1.本发明属于工业机器人技术领域,具体涉及一种全密封大负载关节结构、关节结构安装方法及机器人。
背景技术:
2.随着工业机器人技术的发展,市场对工业机器人的需求逐步由能用就行变成了需具备高速、高刚度、高精度等特点,而制约机器人的速度、刚度和精度的重要因素之一就是机器人的关节。简化传动链,提高传动刚度是机器人关节的发展方向。要简化传动链,提高传动刚度,从技术路线角度来说,协作机器人的一体化关节路线是最为合适的:电机和减速机输入轴之间为固连,没有传动环节;谐波减速机为一级减速机,相比rv减速机减少了1-2级减速机构;但是,目前协作机器人的一体化关节都面临负载能力不足、刚度不足、精度相对较差、噪音大、传动效率低和抗冲击能力差等问题。
技术实现要素:
3.为了解决上述技术问题,本发明提供一种全密封大负载关节结构、关节结构安装方法及机器人。
4.本发明是这样实现的,提供一种全密封大负载关节结构,包括减速机、电机、轴承、抱闸、编码器和外壳,减速机的输入轴的两端均伸出减速机本体之外,电机包括电机转子和电机定子,电机转子固定连接在减速机输入轴的输入侧上,外壳为筒型结构,电机定子固定连接在外壳内壁,且电机定子套接在电机转子的外侧,外壳远离减速机的一侧开设有安装孔,安装孔的侧壁向外壳内部延伸一段距离,电机转子远离减速机的一端为转子轴,转子轴伸入到安装孔内,在转子轴上固定套接轴承,轴承远离减速机的一侧、且位于安装孔与转子轴之间设有第一密封圈,编码器包括编码器转子和编码器定子,第一密封圈远离轴承一侧的转子轴上固定设有编码器转子,编码器定子固定设置在安装孔的内壁上,且编码器转子和编码器定子同轴,抱闸包括抱闸主体和抱闸转子,抱闸转子固定连接在电机转子的转子轴上,抱闸主体固定在外壳远离减速机的一侧、且位于抱闸转子的外侧。
5.优选的,所述电机转子和所述电机定子靠近所述减速机的一端齐平,且位于所述外壳的内侧,减速机伸入到外壳内与外壳固定连接。
6.进一步优选,在所述外壳内壁和所述减速机之间,设有第二密封圈。
7.进一步优选,所述减速机为rv减速机,减速机的所述输入轴输入侧伸出减速机的长度大于输出侧伸出减速机的长度,在输出侧的输入轴上,设有螺纹孔。
8.进一步优选,所述第一密封圈为唇形密封圈,在第一密封圈与所述轴承之间,设有隔垫,轴承为深沟球轴承。
9.进一步优选,在所述外壳的所述安装孔内壁,设有编码器定子安装架,所述编码器定子设置在编码器定子安装架上。
10.本发明还提供上述全密封大负载关节结构的安装方法,包括如下步骤:
11.1)将所述减速机整体冷却到-80℃,将所述电机转子加热到180℃,待温度稳定后,将电机转子通过压力机安装到减速机的所述输入轴上,待减速机与电机转子温度与室温相同,完成固定连接;
12.2)将所述外壳加热到150℃,所述电机定子保持室温,待外壳温度稳定,将电机定子通过压力机安装到外壳内侧,待均降至室温后,电机定子与外壳完成固定连接;
13.3)将步骤1)装配完成的减速机-电机转子组件插入到外壳-电机定子组件中,将减速机与外壳固定连接,电机转子和电机定子之间处于同轴状态;
14.4)将所述轴承套设到电子转子的转子轴上,轴承内圈固定到转子轴上,轴承外圈与外壳的所述安装孔壁配合;
15.5)将所述第一密封圈安装到电机转子的转子轴上,此时,减速机、外壳、第一密封圈和电机转子之间形成密封腔;
16.6)将所述编码器转子固定到电机转子的转子轴上;
17.7)将所述编码器定子固定到外壳上,此时,编码器定子和编码器转子处于同轴状态并且可以相对转动;
