别码,所述机器人控制方法包括:所述料仓将工件以预设姿态摆放;所述处理装置识别所述检测影像中的识别码以获取所述工件的工件编码,所述工件编码包括二维码和条形码。
6.较佳地,所述供料装置包括一传送带,所述机器人控制方法包括:所述处理装置识别检测影像中工件的特征点;根据工件的特征点获取传送带上工件的摆放姿态以及工件编码;处理装置判断当前时刻夹具编码与工件编码是否匹配,若是调用机器人按照摆放姿态对应的夹持方向夹持所述工件送至工件编码对应的所述加工装置。
7.较佳地,所述摄像装置包括两颗摄像头,第一摄像头的拍摄区域覆盖所述传送带上机器人的取件区域,第二摄像头的拍摄区域覆盖传送带上所述取件区域之前的工件摆放
区域,所述机器人控制方法包括:所述第一摄像头在机器人取件时拍摄机器人取件影像以获取若干取件影像,第二摄像头在机器人取件时拍摄传送带停留时传送工件的影像;所述处理装置识别传送工件的影像中工件及传送带的特征点,并根据所述工件及传送带的特征点获取传送工件在传送带上的位置坐标以及传送工件摆放方向作为传送工件的姿态数据;所述处理装置根据第二摄像头与传送带的固定位置关系、取件区域之前的工件摆放区域到取件区域的距离、传送工件的姿态数据以及预设算法推算出传送工件在取件区域时的摆放姿态;所述处理装置根据推算出的传送工件摆放姿态以及工件编码判断传送工件在取件区域时的夹具编码与工件编码是否匹配,若否则在夹具库中调用传送工件对应的夹具做更换夹具准备;所述处理装置根据推算出的传送工件摆放姿态控制所述机器人夹取位于取件区域的传送工件。
8.较佳地,所述机器人及夹具上设有识别标记,所述机器人控制方法包括:所述处理装置识别所述若干取件影像上的工件的特征点以及所述识别标记;根据特征点及识别标记获取机器人夹取工件之前的夹取精度以及夹取工件之后的夹取位置;根据所述夹取精度以及夹取位置修正所述预设算法。
9.较佳地,所述第二摄像头与所述传送带位置关系固定,所述传送带的上边缘和下边缘分别设有一识别点,所述摄像头为二维摄像头,所述机器人控制方法包括:所述处理装置识别停留时传送工件的影像中的识别点的影像位置及传送工件上三个目标点的影像位置;根据目标点与两个识别点的影像位置的关系、传送工件目标点的实际离地高度、识别点相对于第二摄像头的空间坐标获取三个目标点相对于第二摄像头的空间坐标;根据三个目标点相对于第二摄像头的空间坐标以及第二摄像头与机器人的固定位置关系获取传送工件在取件区域时相对于机器人的空间坐标;所述处理装置根据相对于机器人的空间坐标获取传送工件的正面法向量,并控制机器人沿所述正面法向量所在直线夹取所述传送工件。
10.较佳地,所述摄像装置包括两颗摄像头,第一摄像头的拍摄区域覆盖所述传送带上机器人的取件区域,第二摄像头的拍摄区域覆盖传送带上所述取件区域之前的工件摆放区域,所述摄像头为三维摄像头,所述机器人控制方法包括:所述处理装置根据传送带停留时传送工件的影像获取传送带三维点云和传送工件三维点云;所述处理装置识别传送带三维点云中的传送带边缘特征点以获取两条传送带边缘直线,所述处理装置还识别传送工件三维点云的特征点以获取传送工件相对于第二摄像头的空间坐标;根据正面法向量、传送带边缘直线、取件区域之前的工件摆放区域到取件区域的距离以及第二摄像头与机器人的固定位置关系获取传送工件在取件区域时相对于机器人
的空间坐标;所述处理装置根据相对于机器人的空间坐标获取传送工件的正面法向量,并控制机器人沿所述正面法向量所在直线夹取所述传送工件。
