1.本发明涉及汽车维修技术领域,尤其涉及一种瞳式扳手。
背景技术:
2.汽车行业前桥悬挂前轮定位的六角形螺母/螺杆通常需要进行松紧调节。调节的目的让车辆沿直线行走,转向时方向回正。
3.目前市面上的调节方式为:
4.1、人工调节,人手拿着固定尺寸扳手进行调节螺母/螺杆,调节规格不同的螺母/螺杆时,需要更换相对应规格的扳手。
5.2、设备调节,设备由机器人和拧紧轴两部分组成,机器人沿固定的轨迹将固定尺寸的打紧轴扳手套入螺母/螺杆的位置进行调节,调节规格不同的螺母/螺杆时,需要更换扳手。
6.这两种调节方式在对不同规格的螺母/螺杆进行调节时需要进行扳手尺寸的更换,需要消耗大量的时间,减低了调节的效率。
技术实现要素:
7.本发明的目的是为了解决现有技术中对不同规格的螺母/螺杆进行调节时需要进行扳手尺寸的更换,需要消耗大量的时间,减低了调节的效率的缺点,而提出的一种瞳式扳手。
8.为了实现上述目的,本发明采用了如下技术方案:
9.一种瞳式扳手,包括安装壳,所述安装壳为梯形壳,所述安装壳长底边面对称固定连接有两个伺服电机,所述安装壳内部为安装空间,所述伺服电机输出端位于安装空间内部;
10.所述安装壳的梯形面中部垂直固定连接有扳手壳,所述扳手壳与安装壳连接端为矩形,且外端为圆形,所述扳手壳的圆形端架设有卡口,所述安装壳和扳手壳中间固定安装有隔板,所述隔板将安装壳和扳手壳分隔为上下对称的两个操作空间,上下两个所述操作空间内部对称设置有夹紧组件和松紧组件,且通过传动组件连接伺服电机和夹紧组件与松紧组件;
11.所述夹紧组件包括第一转动片、夹紧槽、夹片和连接轴,所述第一转动片通过联动组件与传动组件连接,所述第一转动片为有缺口的环形,且设置在卡口位置,多个所述夹紧槽环状开设在第一转动片上,所述夹紧槽为弧形条槽,所述连接轴垂直固定连接在夹片上,且滑动设置在弧形条槽内部,所述夹片为三角形片,且环状设置,多个所述夹片相互接触;
12.所述松紧组件设置子另一操作空间中,用于转动夹件。
13.优选的,两套所述传动组件对称设置在隔板两侧,且分别与两个伺服电机连接,所述传动组件包括锥齿轮、锥齿盘、转轴、第一齿轮、第二齿轮和第三齿轮,所述锥齿轮固定连接在伺服电机的输出端,所述隔板两侧对称固定连接有安装板,所述转轴垂直转动固定连
接在安装板上,所述锥齿盘固定连接在转轴远离隔板的一端,且与锥齿轮啮合连接,所述第一齿轮固定连接在转轴另一端,所述第二齿轮转动连接在隔板靠近卡口的一侧,且与第一齿轮啮合连接,两个所述第三齿轮转动连接在隔板上,且位于第二齿轮靠近卡口的一侧,两个所述第三齿轮对称设置,且分别与第二齿轮啮合连接。
14.优选的,所述松紧组件包括第二转动片、松紧槽、松紧片和连接轴,所述第二转动片为有缺口的环形,且与第一转动片对称设置,多个所述松紧槽环状开设在第二转动片上,所述夹紧槽为条形槽,所述连接轴垂直固定连接在松紧上,且滑动设置在条形槽内部,所述松紧片为三角形片,且环状设置,多个所述松紧片相互接触。
15.优选的,所述联动组件包括环齿、轴向定位轴承和径向定位轴承,所述环齿为缺口环,且缺口与卡口重合,所述环齿与转动片转动连接,所述环齿靠近转齿片的一侧设有弧槽,一个所述轴向定位轴承和一个径向定位轴承组成一个偏转轴组,多个所述偏转轴组环状设置在弧槽内部。
