1.本实用新型涉及机械加工技术领域,尤其涉及一种机械加工中心用自动切割机。
背景技术:
2.机械加工是指通过一种机械设备对工件的外形尺寸或性能进行改变的过程,按加工方式上的差别可分为切削加工和压力加工,其中,切割机是机械加工当中常用设备之一。
3.但是,现有的机械加工用切割机在使用时存在一下问题:
4.(1)在加工时需要人工进行填加物料,影响工作效率;
5.(2)在加工时无法根据工件的大小进行夹持固定;
6.(3)在加工时会产生极大灰尘,如果不及时处理会对工作环境造成破坏。
7.因此我们需要设计一个新型的机械加工中心用自动切割机。
技术实现要素:
8.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种机械加工中心用自动切割机。
9.为了实现上述目的,本实用新型采用了如下技术方案:
10.一种机械加工中心用自动切割机,包括安装机构、夹持机构、感应机构和切割机构;
11.安装机构:所述安装机构包括工作台和工作台顶部外壁中部开有加工槽,且工作台两侧内壁底部均安装有输送组件;
12.夹持机构:包括焊接于工作台顶部外壁等距离分布的凹槽板和凹槽板内壁滑动连接有滑动板,且滑动板一侧外壁焊接有夹持板,滑动板顶部一侧外壁通过螺栓连接有固定块;
13.感应机构:包括焊接于工作台顶部一侧外壁的支撑架和支撑架底部外壁中部开有第三滑槽,且支撑架一侧外壁通过螺栓连接有电动伸缩杆;
14.切割机构:包括通过螺栓固定于工作台一侧外壁的第一伺服电机和第一伺服电机的输出轴通过转动杆连接有丝杆,且丝杆外壁螺接有连接块。
15.优选的,所述加工槽相对一侧内壁上部开有第一滑槽,且加工槽相对一侧内壁下部开有第二滑槽,工作台底部开有加工槽外壁焊接有防护罩,且防护罩底部外壁通过连接管连接有收集箱,收集箱一侧外壁通过连接管连接有吸尘器。
16.优选的,所述电动伸缩杆杆身一侧外壁通过螺栓固定有第一滑块,且第一滑块底部外壁通过螺栓连接有红外线传感器,第一滑块外壁与第三滑槽内壁滑动连接。
17.优选的,所述连接块两侧外壁底部均焊接有第二滑块,且连接块一侧外壁顶部通过转动孔转动连接有转动轴,转动轴一侧外壁连接有第二伺服电机,且转动轴另一侧外壁固定有切割片,第二伺服电机外壁安装有电机罩。
18.优选的,所述第二滑块外壁与第二滑槽内壁滑动连接,且电机罩外壁与第一滑槽
内壁滑动连接。
19.优选的,所述红外线传感器通过信号线连接有控制器,且控制器通过信号线与输送组件、第一伺服电机和第二伺服电机相连接。
20.优选的,所述输送组件包括通过轴承安装于工作台内壁两端上的滚筒、固定于工作台外壁上的传送电机和套接于两个滚筒上的传送皮带,传送电机输出轴与一个滚筒连接,传送皮带为网格状结构。
21.本实用新型的有益效果为:
22.1、本设计的机械加工中心用自动切割机,通过设置的红外线传感器可以在加工时利用电动伸缩杆的伸缩功能调节红外线传感器的位置,从而可以对切割的长度进行控制,同时可以在利用红外线传感器的感应功能传递信号给控制器,利用控制器控制第一伺服电机和第二伺服电机对工件进行切割,并且在切割后控制输送组件进行自动输送,这样的连接方式可以使用时实现切割机的自动切割;
23.2、本设计的机械加工中心用自动切割机,通过设置的夹持机构,利用滑动板与凹槽板的滑动连接,并且通过固定块利用螺栓滑动板相连接进行固定,可以在加工时根据工件的大小进行调节加持固定;
24.3、本设计的机械加工中心用自动切割机,通过设置的吸尘器和收集箱,可以在切割加工时利用吸尘器的吸附功能将产生的灰尘吸入到收集箱内进行收集,这样可以在加工时防止灰尘对周围环境造成破坏。
附图说明
25.图1为本实用新型提出的一种机械加工中心用自动切割机的安装机构整体结构剖视图;
26.图2为本实用新型提出的一种机械加工中心用自动切割机的切割机构结构主视图;
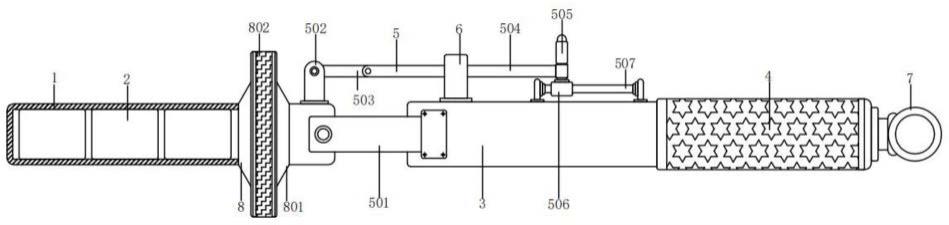
27.图3为本实用新型提出的一种机械加工中心用自动切割机的整体结构主视图。
28.图中:1安装机构、11工作台、12加工槽、13输送组件、14第一滑槽、15第二滑槽、16收集箱、17吸尘器、2夹持机构、21凹槽板、22滑动板、23夹持板、24固定块、3感应机构、31支撑架、32第三滑槽、33电动伸缩杆、34第一滑块、35红外线传感器、4切割机构、41第一伺服电机、42丝杆、43连接块、44第二滑块、45第二伺服电机、46切割片、47电机罩。