18.8)将所述抱闸主体安装在外壳上,所述抱闸转子与电机转子的转子轴固定连接;
19.9)将步骤5)中所述的密封腔内注满润滑油,至此装配完毕。
20.本发明还提供一种机器人,在关节处设有上述的全密封大负载关节结构。
21.与现有技术相比,本发明的优点在于:
22.1、本发明采用rv减速机,负载能力、刚度、精度、抗冲击性等性能都比谐波减速机、行星减速机高。rv减速机的最大输出力矩可达4000nm,远超谐波减速机,与减速机配套使用的电机功率最大可达6kw以上;
23.2、电机的转子在安装时通过过盈方式与减速机输入轴连接,一方面可降低加工制造难度,降低成本,另一方面也可以降低常规螺钉连接所带来的精度损失,特别是转轴的圆周跳动和同轴度;
24.3、减速机与电机所处的区域为油脂润滑区域,正常运转时,油脂会浸泡减速机内部的传动部件和电机的定子转子,在高速、高扭矩输出的工况下,一方面可以保证减速机良好的润滑条件,另一方面可以为无框电机、减速机提供一个良好的散热环境,让整个系统的温度更加均衡,不会出现局部温度过热的情况;
25.4、减速机的输入轴在输出动力侧预留有抱闸安装接口,同时在电机转子远离减速机侧也预留有抱闸安装接口,在实际使用中可根据实际情况进行合理布置,结构灵活性更高。
附图说明
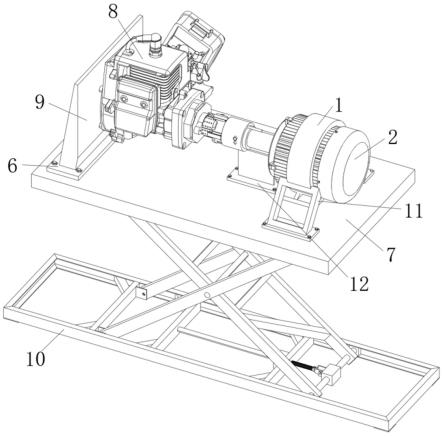
26.图1为本发明提供的关节结构整体立体图;
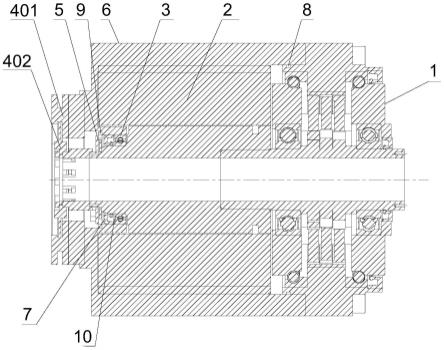
27.图2为本发明提供的关节结构整体剖视图;
28.图3为减速机立体图;
29.图4为减速机剖视图;
30.图5为电机转子立体图;
31.图6为电机转子剖视图;
32.图7为电机定子立体图;
33.图8为电机定子剖视图;
34.图9为外壳立体图;
35.图10为外壳剖视图;
36.图11为轴承立体图;
37.图12为第一密封圈结构图;
38.图13为编码器定子安装架;
39.图14为编码器定子和编码器转子的连接结构图;
40.图15为抱闸主体立体图;
41.图16为隔垫立体图;
42.图17为设有本发明提供的关节结构的机器人。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.实施例1、
45.参考图1-图16,本实施例提供一种全密封大负载关节结构,包括减速机1、电机2、轴承3、抱闸4、编码器5和外壳6,减速机1的输入轴101的两端均伸出减速机1本体之外,电机2包括电机转子201和电机定子202,电机转子201固定连接在减速机1输入轴101的输入侧上,外壳6为筒型结构,电机定子202固定连接在外壳6内壁,且电机定子202套接在电机转子201的外侧,外壳6远离减速机1的一侧开设有安装孔601,安装孔601的侧壁向外壳6内部延伸一段距离,电机转子201远离减速机1的一端为转子轴,转子轴伸入到安装孔601内,在转子轴上固定套接轴承3,轴承3远离减速机1的一侧、且位于安装孔601与转子轴之间设有第一密封圈7,编码器5包括编码器转子501和编码器定子502,第一密封圈7远离轴承3一侧的转子轴上固定设有编码器转子501,编码器定子502固定设置在安装孔601的内壁上,且编码器转子501和编码器定子502同轴,抱闸4包括抱闸主体401和抱闸转子402,抱闸转子402固定连接在电机转子201的转子轴上,抱闸主体401固定在外壳6远离减速机1的一侧、且位于抱闸转子402的外侧。