16.优选的,所述连接轴底端与轴向定位轴承上端固定连接,所述连接轴由弹性材质制成。
17.优选的,所述第三齿轮的直径小于第二齿轮和第一齿轮,所述第三齿轮一侧与第二齿轮啮合连接,且另一侧与环齿侧边啮合连接。
18.与现有技术相比,本发明的有益效果是:
19.1、在调节过程中,当夹紧组件连接的伺服电机工作时,联动组件进行转动,连接轴沿着夹紧槽槽轨迹滑动,从而夹紧螺母/螺杆,在通过松紧组件对固定位置的螺母/螺杆进行调节转动,本发明的瞳式扳手,适用于13-23.5mm规格的螺母/螺杆,进行松紧调节,不需要更换扳手或夹具,提高了调节的工作效率;
20.2、视觉系统和机器人配合,能将瞳式扳手精准送到位。用瞳式扳手能节省人工成本,提高生产效率及质量。
附图说明
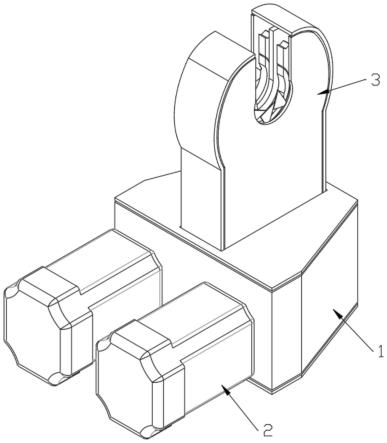
21.图1为本发明提出的一种瞳式扳手的正面结构示意图;
22.图2为本发明提出的一种瞳式扳手的侧面结构示意图;
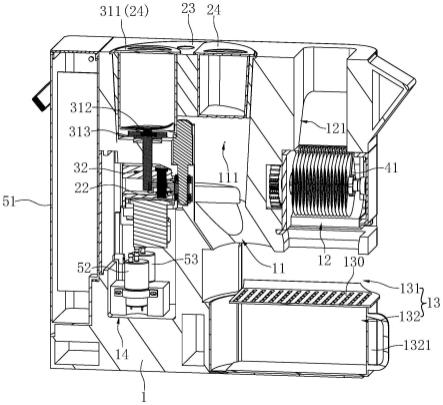
23.图3为本发明提出的一种瞳式扳手的内部结构示意图;
24.图4为本发明提出的一种瞳式扳手的传动组件结构示意图;
25.图5为本发明提出的一种瞳式扳手的松紧组件面结构示意图;
26.图6为本发明提出的一种瞳式扳手的夹紧组件结构示意图。
27.图中:1安装壳、2伺服电机、3扳手壳、4隔板、5夹紧组件、51第一转动片、52夹紧槽、53夹片、6松紧组件、61第二转动片、62松紧槽、63松紧片、8传动组件、81锥齿轮、82锥齿盘、83转轴、84第一齿轮、85第二齿轮、86第三齿轮、9联动组件、91环齿、92轴向定位轴承、93径向定位轴承。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
29.本发明中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
30.参照图1-6,一种瞳式扳手,包括安装壳1,安装壳1为梯形壳,安装壳1长底边面对称固定连接有两个伺服电机2,安装壳1内部为安装空间,伺服电机2输出端位于安装空间内部;
31.安装壳1的梯形面中部垂直固定连接有扳手壳3,扳手壳3与安装壳1连接端为矩形,且外端为圆形,扳手壳3的圆形端架设有卡口,安装壳1和扳手壳3中间固定安装有隔板4,隔板4将安装壳1和扳手壳3分隔为上下对称的两个操作空间,上下两个操作空间内部对称设置有夹紧组件5和松紧组件6,且通过传动组件8连接伺服电机2和夹紧组件5与松紧组件6;
32.夹紧组件5包括第一转动片51、夹紧槽52、夹片53和连接轴,第一转动片51通过联动组件9与传动组件8连接,第一转动片51为有缺口的环形,且设置在卡口位置,多个夹紧槽52环状开设在第一转动片51上,夹紧槽52为弧形条槽,连接轴垂直固定连接在夹片53上,且滑动设置在弧形条槽内部,夹片53为三角形片,且环状设置,多个夹片53相互接触;
33.松紧组件6设置子另一操作空间中,用于转动夹件。