具体实施方式
29.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
30.实施例1,参照图1-3,一种机械加工中心用自动切割机,包括安装机构1、夹持机构2、感应机构3和切割机构4;
31.安装机构:所述安装机构1包括工作台11和工作台11顶部外壁中部开有加工槽12,且工作台11两侧内壁底部均安装有输送组件13;
32.夹持机构2:包括焊接于工作台11顶部外壁等距离分布的凹槽板21和凹槽板21内
壁滑动连接有滑动板22,且滑动板23一侧外壁焊接有夹持板23,滑动板23顶部一侧外壁通过螺栓连接有固定块24;
33.为了准确的描述加工槽12的内结构,加工槽12相对一侧内壁上部开有第一滑槽14,且加工槽12相对一侧内壁下部开有第二滑槽15,工作台11底部开有加工槽12外壁焊接有防护罩,且防护罩底部外壁通过连接管连接有收集箱16,收集箱16一侧外壁通过连接管连接有吸尘器17;
34.为了准确的描述输送组件13的结构组成,输送组件13包括通过轴承安装于工作台11内壁两端上的滚筒、固定于工作台外壁上的传送电机和套接于两个滚筒上的传送皮带,传送电机输出轴与一个滚筒连接,传送皮带为网格状结构;
35.通过设置的夹持机构2,利用滑动板22与凹槽板21的滑动连接,并且通过固定块24利用螺栓滑动板22相连接进行固定,可以在加工时根据工件的大小进行调节加持固定;
36.通过设置的吸尘器17和收集箱16,可以在切割加工时利用吸尘器17的吸附功能将产生的灰尘吸入到收集箱16内进行收集,这样可以在加工时防止灰尘对周围环境造成破坏。
37.实施例2,参照图1-3,本实施例是在实施例1的基础上进行优化,具体是:
38.感应机构3:包括焊接于工作台11顶部一侧外壁的支撑架31和支撑架31底部外壁中部开有第三滑槽32,且支撑架31一侧外壁通过螺栓连接有电动伸缩杆33;
39.为了准确的描述电动伸缩杆33外壁的连接结构,电动伸缩杆33杆身一侧外壁通过螺栓固定有第一滑块34,且第一滑块34底部外壁通过螺栓连接有红外线传感器35,第一滑块34外壁与第三滑槽32内壁滑动连接;
40.为了准确的描述红外线传感器33的连接结构,红外线传感器33通过信号线连接有控制器,且控制器通过信号线与输送组件13、第一伺服电机41和第二伺服电机45相连接;
41.通过设置的红外线传感器35可以在加工时利用电动伸缩杆33的伸缩功能调节红外线传感器35的位置,从而可以对切割的长度进行控制,同时可以在利用红外线传感器35的感应功能传递信号给控制器,利用控制器控制第一伺服电机41和第二伺服电机45对工件进行切割,并且在切割后控制输送组件13进行自动输送,这样的连接方式可以使用时实现切割机的自动切割。
42.实施例3,参照图1-3,本实施例是在实施例1的基础上进行优化,具体是:
43.切割机构4:包括通过螺栓固定于工作台11一侧外壁的第一伺服电机41和第一伺服电机41的输出轴通过转动杆连接有丝杆42,且丝杆42外壁螺接有连接块43。
44.为了准确的描述连接块43外壁的连接结构,连接块43两侧外壁底部均焊接有第二滑块44,且连接块43一侧外壁顶部通过转动孔转动连接有转动轴,转动轴一侧外壁连接有第二伺服电机45,且转动轴另一侧外壁固定有切割片46,第二伺服电机45外壁安装有电机罩47;
45.为了准确的描述第二滑块和电机罩与第二滑槽和第一滑槽的连接关系,第二滑块44外壁与第二滑槽15内壁滑动连接,且电机罩47外壁与第一滑槽14内壁滑动连接。
46.工作原理:当使用者使用该台设备时,首先将工件放置到输送组件13上,接着根据工件的大小通过设置的夹持机构2,利用滑动板22与凹槽板21的滑动连接,并且通过固定块24利用螺栓滑动板22相连接进行固定,然后输送组件13进行工作输送工件至红外线传感器
35的位置,利用红外线传感器35的感应功能传递信号给控制器,利用控制器控制第一伺服电机41和第二伺服电机45对工件进行切割,并且在切割后控制输送组件13进行自动输送,在切割的过程中通过设置的吸尘器17和收集箱16,可以在切割加工时利用吸尘器17的吸附功能将产生的灰尘吸入到收集箱16内进行收集。
47.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。