11.较佳地,所述处理装置为plc,所述生产线还包括光电开关以及显示模块,所述光电开关用于检测工件是否到位,所述光电开关、机器人以及所述显示模块均与所述plc电连接。
12.本发明还提供一种生产线,所述生产线包括机器人以及数控机床,其特征在于,所述生产线通过如上所述的机器人控制方法控制机器人运行。
13.本发明又提供一种数控机床,其特征在于,所述数控机床用于如上所述的生产线。
14.符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
15.本发明的积极进步效果在于:本发明能够降低人工对生产线的干预,提高生产效率,减少生产事故,同时提高生产线中各设备的兼容性,为混线生产提供条件。
16.本发明通过扫码输出工件的类型码,plc根据类型码匹配对应的夹具,并调用对应的机器人换夹具程序,提高少批量多产品加工过程中的效率,减少人工干预。
附图说明
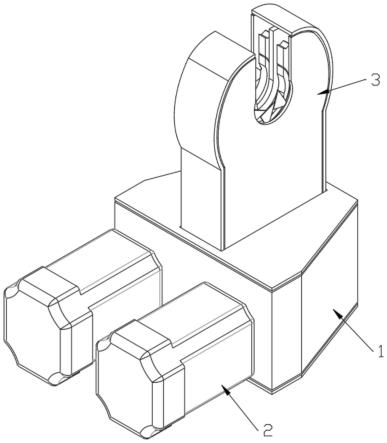
17.图1为本发明实施例1的生产线的结构示意图。
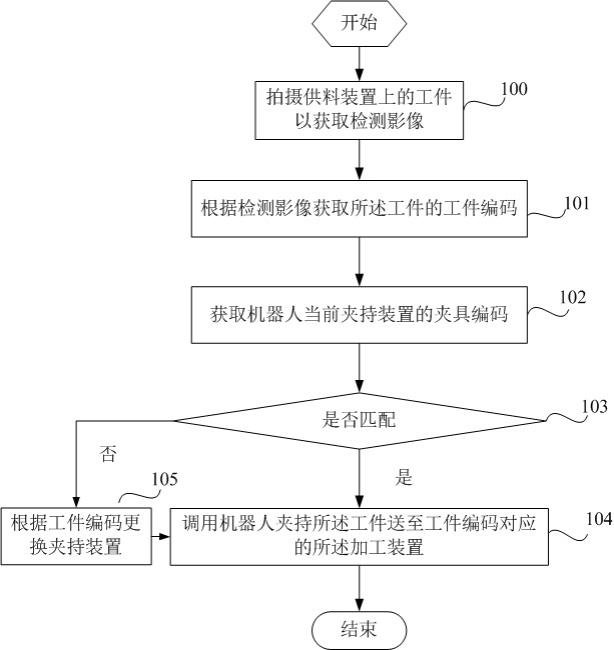
18.图2为本发明实施例1的机器人控制方法的流程图。
具体实施方式
19.下面通过实施例的方式进一步说明本发明,但并不因此将本发明限制在所述的实施例范围之中。
20.实施例1本实施例提供一种生产线,所述生产线包括处理装置、一机器人、一供料装置、摄像装置以及若干加工装置,本实施例中所述加工装置为数控机床。
21.所述机器人包括一夹持装置。
22.所述摄像装置用于拍摄供料装置上的工件以获取检测影像;所述处理装置用于根据检测影像获取所述工件的工件编码;所述处理装置用于获取机器人当前夹持装置的夹具编码;所述处理装置用于判断当前时刻夹具编码与工件编码是否匹配,若是则调用机器人夹持所述工件送至工件编码对应的所述加工装置,若否则根据工件编码更换夹持装置。
23.具体地,所述供料装置包括一料仓,每一工件上设有一识别码。
24.所述料仓用于将工件以预设姿态摆放;所述处理装置用于识别所述检测影像中的识别码以获取所述工件的工件编码,所述工件编码包括二维码和条形码。
25.进一步地,所述供料装置包括一传送带。
26.所述处理装置用于识别检测影像中工件的特征点;
所述处理装置用于根据工件的特征点获取传送带上工件的摆放姿态以及工件编码;所述处理装置用于判断当前时刻夹具编码与工件编码是否匹配,若是调用机器人按照摆放姿态对应的夹持方向夹持所述工件送至工件编码对应的所述加工装置。
27.进一步地,所述摄像装置包括两颗摄像头,第一摄像头的拍摄区域覆盖所述传送带上机器人的取件区域,第二摄像头的拍摄区域覆盖传送带上所述取件区域之前的工件摆放区域,区间趋于之前是指工件排队传送向所述取件区域的区域,也就是等待被取件的区域。
28.所述第一摄像头用于在机器人取件时拍摄机器人取件影像以获取若干取件影像;第二摄像头用于在机器人取件时拍摄传送带停留时传送工件的影像;所述处理装置用于识别传送工件的影像中工件及传送带的特征点,并根据所述工件及传送带的特征点获取传送工件在传送带上的位置坐标以及传送工件摆放方向作为传送工件的姿态数据;所述处理装置用于根据第二摄像头与传送带的固定位置关系、取件区域之前的工件摆放区域到取件区域的距离、传送工件的姿态数据以及预设算法推算出传送工件在取件区域时的摆放姿态;所述处理装置用于根据推算出的传送工件摆放姿态以及工件编码判断传送工件在取件区域时的夹具编码与工件编码是否匹配,若否则在夹具库中调用传送工件对应的夹具做更换夹具准备;所述处理装置用于根据推算出的传送工件摆放姿态控制所述机器人夹取位于取件区域的传送工件。