34.应用上述技术方案的实施例中,人工将汽车开到四轮定位设备位置,四轮定位设备将汽车顶起开始测试,瞳式扳手实时根据四轮定位测试数据调节螺杆的位置,调节到合格数据后,瞳式扳手将螺母拧紧,机器人及瞳式扳手退回到起始位,等待下一辆车的到来,在调节过程中,当夹紧组件5连接的伺服电机2工作时,联动组件9进行转动,连接轴沿着夹紧槽52槽轨迹滑动,从而夹紧螺母/螺杆,在通过松紧组件6对固定位置的螺母/螺杆进行调节转动,本发明的瞳式扳手,适用于13-23.5mm规格的螺母/螺杆,进行松紧调节,不需要更换扳手或夹具。视觉系统和机器人配合,能将瞳式扳手精准送到位,用瞳式扳手能节省人工成本,提高生产效率及质量。
35.本实施例中优选的技术方案,两套传动组件8对称设置在隔板4两侧,且分别与两个伺服电机2连接,传动组件8包括锥齿轮81、锥齿盘82、转轴83、第一齿轮84、第二齿轮85和第三齿轮86,锥齿轮81固定连接在伺服电机2的输出端,隔板4两侧对称固定连接有安装板,转轴83垂直转动固定连接在安装板上,锥齿盘82固定连接在转轴83远离隔板4的一端,且与锥齿轮81啮合连接,第一齿轮84固定连接在转轴83另一端,第二齿轮85转动连接在隔板4靠近卡口的一侧,且与第一齿轮84啮合连接,两个第三齿轮86转动连接在隔板4上,且位于第二齿轮85靠近卡口的一侧,两个第三齿轮86对称设置,且分别与第二齿轮85啮合连接,在传动过程中,夹紧组件5和松紧组件6是通过两套传动组件8分别进行连接调节的,在使用过程中伺服电机2进行转动,从而带动锥齿轮81、锥齿盘82、转轴83、第一齿轮84、第二齿轮85和第三齿轮86进行一系列的啮合转动,从而对位于扳手壳3端部的夹紧组件5和松紧组件6进行调节;
36.松紧组件6包括第二转动片61、松紧槽62、松紧片63和连接轴,第二转动片61为有缺口的环形,且与第一转动片51对称设置,多个松紧槽62环状开设在第二转动片61上,夹紧槽52为条形槽,连接轴垂直固定连接在松紧片63上,且滑动设置在条形槽内部,松紧片63为三角形片,且环状设置,多个松紧片63相互接触,松紧组件6初始为固定状态,当夹紧组件5
的伺服电机2夹紧螺母/螺杆,扭矩达到设定值时,松紧组件6连接的伺服电机2与夹紧组件5连接的伺服电机2同步工作,顺时针旋转将螺母/螺杆拧紧,达到设定扭矩设定值时,逆时针旋转松开螺母/螺杆,退出汽车前桥悬挂位置,返回起始位;
37.联动组件9包括环齿91、轴向定位轴承92和径向定位轴承93,环齿91为缺口环,且缺口与卡口重合,环齿91与转动片转动连接,环齿91靠近转齿片的一侧设有弧槽,一个轴向定位轴承92和一个径向定位轴承93组成一个偏转轴83组,多个偏转轴83组环状设置在弧槽内部,在对连接轴位置的调节时,通过环齿91与转动片61进行相对的转动,从而带动内部的轴向定位轴承92个径向定位轴承93进行转动;
38.连接轴底端与轴向定位轴承92上端固定连接,连接轴由弹性材质制成,弹性的连接轴方便在夹紧槽52和松紧槽62内部进行滑动;
39.第三齿轮86的直径小于第二齿轮85和第一齿轮84,第三齿轮86一侧与第二齿轮85啮合连接,且另一侧与环齿91侧边啮合连接,为了保证传动效果,通知提高传动的灵敏度,通过两个第三齿轮86进行连接,保证传动。
40.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。