46.安装本实施例提供的全密封大负载关节结构包括如下步骤:
47.1)将所述减速机1整体冷却到-80℃,将所述电机转子201加热到180℃,待温度稳定后,将电机转子201通过压力机安装到减速机1的所述输入轴101上,待减速机1与电机转子201温度与室温相同,完成固定连接,以最大程度的减少电机转子201和减速机1的输入轴101之间的同轴度损失;
48.2)将所述外壳6加热到150℃,所述电机定子202保持室温,待外壳6温度稳定,将电机定子202通过压力机安装到外壳6内侧,待均降至室温后,电机定子202与外壳6完成固定连接,以最大限度的减少装配后电机定子202与电机转子201之间的同轴度损失;
49.3)将步骤1)装配完成的减速机-电机转子组件插入到步骤2)装配完成的外壳-电
机定子组件中,将减速机1与外壳6固定连接,可选用螺钉固定,电机转子201和电机定子202之间处于同轴状态;
50.4)将所述轴承3套设到电子转子201的转子轴上,轴承3内圈固定到转子轴上,轴承3外圈与外壳6的所述安装孔壁配合;
51.5)将所述第一密封圈7安装到电机转子201的转子轴上,此时,减速机1、外壳6、第一密封圈7和电机转子201之间形成密封腔;
52.6)将所述编码器转子501固定到电机转子201的转子轴上,可通过胶水或螺钉固定连接;
53.7)将所述编码器定子502固定到外壳6上,此时,编码器定子502和编码器转子501处于同轴状态并且可以相对转动;
54.8)将所述抱闸主体401安装在外壳6上,所述抱闸转子402与电机转子201的转子轴固定连接;
55.9)将步骤5)中所述的密封腔内注满润滑油,至此装配完毕。
56.本实施例提供的全密封大负载关节结构工作过程如下:操作人员下发上电信号给控制器
→
控制器将操作人员的上电信号发送到驱动器(控制器和驱动器是外接的一个装置,在本发明中未体现)
→
驱动器给抱闸主体401内部电磁铁线圈通电
→
电磁铁克服抱闸内部弹簧的弹力将衔铁松开
→
电机转子402被释放
→
操作人员下发运动信号
→
控制器将操作人员的运动信号发送到驱动器
→
驱动器下发电机运动信号给电机定子202
→
电机定子202接收运动信号,与电机转子201配合输出转矩
→
减速机1将电机2通过输入轴101输入的转矩放大后输出。
57.为了方便连接外壳6和减速机1,所述电机转子201和所述电机定子202靠近所述减速机1的一端齐平,且位于所述外壳6的内侧,减速机1伸入到外壳6内与外壳6固定连接。
58.为了强化密封,在所述外壳6内壁和所述减速机1之间,设有第二密封圈8。
59.为了提高负载能力、刚度、精度、抗冲击性等,选用的所述减速机1为rv减速机,为了方便连接以及灵活使用,减速机1的所述输入轴101输入侧伸出减速机1的长度大于输出侧伸出减速机1的长度,在输出侧的输入轴101上,设有螺纹孔。
60.为了防止第一密封圈7与轴承3之间的摩擦和磕碰,所述第一密封圈7为唇形密封圈,在第一密封圈7与所述轴承3之间,设有隔垫10,轴承3为深沟球轴承。
61.为了方便连接编码器定子502,在所述外壳6的所述安装孔内壁,设有编码器定子安装架9,所述编码器定子502设置在编码器定子安装架9上。
62.实施例2、
63.本实施例提供一种机器人,参考图17,在关节处设有实施例1所述的全密封大负载关节结构。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。