29.具体地,所述机器人及夹具上设有识别标记。
30.所述处理装置用于识别所述若干取件影像上的工件的特征点以及所述识别标记;所述处理装置用于根据特征点及识别标记获取机器人夹取工件之前的夹取精度以及夹取工件之后的夹取位置;所述处理装置用于根据所述夹取精度以及夹取位置修正所述预设算法。
31.进一步地,所述第二摄像头与所述传送带位置关系固定,所述传送带的上边缘和下边缘分别设有一识别点,所述摄像头为二维摄像头。
32.所述处理装置用于识别停留时传送工件的影像中的识别点的影像位置及传送工件上三个目标点的影像位置;所述处理装置用于根据目标点与两个识别点的影像位置的关系、传送工件目标点的实际离地高度、识别点相对于第二摄像头的空间坐标获取三个目标点相对于第二摄像头的空间坐标;所述处理装置用于根据三个目标点相对于第二摄像头的空间坐标以及第二摄像头与机器人的固定位置关系获取传送工件在取件区域时相对于机器人的空间坐标;所述处理装置用于根据相对于机器人的空间坐标获取传送工件的正面法向量,并控制机器人沿所述正面法向量所在直线夹取所述传送工件。
33.参见图1,由于摄像头11与传送带12的位置固定,前期通过标定可以获取第二摄像头11拍摄影像中识别点13相对于第二摄像头的空间坐标。利用识别点在二维影像中的位置
以及空间坐标,能够获取工件14特征点16与第二摄像头摄像中心的向量,再利用预存的工件特征点高度15就能够唯一的确认工件特征点相对于第二摄像头的空间坐标。
34.具体地,所述处理装置为plc,所述生产线还包括光电开关以及显示模块,所述光电开关用于检测工件是否到位,所述光电开关、机器人以及所述显示模块均与所述plc电连接。
35.参见图2,利用上述生产线,本实施例还提供一种机器人控制方法,包括:步骤100、所述摄像装置拍摄供料装置上的工件以获取检测影像。
36.步骤101、所述处理装置根据检测影像获取所述工件的工件编码。
37.步骤102、获取机器人当前夹持装置的夹具编码。
38.步骤103、判断当前时刻夹具编码与工件编码是否匹配,若是则执行步骤104,若否则执行步骤105。
39.步骤104、调用机器人夹持所述工件送至工件编码对应的所述加工装置。
40.步骤105、根据工件编码更换夹持装置,然后执行步骤104。
41.所述供料装置包括一料仓,每一工件上设有一识别码,步骤100之前包括:所述料仓将工件以预设姿态摆放;步骤101具体为:所述处理装置识别所述检测影像中的识别码以获取所述工件的工件编码,所述工件编码包括二维码和条形码。
42.所述供料装置包括一传送带,步骤103具体包括:所述处理装置识别检测影像中工件的特征点;根据工件的特征点获取传送带上工件的摆放姿态以及工件编码;处理装置判断当前时刻夹具编码与工件编码是否匹配,若是调用机器人按照摆放姿态对应的夹持方向夹持所述工件送至工件编码对应的所述加工装置。
43.进一步地,所述摄像装置包括两颗摄像头,第一摄像头的拍摄区域覆盖所述传送带上机器人的取件区域,第二摄像头的拍摄区域覆盖传送带上所述取件区域之前的工件摆放区域,步骤104之后具体包括:所述第一摄像头在机器人取件时拍摄机器人取件影像以获取若干取件影像,第二摄像头在机器人取件时拍摄传送带停留时传送工件的影像;所述处理装置识别传送工件的影像中工件及传送带的特征点,并根据所述工件及传送带的特征点获取传送工件在传送带上的位置坐标以及传送工件摆放方向作为传送工件的姿态数据;所述处理装置根据第二摄像头与传送带的固定位置关系、取件区域之前的工件摆放区域到取件区域的距离、传送工件的姿态数据以及预设算法推算出传送工件在取件区域时的摆放姿态;所述处理装置根据推算出的传送工件摆放姿态以及工件编码判断传送工件在取件区域时的夹具编码与工件编码是否匹配,若否则在夹具库中调用传送工件对应的夹具做更换夹具准备;所述处理装置根据推算出的传送工件摆放姿态控制所述机器人夹取位于取件区域的传送工件。
44.进一步地,所述机器人及夹具上设有识别标记,所述机器人控制方法包括:
所述处理装置识别所述若干取件影像上的工件的特征点以及所述识别标记;根据特征点及识别标记获取机器人夹取工件之前的夹取精度以及夹取工件之后的夹取位置;根据所述夹取精度以及夹取位置修正所述预设算法。
45.具体地,所述第二摄像头与所述传送带位置关系固定,所述传送带的上边缘和下边缘分别设有一识别点,所述摄像头为二维摄像头,所述机器人控制方法包括:所述处理装置识别停留时传送工件的影像中的识别点的影像位置及传送工件上三个目标点的影像位置;根据目标点与两个识别点的影像位置的关系、传送工件目标点的实际离地高度、识别点相对于第二摄像头的空间坐标获取三个目标点相对于第二摄像头的空间坐标;根据三个目标点相对于第二摄像头的空间坐标以及第二摄像头与机器人的固定位置关系获取传送工件在取件区域时相对于机器人的空间坐标;所述处理装置根据相对于机器人的空间坐标获取传送工件的正面法向量,并控制机器人沿所述正面法向量所在直线夹取所述传送工件。
46.实施例2本实施例与实施例1基本相同,不同之处仅在于:所述摄像装置包括两颗摄像头,第一摄像头的拍摄区域覆盖所述传送带上机器人的取件区域,第二摄像头的拍摄区域覆盖传送带上所述取件区域之前的工件摆放区域,所述摄像头为三维摄像头。
47.所述处理装置用于根据传送带停留时传送工件的影像获取传送带三维点云和传送工件三维点云;所述处理装置用于识别传送带三维点云中的传送带边缘特征点以获取两条传送带边缘直线,所述处理装置还识别传送工件三维点云的特征点以获取传送工件相对于第二摄像头的空间坐标;所述处理装置用于根据正面法向量、传送带边缘直线、取件区域之前的工件摆放区域到取件区域的距离以及第二摄像头与机器人的固定位置关系获取传送工件在取件区域时相对于机器人的空间坐标;所述处理装置用于根据相对于机器人的空间坐标获取传送工件的正面法向量,并控制机器人沿所述正面法向量所在直线夹取所述传送工件。
48.相应地,利用上述生产线,本实施例提供一种机器人控制方法,包括:所述处理装置根据传送带停留时传送工件的影像获取传送带三维点云和传送工件三维点云;所述处理装置识别传送带三维点云中的传送带边缘特征点以获取两条传送带边缘直线,所述处理装置还识别传送工件三维点云的特征点以获取传送工件相对于第二摄像头的空间坐标;根据正面法向量、传送带边缘直线、取件区域之前的工件摆放区域到取件区域的距离以及第二摄像头与机器人的固定位置关系获取传送工件在取件区域时相对于机器人的空间坐标;所述处理装置根据相对于机器人的空间坐标获取传送工件的正面法向量,并控制
机器人沿所述正面法向量所在直线夹取所述传送工件。
49.实施例2用于在二维摄像头的镜头被遮挡时,由于车间环境容易使二维摄像头的镜头变脏,处理装置判断影像的清晰度是否满足预设条件,若否则通知操作人员擦拭镜头并利用实施例2继续工作以保证当前生产计划。
50.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。